多频多模GNSS高频精密卫星钟差的实时非差估计方法
多频多模gnss高频精密卫星钟差的实时非差估计方法
技术领域
1.本发明涉及高精度定位领域,尤其涉及一种多频多模gnss高频精密卫星钟差的实时非差估计方法。
背景技术:
2.高精度gnss定位服务依赖于增强信息,精密卫星钟差作为增强信息中的重要内容,在精密定位应用中起着关键作用。随着gnss实时高精度应用服务范围的不断拓展,其对gnss实时卫星钟差估计提出了更迫切的要求。实时卫星钟差估计通常采用历元间单差或混合差分模式进行,此方式虽然可以消除相位模糊度带来的大量计算负荷影响,保证时效性需求,却牺牲了观测值中大量的有用信息。此外,由于当前的实时钟差更新频率基本在5s或者10s,无法满足部分高频实时ppp的应用。
技术实现要素:
3.本发明主要目的在于:提供一种多频多模gnss高频精密卫星钟差的实时非差估计方法,有助于实现实时高频数据处理。
4.本发明所采用的技术方案是:一种多频多模gnss高频精密卫星钟差的实时非差估计方法,本方法包括:
5.基于低频线程和高频线程并行的参数估计模式;
6.所述的低频线程利用伪距和相位观测值信息,构建低频满秩模型,基于非差模式进行实时钟差估计,实现相位模糊度、天顶对流层延迟、斜电离层延迟和伪距偏差联合估计;
7.所述的高频线程建立高频估计模型,基于非差模式进行实时钟差估计,对高频相位观测值添加相位模糊度改正,同时将天顶对流层延迟作为滤波的先验信息实现实时高频卫星钟差估计;
8.在低频线程和高频线程实时处理模式中,gps、gloanss、bds、galileo四系统独立并行进行参数估计,优化参数解算效率,以满足实时钟差时效性需求。
9.按上述方法,所述的低频满秩模型的构建过程如下:
10.gnss非组合观测值原始伪距和载波相位方程表示为:
[0011][0012][0013]
式中,和分别为伪距和相位的观测值与计算值的差值;t表示的是系统类型;s表示的是卫星号;r为对应的接收机编号;f为频率号,f=1,2,3...;c为真空光速;tr和ts分别为接收机钟差和卫星钟差;b
r,f
和为频率相关的接收机伪距硬件延迟与卫星伪距硬件延迟;为天顶对流层延迟;为电离层斜延迟的系数;为第一频点的斜电离层延迟;λf为频率f对应的载波相位波长;为载波相位模糊度,其吸收接收机端和卫
星端相位硬件延迟;为伪距观测噪声及其他未模型化误差之和;为载波相位观测噪声及其他未模型化误差之和;
[0014]
构建多个频点统一的接收机钟差参数,将接收机钟差吸收接收机端伪距硬件延迟的消电离层组合,则组合后的接收机钟差参数表示为:其中
[0015]
构建多个频点统一的卫星钟差参数,将卫星钟差吸收接卫星端伪距硬件延迟的消电离层组合,则组合后的卫星钟差参数表示为:其中
[0016]
统一伪距和载波相位观测方程中对应的电离层信息,则参数重组的电离层吸收接收机端和卫星端之间的伪距硬件延迟线性组合,第1频点的电离层参数的组合形式表示为:其他频点的电离层延迟基于μf和线性表示;其中线性表示;其中
[0017]
基于以上的参数重组统一卫星钟差、接收机钟差、电离层参数后,相位模糊度参数因此也吸收接收机端和卫星端之间的伪距偏差的线性组合:
[0018][0019]
将参数重组后的参数代入原始的gnss非组合模型中,则双频非组合卫星钟差估计模型表示为:
[0020]
考虑到三频信号和多频信号与l1、l2对应的伪距偏差差异,因此在其对应的伪距观测方程中添加对应的接收机伪距偏差和卫星伪距偏差参数,改正后的多频多模gnss卫星钟差估计的低频满秩模型表示为:
[0021][0022]
对应的伪距偏差的形式表示为:
[0023]
按上述方法,在低频满秩模型构建过程中,接收机钟差与卫星钟差之间相关性引起的秩亏,各系统通过所有卫星钟差构建零均值基准进行约束,m为各系统对应的全星座信息中最大卫星编号;
[0024]
频率编号大于2时,接收机伪距偏差和卫星伪距偏差之间的相关性引起的秩亏问
题,基于零均值基准进行约束。
[0025]
按上述方法,所述的改正后的多频多模gnss卫星钟差估计的低频满秩模型,采用扩展的卡尔曼滤波实现参数估计;
[0026]
扩展的卡尔曼滤波参数估计对应的观测方程和状态方程形式表示为其中xj为j时刻的状态向量,aj和为实际观测值lj和预报参数x
p,j
的设计矩阵,其可经过观测方程线性化得到;φj为状态转移矩阵,此处为单位阵,wj为系统噪声;预报参数x
p,j
