一种矫正投影光路畸变的结构光三维测量方法
1.本发明涉及结构光三维测量领域,特别一种矫正投影光路畸变的结构光三维测量方法。
背景技术:
2.在结构光三维测量领域中,镜头畸变的存在是影响三维测量精度的一个重要的因素。相对于投影仪光路畸变的矫正,相机畸变的矫正较为简单,可以直接通过标定参数对拍摄到的图像进行矫正。但是由于投影仪不具有获取图像信息的能力,因此在获得畸变参数后无法直接对投影仪图案进行畸变的矫正。当使用当个方向的条纹进行重建时,因为畸变的影响,等相位面往往不是一个平面。因此寻找一种行之有效的投影光路畸变矫正方法十分重要。
技术实现要素:
3.为了求解三维坐标的同时矫正投影光路,本发明提供了一种矫正投影光路畸变的结构光三维测量方法。
4.本发明采用的技术方案如下:一种矫正投影光路畸变的结构光三维测量方法,步骤如下:
5.步骤一,以线性透视变换为基准,根据带有畸变的投影图案得到的相位值求解未经过畸变矫正的三维坐标p
dis
(x,y,z);
6.步骤二,将求解出来的三维坐标p
dis
(x,y,z),根据线性变换模型映射至dmd靶面上的二维像素坐标;
7.步骤三,利用标定结果的畸变参数(k1,k2,k3,p1,p2)在dmd靶面坐标系上将dmd靶面上的二维像素坐标进行矫正,得到非畸变的dmd坐标;
8.步骤四,基于同样的线性映射模型并结合相机成像光线求解得到真实的三维坐标p(x,y,z)。
9.优选的,步骤一具体如下:
10.由针孔成像模型可知:
[0011][0012]
其中f
x_p
与f
y_p
为投影仪镜头的焦距,u
p
与v
p
分别为相机的像素坐标,(u
0_p
,v
0_p
)为投影仪靶面的主点位置,(u
p
,v
p
)为投影仪的靶面像素坐标;
[0013]
可以通过下式计算:
[0014][0015]
分别为展开相位,可以通过相移法展开相位得到其中n
x
与ny分别为投影图案正弦条纹的周期数,ω
x
与ωy为单位相位所占像素数,rt
p3
×4为投影仪的外参数矩阵;
[0016]
通过相机的外参数矩阵和投影仪外参数矩阵将投影仪的像素坐标与相机的像素坐标相关联:
[0017][0018]
其中
“‑
1”表示对矩阵的伪逆,rt
c3
×4代表相机坐标系下的外参数矩阵;
[0019]
由此得到:
[0020][0021]
将内参数矩阵和外参数矩阵合并成一个矩阵r,即:
[0022][0023]
提取公式(4)的第一行可以得到:
[0024]zpup
=r(1,1)
·
xc+r(1,2)
·
yc+r(1,3)
·
zc+r(1,4)
ꢀꢀ
(6)
[0025]
其中z
p
可以以公式(3)推导得出;
[0026]
从相机出发可以得到两个约束条件:
[0027][0028]
结合公式(6)与公式(7)可以得到物体的三维坐标:
[0029]
[0030]
优选的,步骤二具体为:
[0031]
首先通过式(3)将pc(x,y,z)转变为p
p
(x,y,z),并由式(1)可得:
[0032][0033]
最终,dmd靶面像素坐标为:
[0034][0035]
优选的,步骤三具体为:
[0036]
通过步骤二中求解出的投影仪像素坐标与投影仪标定结果畸变参数(k1,k2,k3,p1,p2)对像素坐标进行矫正:
[0037][0038]
最后得到无畸变的投影仪像素坐标(u,v)。
[0039]
优选的,步骤四具体为:
[0040]
通过步骤三中求得的去畸变后的像素坐标(u,v)带入公式(9)最终求得真实三维坐标p(x,y,z)。
[0041]
