一种基于磷酸铁锂电池的荷电状态估算方法
1.本发明属于锂离子电池技术领域,应用于锂离子电池管理系统,具体涉及一种基于磷酸铁锂电池的荷电状态估算方法。
背景技术:
2.锂离子电池的荷电状态(state of charge,soc)是判断电池状态的重要依据之一。对于soc的实时准确估算是对电池合理、安全使用的前提,也是对电池进行管理的必要条件,从而延长电池整体寿命,提高电池的安全性。但锂离子电池内部的电化学反应复杂多变,其soc无法直接测量获取,仅能基于电池相关物理量通过一定方法估算获得。
3.扩展卡尔曼滤波因其较高的精度和较低的复杂度,在电池soc估算中得到认可。但该算法对模型精度依赖性较高,但常规的时不变电池模型对电池内部动态特性的适应性不理想,当电池模型受到温度和老化等因素影响时,soc估算精度会产生不同程度的下降,这显然不符合实际的需求。
技术实现要素:
4.针对上述现有技术存在的问题,本发明提供了一种基于磷酸铁锂电池的荷电状态估算方法,该方法通过将滑模观测器和双卡尔曼滤波算法进行融合,并加入独立的增益补偿环节,提升融合算法在估算锂离子电池soc过程中的鲁棒性。
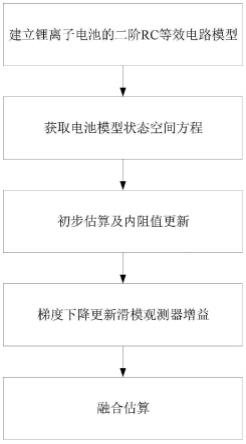
5.为实现上述目的,本发明提供了如下方案:本发明提供了一种基于磷酸铁锂电池的荷电状态估算方法,包括如下步骤:
6.步骤1、建立锂离子电池的二阶rc等效电路模型:采集开路电压数据与荷电状态数据,基于所述等效电路模型,获取不同状态下的电池模型参数;
7.步骤2、获取电池模型状态空间方程:基于基尔霍夫定律,通过所述等效电路模型和所述电池模型参数,得到模型状态空间方程;
8.步骤3、双卡尔曼滤波欧姆内阻更新:基于所述模型状态空间方程,使用卡尔曼滤波算法进行欧姆内阻的估算以及状态变量的时间更新;
9.步骤4、更新滑模观测器增益:基于所述时间更新的计算结果,使用梯度下降法更新融合算法中的滑模观测器增益;
10.步骤5、融合估算:使用融合滑模观测器的双卡尔曼滤波算法进行状态变量最优估计值的更新,并加入独立的补偿增益环节提高算法的收敛速度。
11.优选地,所述步骤4中使用梯度下降法更新融合算法中的滑模观测器增益。
12.优选地,所述使用梯度下降法计算公式为:
13.定义:
[0014][0015]
对上式的l求偏导得:
[0016][0017]
其中ck为观测方程的输出矩阵,r为滑模观测器参数,梯度下降递推过程为:
[0018]
sk=γsk+(1-γ)g
k2
[0019][0020]
其中,γ表示权重参数,η为学习率,τ为一较小参数,防止算法初期出现分母为零的情况。
[0021]
优选地,所述步骤5中采用融合滑模观测器的双卡尔曼滤波算法修正最优状态变量估计值更新。
[0022]
优选地,所述融合算法的状态变量估计值更新方程为:
[0023][0024]
其中,ε为单位阶跃函数,err为电压误差限值,lk为独立的反馈增益,当误差超限时,将该修正环节加入,未超限时,将该修正环节切除,该修正环节类似于一个独立的反馈增益环节,设立目标旨在提高算法的收敛速度;gk为k时刻融合算法增益,其更新过程为:
[0025][0026]
其中,hk为双卡尔曼滤波中用于状态变量更新的拓展卡尔曼滤波增益,dk为采用rmsprop算法进行梯度下降的递推结果。
[0027]
本发明公开了以下技术效果:
[0028]
与现有技术相比,本发明提供了一种基于磷酸铁锂电池的荷电状态估算方法,该方法通过在滑模观测器算法中融合双卡尔曼滤波算法,并采用rmsprop梯度下降法实现滑模观测器增益的自适应修正,并加入独立的补偿增益环节,提升了算法在存在soc初值误差时的收敛速度,增强了算法抑制噪声的能力。
附图说明
[0029]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0030]
图1为本发明公开的一种基于磷酸铁锂电池的荷电状态估算方法的流程框图示意。
[0031]
图2为锂离子电池二阶rc等效电路模型。
[0032]
图3为25℃美国联邦城市驾驶工况电流。
[0033]
图4-1、4-2分别为25℃美国联邦城市驾驶工况下初始soc准确,电压信号未加入噪声三种算法(滑模观测器smo、双卡尔曼滤波算法dkf、融合双卡尔曼滤波的滑模观测器算法dkf-smo)的soc估算结果及估算误差示意图。
[0034]
图5-1、5-2分别为25℃美国联邦城市驾驶工况下初始soc不准确,电压信号未加入
