一种EQEP模块及电机位置与速度的测量系统及方法与流程
一种eqep模块及电机位置与速度的测量系统及方法
技术领域
1.本发明涉及电机控制领域,特别是涉及一种eqep模块及电机位置与速度的测量系统及方法。
背景技术:
2.现代智能物联设备发展迅速,其中电动伺服系统在整个行业中有着不可替代的作用,如扫地机器人,3d打印等的对运动轨迹控制,位置控制等要求较高的智能设备,需要大量采用电动伺服系统。但是,如何满足对精度、性能和先进控制策略高标准的要求,仍是现在亟需解决的任务。
技术实现要素:
3.本发明的目的是提供一种eqep模块及电机位置与速度的测量系统及方法,能够提高对智能设备位置和速度测量的精度。
4.为实现上述目的,本发明提供了如下方案:
5.一种eqep模块,包括:正交编码单元、位置计数控制单元、时基单元、正交捕获单元以及看门狗;
6.所述正交编码单元用于根据光编码器获取的电机旋转产生的相移90
°
的正交输入信号eqepa和eqepb、索引信号eqepi以及选通输入eqeps确定编码信号;所述编码信号包括:正交输入信号的两个输入时钟的上升/下降沿产生的正交时钟qclk、选择计数模式的信号qdir、正交脉冲信号的绝对开始位置qi、电机到达定义位置的次数qs、中断信息phe以及反馈给外部的位置计数方向和个数的信号pcs out;
7.所述正交捕获单元用于当电机转速小于转速最小阈值时,根据两个输入时钟的上升/下降沿产生的正交时钟qclk进行电机转速测量;
8.所述时基单元与所述位置计数控制单元和系统时钟连接;所述时基单元用于根据系统时钟产生的周期性中断进行速度计算;
9.所述看门狗与所述位置计数控制单元连接;所述看门狗用于进行失速检测;
10.所述位置计数控制单元与所述正交编码单元连接;所述位置计数控制单元用于接收所述编码信号,并根据所述编码信号确定电机的运转方向、计数、位置以及产生中断信息。
11.可选地,所述位置计数控制单元包括:位置计数器和位置计数寄存器。
12.一种电机位置与速度的测量系统,所述测量系统包括:通过可编程输入模块连接的一种eqep模块以及光编码器;所述测量系统包括:
13.位置测量模块,用于当eqep模块在位置事件,复位位置计数模式下工作时,当索引信号qepi为正向运动时,位置计数控制单元内部的位置计数器复位为0;当索引信号qepi为反向运动时,位置计数器复位为位置计数控制单元内部的位置计数寄存器内的值;并根据位置计数器的的位置计数值和光编码器的辨率线数确定转子机械角度;
14.电机转速测量模块,用于当电机转速大于转速最大阈值时,采用m法测量速度;当电机转速小于转速最小阈值时,采用t法测量速度;当电机转速大于等于转速最小阈值且小于等于转速最大阈值时,采用m/t结合法测量速度。
15.可选地,所述位置测量模块具体包括:
16.位置测量单元,用于利用公式确定转子机械角度;
17.其中,θ为转子机械角度,qposcnt为位置计数器的的位置计数值,x为光编码器的辨率线数,θ
ex
为角度偏移量。
18.可选地,所述电机转速测量模块具体包括:
19.电机转速第一测量单元,用于利用公式确定电机转速;
20.电机转速第二测量单元,用于利用公式确定电机转速;
21.电机转速第三测量单元,用于利用公式sc=axs
t
+bxsm确定电机转速;
22.其中,sm为当电机转速大于转速最大阈值时的电机转速,s
t
为当电机转速小于转速最小阈值时的电机转速,sc为当电机转速大于等于转速最小阈值且小于等于转速最大阈值时的电机转速,q
p
为位置计数寄存器内的值,fs为测速频率,d
p
为位置脉冲分频数的倒数,cs为系统时钟,qc为位置计数寄存器qcprdlat中的值,a和b为权值系数,为位置计数寄存器qcprdlat中的值,a和b为权值系数,sh和s
l
分别为转速最大阈值和转速最小阈值。
23.一种电机位置与速度的测量方法,用于实现所述的一种电机位置与速度的测量系统,所述测量方法包括:
24.当eqep模块在位置事件,复位位置计数模式下工作时,当索引信号qepi为正向运动时,位置计数控制单元内部的位置计数器复位为0;
25.当索引信号qepi为反向运动时,位置计数器复位为位置计数控制单元内部的位置计数寄存器内的值;
26.根据位置计数器的的位置计数值和光编码器的辨率线数确定转子机械角度;