本发明具有如下有益效果:本发明提出了一种新的更加简洁的远心相机参数超定方程的求解方法,比以往的求解方法更加简单,降低了计算的复杂程度。
附图说明
[0042]
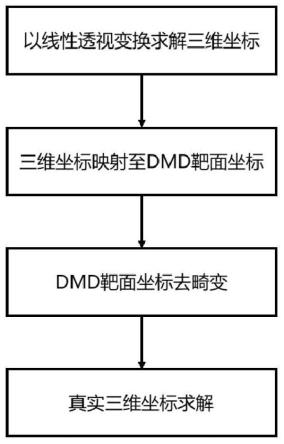
图1是本发明实施例的系统框图。
[0043]
图2是本发明实施例的投影光路畸变矫正模型;其中p为dmd靶面结果矫正后像素坐标,p
′
为dmd靶面未经过畸变矫正的像素坐标,p为经过矫正后的三维坐标,p
dis
为未经过矫正的三维坐标。
具体实施方式
[0044]
下面结合实施例与附图,对本发明作进一步说明。
[0045]
如图1所示,为本实施例的步骤流程。首先以线性透视变换为基准,根据带有畸变的投影图案得到的相位值求解带有畸变的三维坐标p
dis
(x,y,z)。然后将求解出来的三维坐标p
dis
(x,y,z),根据线性变换模型映射至dmd靶面上的二维像素坐标p
′
。利用标定结果的畸变参数(k1,k2,k3,p1,p2)将dmd靶面上的二维像素坐标进行矫正,得到非畸变的dmd坐标p。最后基于同样的线性映射模型并结合相机成像光线求解得到真实的三维坐标p(x,y,z)。
[0046]
本实施例的具体步骤如下:
[0047]
步骤一,求解三维未经过畸变矫正的三维坐标p
dis
(x,y,z)的。首先由针孔成像模
型可知:
[0048][0049]
其中f
x_p
与f
y_p
为投影仪镜头的焦距。u
p
与v
p
分别为相机的像素坐标。(u
0_p
,v
0_p
)为投影仪靶面的主点位置。(u
p
,v
p
)为投影仪的靶面像素坐标。可以通过下式计算:
[0050][0051]
分别为展开相位,可以通过相移法展开相位得到其中n
x
与ny分别为投影图案正弦条纹的周期数。ω
x
与ωy为单位相位所占像素数。rt
p3
×4为投影仪的外参数矩阵。通过相机的外参数矩阵和投影仪外参数矩阵将投影仪的像素坐标与相机的像素坐标相关联:
[0052][0053]
其中
“‑
1”表示对矩阵的伪逆,rt
c3
×4代表相机坐标系下的外参数矩阵。由此我们可以得到:
[0054][0055]
将内参数矩阵和外参数矩阵合并成一个矩阵r,即:
[0056][0057]
再提取整个公式(4)的第一行可以得到:
[0058]zpup
=r(1,1)
·
xc+r(1,2)
·
yc+r(1,3)
·
zc+r(1,4)
ꢀꢀ
(6)
[0059]
其中z
p
可以以公式(3)推导得出:
[0060]
从相机出发可以得到两个约束条件:
[0061][0062]
结合公式(6)与公式(7)可以得到物体的三维坐标:
[0063][0064]
步骤二,求解dmd靶面坐标,首先通过式(3)将pc(x,y,z)转变为p
p
(x,y,z),并由式(1)可得:
[0065][0066]
最终,dmd靶面像素坐标为:
[0067][0068]
步骤三,dmd靶面坐标去畸变。通过步骤三中dmd靶面坐标畸变去除的过程。通过步骤二中求解出的投影仪像素坐标与投影仪标定结果畸变参数(k1,k2,k3,p1,p2)对像素坐标进行矫正:
[0069][0070]
最后得到无畸变的投影仪像素坐标(u,v)。
[0071]
步骤四真实三维点的求解。通过步骤三中求得的去畸变后的像素坐标(u,v)带入公式(9)最终求得真实三维坐标p(x,y,z)。
[0072]
显然,本发明的上述实施例仅仅是为了说明本发明所作的举例,而并非对本发明的实施方式的限定。其他由本发明的实质精神所引申出的显而易见的变化或变动仍属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1