噪声三种算法(滑模观测器smo、双卡尔曼滤波算法dkf、融合双卡尔曼滤波的滑模观测器算法dkf-smo)的soc估算结果及估算误差示意图。
[0035]
图6-1、6-2分别为25℃美国联邦城市驾驶工况下,电压信号加入非高斯分布噪声三种算法(滑模观测器smo、双卡尔曼滤波算法dkf、融合双卡尔曼滤波的滑模观测器算法dkf-smo)的soc估算结果及估算误差示意图。
具体实施方式
[0036]
下面将结合附图和具体实施例对本发明作更进一步的说明。但应当理解的是,本发明可以以各种形式实施,以下在附图中出示并且在下文中描述的一些示例性和非限制性实施例,并不意图将本发明限制于所说明的具体实施例。
[0037]
参见图1,图1为本发明实施例的一种基于磷酸铁锂电池的荷电状态估算方法,包括如下步骤:
[0038]
步骤1、建立锂离子电池的二阶rc等效电路模型:采集开路电压数据与荷电状态数据,基于所述等效电路模型,获取不同状态下的电池模型参数。
[0039]
步骤1中锂离子电池的二阶rc等效电路模型如图2所示,由一个受控电压源、两个rc环节和一个欧姆内阻r0串联组成,受控电压源表示电池开路电压,rc环节(r1、c1、r2、c2)为极化内阻与极化内容,用于模拟电池电化学极化与浓差极化,电池欧姆内阻用于模拟电池欧姆极化过程。
[0040]
步骤1具体按照以下步骤实施:
[0041]
步骤1.1、静置法通过对满电状态电池以一恒定倍率间断性进行放电并充分静置(以10%soc为间隔),获取电池的开路电压u
oc
与soc数据;
[0042]
步骤1.2、采用最小二乘法拟合开路电压u
oc
与soc间的关系,使用9阶多项式u
oc
=a1*soc9+a2*soc8+a3*soc7+a4*soc6+a5*soc5+a6*soc4+a7*soc3+a8*soc2+a9*soc+a
10
进行拟合,获得开路电压u
oc
与soc间的函数关系;
[0043]
步骤1.3、根据电池脉冲放电瞬间的突变电压值除以突变电流值计算得到欧姆内阻;
[0044]
步骤1.4、通过公式获得电化学极化时间常数τ1、浓差极化时间常数τ2;通过公式得到电化学极化内阻r1,、浓差极化电阻r2,所述电化学极化时间常数τ1与所述电化学极化内阻r1的比值为第一极化电容c1,所述浓差极化时间常数τ2与所述浓差极化内阻r2的比值为第二极化电容c2;其中,u1为第一rc环节的端电压,u2为第二rc环节的端电压,u
oc
为电池的开路电压,i为电池的工作电流,u为电池的端电压;
[0045]
步骤1.5、根据不同的荷电状态执行所述步骤1.3至步骤1.4,得到不同荷电状态下电池模型参数。
[0046]
步骤2、获取电池模型状态空间方程:基于基尔霍夫定律,通过所述等效电路模型和所述电池模型参数,得到模型状态空间方程。
[0047]
步骤2所建立的模型状态空间方程,包括状态方程和观测方程,如下:
[0048][0049]
uk=u
oc,k-u
1,k-u
2,k-r0ik+vk[0050]
其中,t为采样周期,wk为过程噪声,vk为测量噪声,cn为电池额定容量,soc表示电池荷电状态,k代表当前时刻迭代计算步数。
[0051]
状态空间方程可以简化为:
[0052]
xk=ax
k-1
+bi
k-1
+w
k-1
[0053]
uk=u
oc,k-u
1,k-u
2,k-r
0,k
ik+vk[0054]
其中,
[0055]
同时将内阻r0作为参数向量,并认为其值为缓慢变化的,可以得到如下的系统方程和观测方程:
[0056][0057]
其中ar=1。
[0058]
步骤3、双卡尔曼滤波欧姆内阻更新:基于所述模型状态空间方程,使用卡尔曼滤波算法进行欧姆内阻的估算以及状态变量的时间更新。
[0059]
步骤3具体按照以下步骤实施:
[0060]
步骤3.1、对所述模型观测方程在状态变量的估测值附近进行一阶泰勒展开,采用一阶近似并忽略其余高次项的方式实现系统的线性化:
[0061][0062]
其中,m为一阶泰勒展开产生的误差,可忽略不计;c为状态变量的输出矩阵;
[0063]
对于内阻r0,仅需采用普通的卡尔曼滤波算法进行估算即可,此时:
[0064][0065]
步骤3.2、设置状态变量初始值x0,r0,状态误差协方差初始值p0,pr,以及过程噪声
协方差q和qr和测量噪声协方差r和rr初始值;
[0066]
步骤3.3、根据电池此时的soc,结合步骤1中获得的不同soc下电池模型参数,得到电池模型参数。对于不在对应关系内的荷电状态soc值,采用四舍五入方法得到临近soc对应的参数值代替;
[0067]