27.当电机转速大于转速最大阈值时,采用m法测量速度;
28.当电机转速小于转速最小阈值时,采用t法测量速度;
29.当电机转速大于等于转速最小阈值且小于等于转速最大阈值时,采用m/t结合法测量速度。
30.根据本发明提供的具体实施例,本发明公开了以下技术效果:
31.本发明所提供的一种eqep模块及电机位置与速度的测量系统及方法,eqep模块,包括:正交编码单元、位置计数控制单元、时基单元、正交捕获单元以及看门狗;正交编码单元根据光编码器获取的电机旋转产生的相移90
°
的正交输入信号、索引信号以及选通输确定编码信号;正交捕获单元当电机转速小于转速最小阈值时,根据两个输入时钟的上升/下降沿产生的正交时钟进行电机转速测量;时基单元根据系统时钟产生的周期性中断进行速度计算;位置计数控制单元用于接收所述编码信号,并根据所述编码信号确定电机的运转方向、计数、位置以及产生中断信息,eqep模块与光编码器相配合,可以实时反馈推算装载电机的扫地机器人等智能设备的高精度位置和速度等。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
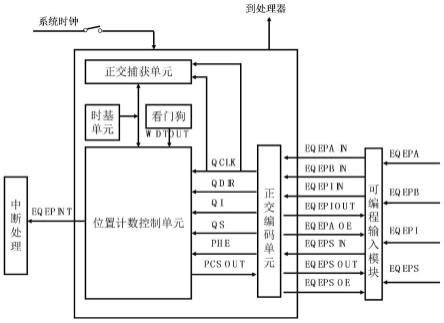
33.图1为本发明所提供的一种eqep模块结构示意图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.本发明的目的是提供一种eqep模块及电机位置与速度的测量系统及方法,能够提高对智能设备位置和速度测量的精度。
36.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
37.图1为本发明所提供的一种eqep模块结构示意图,如图1所示,本发明所提供的一种eqep模块,包括:正交编码单元、位置计数控制单元、时基单元、正交捕获单元以及看门狗。
38.所述正交编码单元用于根据光编码器获取的电机旋转产生的相移90
°
的正交输入信号eqepa和eqepb、索引信号eqepi以及选通输入eqeps确定编码信号;所述编码信号包括:正交输入信号的两个输入时钟的上升/下降沿产生的正交时钟qclk、选择计数模式的信号qdir、正交脉冲信号的绝对开始位置qi、电机到达定义位置的次数qs、中断信息phe以及反馈给外部的位置计数方向和个数的信号pcs out。
39.所述正交捕获单元用于当电机转速小于转速最小阈值时,根据两个输入时钟的上升/下降沿产生的正交时钟qclk进行电机转速测量。
40.所述时基单元与所述位置计数控制单元和系统时钟连接;所述时基单元用于根据系统时钟产生的周期性中断进行速度计算。
41.所述看门狗与所述位置计数控制单元连接;所述看门狗用于进行失速检测。
42.所述位置计数控制单元与所述正交编码单元连接;所述位置计数控制单元用于接
收所述编码信号,并根据所述编码信号确定电机的运转方向、计数、位置以及产生中断信息。
43.如图1所示,本发明所提供的一种eqep模块通过可编程输入模块与光电编码器连接;通过可编程输入模块将光编码器获取的电机旋转产生的相移90
°
的正交输入信号eqepa和eqepb、索引信号eqepi以及选通输入eqeps确定编码信号对应生成的eqeqain、eqepb in、eqepi in、eqeps in、eqepi out、eqeps out、eqepa和eqeps对应的使能信号eqeqa oe和eqeps oe输入至eqep模块中。
44.所述位置计数控制单元包括:位置计数器和位置计数寄存器。
45.当eqep单元选择正交计数模式时,设备通过检测eqepa和eqepb信号的边沿,为位置计数器提供计数时钟qclk,其中eqep逻辑产生的时钟频率是输入时钟频率的4倍。正交编码单元于判断两路输入信号的先后顺序,给出计数方向qdir,以决定位置计数控制单元增加计数和减少计数。于是与光编码器相连的电机转子转动至圆形平面任意位置时,都将有一个特定的位置计数值与之对应,通过计算即可得到电机位置状态。
46.本发明还提供一种电机位置与速度的测量系统,所述测量系统包括:通过可编程输入模块连接的所述的一种eqep模块以及光编码器;所述测量系统包括:
47.位置测量模块,用于当eqep模块在位置事件,复位位置计数模式下工作时,当索引信号qepi为正向运动时,位置计数控制单元内部的位置计数器复位为0;当索引信号qepi为反向运动时,位置计数器复位为位置计数控制单元内部的位置计数寄存器内的值;并根据位置计数器的的位置计数值和光编码器的辨率线数确定转子机械角度;
48.电机转速测量模块,用于当电机转速大于转速最大阈值时,采用m法测量速度;当电机转速小于转速最小阈值时,采用t法测量速度;当电机转速大于等于转速最小阈值且小于等于转速最大阈值时,采用m/t结合法测量速度。
49.当电机转速大于转速最大阈值时,此时以时基单元内部的时间单元为时基;
50.当电机转速小于转速最小阈值时,利用正交捕获单元进行边沿检测,即测量特定个数的位置计数脉冲之间的定时器周期,实现测量两个位置事件之间的时间。
51.当电机转速大于等于转速最小阈值且小于等于转速最大阈值时,机处于低速到高速的平滑转化过程。
52.当光编码器的辨率线数为x时,位置计数寄存器内的值为4x-1,电机转子做360
°
圆周转动时,位置计数单元中的计数值从0~4x-1做线性变化,于是可以从位置计数寄存器中直接得到与转子位置成比例关系的位置计数值qposcnt,于是可计算出转子机械角度为:
[0053][0054]
根据实际情况,机械角度会因为电机转子安装过程的不同或参考坐标系的选择不同而发生变化,于是在上述公式中引入一个角度偏移量θ
ex
进行角度修正,于是得到新的转子机械角度计算公式。
[0055]
位置测量单元用于利用公式确定
转子机械角度;
[0056]
其中,θ为转子机械角度,qposcnt为位置计数器的的位置计数值,x为光编码器的辨率线数,θ
ex
为角度偏移量。
[0057]
所述电机转速测量模块具体包括:
[0058]
电机转速第一测量单元,用于利用公式确定电机转速;
[0059]
电机转速第二测量单元,用于利用公式确定电机转速;
[0060]
电机转速第三测量单元,用于利用公式sc=axs
t
+bxsm确定电机转速;
[0061]
其中,sm为当电机转速大于转速最大阈值时的电机转速,s
t
为当电机转速小于转速最小阈值时的电机转速,sc为当电机转速大于等于转速最小阈值且小于等于转速最大阈值时的电机转速,q
p
为位置计数寄存器内的值,fs为测速频率,d
p
为位置脉冲分频数的倒数,cs为系统时钟,qc为位置计数寄存器qcprdlat中的值,a和b为权值系数,为位置计数寄存器qcprdlat中的值,a和b为权值系数,sh和s
l
分别为转速最大阈值和转速最小阈值。
[0062]
本发明所提供的一种电机位置与速度的测量方法,用于实现所述的一种电机位置与速度的测量系统,所述测量方法包括:
[0063]
s101,当eqep模块在位置事件,复位位置计数模式下工作时,当索引信号qepi为正向运动时,位置计数控制单元内部的位置计数器复位为0;
[0064]
s102,当索引信号qepi为反向运动时,位置计数器复位为位置计数控制单元内部的位置计数寄存器内的值;
[0065]
s103,根据位置计数器的的位置计数值和光编码器的辨率线数确定转子机械角度;
[0066]
s104,当电机转速大于转速最大阈值时,采用m法测量速度;
[0067]
s105,当电机转速小于转速最小阈值时,采用t法测量速度;
[0068]
s106,当电机转速大于等于转速最小阈值且小于等于转速最大阈值时,采用m/t结合法测量速度。
[0069]
本发明通过设计的eqep模块和光编码器相配合,光编码器产生的输出eqepa,eqepb,eqepi和eqeps信号经过可编程输入模块处理后进入到eqep模块中,该模块可以集成到相应的dsp芯片中,通过算法可以实时反馈推算装载电机的扫地机器人等智能设备的高精度位置和速度等,满足对精度、性能和先进控制策略高标准的要求。
[0070]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0071]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说
明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1