的协方差表示为此处为单位阵。经量测更新对应的状态向量xj通过对应的状态向量的方差表示为
[0027]
按上述方法,高频估计模型引入对应的相位模糊度改正,基于l1和l2双频消电离层组合构建如下模型:
[0028][0029]
其中对应的消电离层组合相位模糊度改正信息基于低频模型顾及的l1和l2模糊度线性组合表示为且对应的相位观测值方差信息为在此过程中,高频观测值在高频第j历元,引入低频第i历元的相位模糊度信息进行改正,并且在下一个低频历元i+1完成解算之前,高频历元仍然沿用相同的相位模糊度信息。
[0030]
按上述方法,所述高频估计模型中,接收机钟差和卫星钟差参数之间相关性导致的秩亏问题,采用各系统内所有卫星钟差构建零均值基准进行约束。
[0031]
一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述多频多模gnss高频精密卫星钟差的实时非差估计方法的步骤。
[0032]
本发明产生的有益效果是:
[0033]
1、本发明采用高、低频双线程并行处理,高频模式就近采用低频相位模糊度改正可减小参数解算负荷,提升实时卫星钟差估计效率,同时分系统并行处理的方式,能够降低法方程维度,便于参数高效求解,有助于实现实时高频数据处理;低频线程和高频线程在进行实时钟差估计时均基于非差模式进行,能够保留观测信息,具备较高的钟差估计精度和可靠性,同时可以实现相位模糊度固定,促进估计的卫星钟差产品的高精度定位应用。
[0034]
2、本发明使用的函数模型能兼容双频、三频及以上多频gnss卫星钟差估计。
附图说明
[0035]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0036]
图1为完整的gnss实时卫星钟差估计算法及其流程图。
[0037]
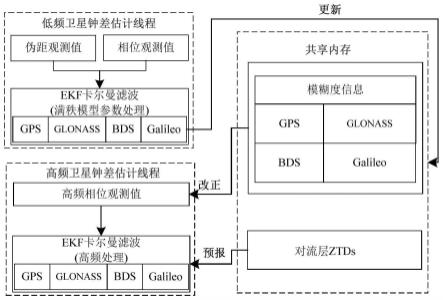
图2为基于高低频并行的非差非组合多频多模实时卫星钟差估计模块流程图。
具体实施方式
[0038]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0039]
本发明所涉及的数据处理,是基于实时数据流和ssr改正信息进行,结合图1,实际处理过程如下:
[0040]
ntrip用户向ntrip caster发送请求,接收其提供的实时数据流和ssr信息,根据具体需求将其存入计算机共享内存,然后同步缓存观测数据和ssr信息,避免由于时延造成的不稳定性,然后对实时数据质量控制和实时精密卫星轨道产品恢复等数据预处理工作。在用户解码ssr信息恢复轨道信息中,获得参考时刻tr的轨道(δor,δoa,δoc)、信息后,基于三维方向向量可获得对应的ecef坐标系下的轨道改正数信息然后基于广播星历还原得到卫星位置
[0041]
本发明提供一种多频多模gnss高频精密卫星钟差的实时非差估计方法,基于预处理后的实时数据和ssr信息进行gnss实时卫星钟差解算,实时钟差解算通过高低频并行的参数估计模式进行。所述的低频线程利用伪距和相位观测值信息,构建低频满秩模型,基于非差模式进行实时钟差估计,实现相位模糊度、天顶对流层延迟、斜电离层延迟和伪距偏差联合估计;所述的高频线程建立高频估计模型,基于非差模式进行实时钟差估计,对高频相位观测值添加相位模糊度改正,同时将天顶对流层延迟作为滤波的先验信息实现实时高频卫星钟差估计;在低频线程和高频线程实时处理模式中,各系统独立并行进行参数估计,优化参数解算效率,以满足实时钟差时效性需求。所述的系统为gps、glonass、bds和galileo4个子模块。
[0042]
基于rtcm协议将对应的实时高频卫星钟差编码成ssr信息,经过ntrip caster对外播发。编码过程中,广播星历中对应参考时刻tr的卫星钟差参考信息为(a0,a1,a2),对应的广播钟差可表示为c为真空光速。实时精密钟差表示为多项式的形式dts=[c0+c1·
(t-tr)+c2·
(t-tr)2]/c。则钟差改正数(δc0,δc1,δc2)可表示为发送至ssr的钟差改正信息。实时高精度用户基于接收的ssr改正信息进行解码,开展高精度定位应用。
[0043]
如图2所示,具体的高低频处理过程如下:
[0044]
gnss非组合观测值原始伪距和载波相位方程表示为:
[0045][0046][0047]
式中,和分别为伪距和相位的观测值与计算值的差值;t表示的是系统类