步骤3.4、状态变量时间更新:其中,为状态变量k时刻一步预测值,i
k-1
为k-1时刻工作电流,为k-1时刻状态变量最优估计值;内阻r0状态变量更新:r
0,k
=arr
0,k-1
,其中r
0,k
为k时刻内阻的最优估计值,r
0,k-1
为k-1时刻内阻的最优估计值。
[0068]
测量矩阵更新:为k时刻一步预测端电压观测值,u
oc,k|k-1
为k时刻一步预测开路电压值,u
1,k|k-1
为k时刻一步预测第一rc环节端电压值,u
2,k|k-1
为k时刻一步预测第二rc环节端电压值;
[0069]
步骤3.5预测误差协方差矩阵:p
k|k-1
=ap
k-1|k-1at
+q,p
k-1|k-1
为k-1时刻误差协方差,a
t
为矩阵a的转置,p
k|k-1
为k时刻误差协方差一步预测值;内阻预测误差协方差矩阵:p
r,k|k-1
=arp
r,k-1|k-1art
+qr,p
r,k-1|k-1
为k-1时刻内阻估算的误差协方差,p
r,k|k-1
为k时刻内阻估算的误差协方差一步预测值。
[0070]
步骤3.6、拓展卡尔曼滤波增益:hk=p
k|k-1ct
(cp
k|k-1ct
+r)-1
,hk为k时刻状态变量更新的拓展卡尔曼滤波增益;欧姆内阻估算的卡尔曼滤波增益:h
r,k
=p
r,k|k-1cr,kt
(c
r,k
p
r,k|k-1cr,kt
+rr)-1
,h
r,k
为k时刻内阻估计的卡尔曼滤波增益;
[0071]
步骤3.7、更新内阻的最优估计值协方差矩阵p
r,k|k
,此时的最优估计值暂不进行更新。
[0072][0073]
p
r,k|k
=[i-h
r,kcr,k
]p
r,k|k-1
[0074]
步骤4、更新滑模观测器增益:基于所述时间更新的计算结果,使用梯度下降法更新融合算法中的滑模观测器增益。
[0075]
定义:
[0076][0077]
对上式中的l求偏导得:
[0078][0079]
其中ck为观测方程的输出矩阵,r为滑模观测器参数,梯度下降递推过程为:
[0080]
sk=γsk+(1-γ)g
k2
[0081][0082]
其中γ表示权重参数,η为学习率,τ为一较小参数,防止算法初期出现分母为零的情况。
[0083]
步骤5、融合估算:使用融合滑模观测器的双卡尔曼滤波算法进行状态更新,加入
独立的补偿增益环节提高算法的收敛速度。
[0084]
步骤5具体按照以下步骤实施:
[0085]
步骤5.1、执行步骤3.1。
[0086]
步骤5.2、设置状态变量初始值x0,r0状态误差协方差初始值p0,p
r,0
以及过程噪声协方差q、qr、测量噪声协方差r和rr初始值。
[0087]
步骤5.3、根据当前电池的荷电状态soc,计算电池模型参数。
[0088]
步骤5.4、执行步骤3.4至步骤3.7。
[0089]
步骤5.5、执行步骤4。
[0090]
步骤5.6、更新状态变量的最优估计值:
[0091]
求取融合算法的增益:
[0092]hk
为双卡尔曼滤波中的拓展卡尔曼滤波增益,dk为采用rmsprop算法进行梯度下降的递推结果
[0093]
更新状态变量的最优估计值:
[0094][0095]
其中,ε为单位阶跃函数,err为电压误差限值,lk为独立的反馈增益,当误差超限时,将该修正环节加入,未超限时,将该修正环节切除,该修正环节类似于一个独立的反馈增益环节,设立目标旨在提高算法的收敛速度。
[0096]
更新协方差矩阵:
[0097]
p
k|k
=(i-hkc)p
k|k-1
[0098]
步骤5.7、循环步骤5.3至步骤5.6,实时估算锂离子电池荷电状态。
[0099]
为了验证本发明估算soc的效果,以a123公司生产额定容量2.5ah的磷酸铁锂电池anr26650作为研究对象,进行模拟工况实验。模拟工况为25℃下美国联邦城市驾驶工况(federal urban driving schedule,fuds),充放电电流如图3所示。由图4-1、4-2、5-1、5-2可知在无噪声干扰时,融合双卡尔曼滤波的滑模观测器算法的估算精度与收敛速度优于双卡尔曼滤波算法和滑模观测器算法。由图6-1、6-2可知在对电压信号添加混合高斯分布噪声后,融合滑模观测器的双卡尔曼滤波算法的估算精度与收敛速度仍优于双卡尔曼滤波算法和滑模观测器算法。综合来看,融合双卡尔曼滤波的滑模观测器算法在面对非高斯分布的测量噪声与soc初值误差时具有良好的鲁棒性。
[0100]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1