型;s表示的是卫星号;r为对应的接收机编号;f为频率号,f=1,2,3...;c为真空光速;tr和ts分别为接收机钟差和卫星钟差;b
r,f
和为频率相关的接收机伪距硬件延迟与卫星伪距硬件延迟;为天顶对流层延迟;为电离层斜延迟系数;为第1频点的斜电离层延迟;λf为频率f对应的载波相位波长;为载波相位模糊度,其吸收接收机端和卫星端相位硬件延迟;为伪距观测噪声及其他未模型化误差之和;为载波相位观测噪声及其他未模型化误差之和;为频率f对应的载波相位波长;
[0048]
构建多个频点统一的接收机钟差参数,将接收机钟差吸收接收机端伪距硬件延迟的消电离层组合,则组合后的接收机钟差参数表示为:其中
[0049]
构建多个频点统一的卫星钟差参数,将卫星钟差吸收接卫星端伪距硬件延迟的消电离层组合,则组合后的卫星钟差参数表示为:其中
[0050]
统一伪距和载波相位观测方程中对应的电离层信息,则参数重组的电离层吸收接收机端和卫星端之间的伪距硬件延迟线性组合,第1频点的电离层参数的组合形式表示为:其他频点的电离层延迟基于μf和线性表示;其中线性表示;其中
[0051]
基于以上的参数重组统一卫星钟差、接收机钟差、电离层参数后,相位模糊度参数因此也吸收接收机端和卫星端之间的伪距偏差的线性组合:
[0052][0053]
将参数重组后的参数代入原始的gnss非组合模型中,则双频非组合卫星钟差估计模型表示为:
[0054]
考虑到三频信号和多频信号与l1、l2对应的伪距偏差差异,因此在其对应的伪距观测方程中添加对应的接收机伪距偏差和卫星伪距偏差参数,改正后的多频多模gnss卫星钟差估计的低频满秩模型表示为:
[0055][0056]
对应的伪距偏差的形式表示为:
[0057]
和分别为当频率编号大于2时对应的接收机伪距偏差和卫星伪距偏差信息。
[0058]
所述的改正后的多频多模gnss卫星钟差估计的低频满秩模型,采用扩展的卡尔曼
滤波实现参数估计。扩展的卡尔曼滤波参数估计对应的观测方程和状态方程形式表示为其中xj为j时刻的状态向量,aj和为实际观测值lj和预报参数x
p,j
的设计矩阵,其可经过观测方程线性化得到;φj为状态转移矩阵,此处为单位阵,wj为系统噪声;预报参数x
p,j
的协方差表示为经量测更新对应的状态向量xj通过对应的状态向量的方差表示为基于扩展的卡尔曼滤波,针对不同的待估参数添加了虚拟观测值,使得参数处理过程更加灵活高效。为高低频处理中不同待估参数的灵活改正和估计提供了合理的解决方案。
[0059]
在低频满秩模型构建过程中,接收机钟差与卫星钟差之间相关性引起的秩亏,各系统通过所有卫星钟差构建零均值基准进行约束,m为各系统对应的全星座信息中最大卫星编号;频率编号大于2时,接收机伪距偏差和卫星伪距偏差之间的相关性引起的秩亏问题,基于零均值基准进行约束。
[0060]
在此参数估计的过程中,形成gps、glonass、bds和galileo 4个子模块独立运行,对应求解的对流层参数可作为高频处理中的先验信息,相位模糊度参数实现对高频处理中的参数改正,低频和高频两者之间通过共享内存建立联系。
[0061]
高频估计模型引入对应的相位模糊度改正,基于l1和l2双频消电离层组合构建如下模型:
[0062][0063]
此过程依赖于双频相位观测值经过消电离层组合实现高频钟差估计。而在此过程中,对应的消电离层组合相位模糊度改正信息基于低频模型顾及的l1和l2相位模糊度线性组合表示为重组后对高频相位观测值进行改正,且对应的相位观测值方差信息为
[0064]
所述高频估计模型中,接收机钟差和卫星钟差参数之间相关性导致的秩亏问题,采用各系统内所有卫星钟差构建零均值基准进行约束。
[0065]
扩展卡尔曼滤波参数估计中,针对高低频处理过程中对应的对流层参数和低频中的相位模糊度参数构建虚拟观测值信息,有助于处理实时参数估计中卫星升降和周跳处理等问题;同时对于高低频处理时效性的差异,在高低频并行处理中,低频解算完成后及时对高频中的相位模糊度和对流层信息进行更新,在低频运行时间段内继续保持原有的相位模糊度信息进行改正,高效的保证高频估计参数的高精度。
[0066]
本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述多频多模gnss高频精密卫星钟差实时非差估计方法的步骤。
[0067]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1