一种弹载双基前视SAR系统构型参数优化设计方法与流程
一种弹载双基前视sar系统构型参数优化设计方法
技术领域
1.本发明属于弹载双基前视sar成像系统设计领域,涉及一种弹载双基前视sar系统构型参数优化设计方法。
背景技术:
2.弹载双基前视合成孔径雷达(missile-borne bistatic forward-looking synthetic aperture radar,mbfl-sar)构型,可实现接收平台俯冲段全程二维高效高分辨成像。相比于机载、星载弹载双基构型,弹载双基构型具有不易受攻击、轨迹设计灵活、合成孔径时间短等优势。机载/星载双基平台的飞行轨迹都较为平稳,构型设计时只需考虑满足图像要求的指标即可。对于弹载双基平台,由于其机动性强,存在较大的三维加速度,成像时间越短,由加速度引起的轨迹弯曲越小,越有利于成像算法的处理。由于需要考虑成像时间对成像质量和制导精度的影响,所以传统的机载/星载双基系统构型设计方法不适用于弹载双基前视sar系统。所以需要针对弹载双基前视sar系统研究新的构型设计方法。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提出一种弹载双基前视sar系统构型参数优化设计方法,解决了系统指标要求约束条件下的弹载双基前视sar系统构型参数优化设计的问题,该方法能够在满足系统指标要求的前提下,快速获取使图像性能最优的系统构型参数,为弹载双基前视sar系统的构型参数设计提供了保证。
4.本发明解决技术的方案是:
5.一种弹载双基前视sar系统构型参数优化设计方法,包括:
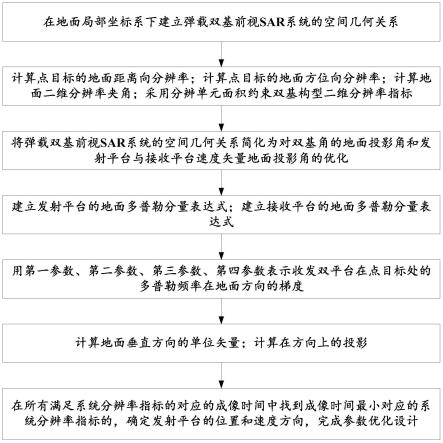
6.建立地面局部坐标系o-xyz,并在地面局部坐标系o-xyz下建立弹载双基前视sar系统的空间几何关系;弹载双基前视sar系统包括发射平台、接收平台和点目标p;
7.计算点目标p的地面距离向分辨率ρ
gr
;计算点目标p的地面方位向分辨率ρ
ga
;计算地面二维分辨率夹角ω;采用分辨单元面积s约束双基构型二维分辨率指标;
8.将弹载双基前视sar系统的空间几何关系简化为对双基角的地面投影角βg和发射平台与接收平台速度矢量地面投影角ψ的优化;
9.建立发射平台的地面多普勒分量表达式;建立接收平台的地面多普勒分量表达式;则收发双平台在点目标p处的多普勒频率f在地面方向的梯度为
10.设定关于双基角的地面投影角βg的第一参数a(βg)、第二参数b(βg)、第三参数c(βg);设定第四参数d;并用第一参数a(βg)、第二参数b(βg)、第三参数c(βg)、第四参数d表示收发双平台在点目标p处的多普勒频率f在地面方向的梯度
11.当双基角的地面投影角βg一定时,收发双平台到点目标p的距离之和r在地面方向
的梯度的大小和方向一定,即点目标p的地面距离向分辨率ρ
gr
的大小一定;为了使二维分辨单元面积最小,应使在地面垂直方向的投影最大;
12.计算地面垂直方向的单位矢量计算在方向上的投影f;
13.当双基角的地面投影角βg一定时,计算使投影f值最大的ψ值,记为ψ
opt
;并在所有满足系统分辨率指标的(βg,ψ
opt
)对应的成像时间中找到成像时间最小对应的系统分辨率指标的(βg,ψ
opt
),确定最终的发射平台的位置和速度方向,完成参数优化设计。
14.在上述的一种弹载双基前视sar系统构型参数优化设计方法,地面局部坐标系o-xyz的建立方法为:
15.原点o为地面场景中心点,o点所在地球的表切面为xoy平面,z轴垂直于xoy平面指向地球表面外法线方向,y轴为接收平台运动速度在xoy平面的投影方向,x轴由右手定则确定。
16.在上述的一种弹载双基前视sar系统构型参数优化设计方法,弹载双基前视sar系统的空间几何关系为:
17.接收平台只在yoz平面内移动;发射平台在与yoz平面夹角为ψ的平面内运动;点目标p位于地面局部坐标系o-xyz的原点o处;
18.在t时刻,发射平台和接收平台的位置矢量分别为p
t
和pr,速度矢量分别为v
t
和vr,到点目标
p
的斜距矢量分别为r
t
和rr,入射角分别为φ
t
和φr,下标t代表发射平台,下标r代表接收平台;发射平台与接收平台视线方向的夹角β为双基角;接收平台的俯冲角为γ;v
t
和vr在地面的投影矢量分别为v
tg
和v
rg
;发射平台与接收平台的速度投影矢量之间的夹角为ψ。
19.在上述的一种弹载双基前视sar系统构型参数优化设计方法,点目标p的地面距离向分辨率ρ
gr
的计算方法为:
[0020][0021]
式中,c为光速;
[0022]
为收发双平台到点目标的距离之和r在地面方向的梯度;
[0023]
b为距离向带宽;
[0024]
地面距离向分辨率ρ
gr
的方向与的方向相同;
[0025][0026]
式中,i
x
和iy分别为x和y方向的单位矢量;
[0027]
βg为双基角的地面投影角;
[0028]
φ
t
为发射平台入射角;
[0029]
φr为发接收台入射角;
[0030]
在b、φ
t
和φr一定的条件下,βg越小,地面距离向分辨率ρ
gr
越高。
[0031]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,点目标p的地面方位
向分辨率ρ
ga
的计算方法为:
[0032][0033]
式中,ta为成像时间;
[0034]
为收发双平台在点目标p处的多普勒频率f在地面方向的梯度;
[0035]
地面方位向分辨率ρ
ga
的方向与的方向相同;
[0036][0037]
式中,i
x
和iy分别为x和y方向的单位矢量;
[0038]ipt
和i
pr
分别为发射和接收平台视线方向的单位矢量;
[0039]
λ为发射平台发射信号波长;
[0040]vt
为发射平台的速度矢量;
[0041]vr
为接收平台的速度矢量;
[0042]rt
为发射平台到点目标p的斜距矢量;
[0043]rr
为接收平台到点目标p的斜距矢量;
[0044]
g=[1 1 0]为地面投影矢量。
[0045]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,地面二维分辨率夹角ω的计算方法为:
[0046][0047]
式中,为收发双平台到点目标的距离之和r在地面方向的梯度;
[0048]
为收发双平台在点目标处的多普勒频率f在地面方向的梯度。
[0049]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,采用分辨单元面积s约束双基构型二维分辨率指标的方法为:
[0050][0051]
式中,ρ
gr
为点目标p的地面距离向分辨率;
[0052]
ρ
ga
为点目标p的地面方位向分辨率;
[0053]
ω为地面二维分辨率夹角;
[0054]
由上式可以看出,当地面二维分辨率夹角ω为90度时,分辨单元面积s最小,对应的sar图像的效果最优。
[0055]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,发射平台的地面多普勒分量表达式为:
[0056][0057]
式中,λ为发射平台发射信号波长;
[0058]vt
为发射平台的速度矢量;
[0059]ipt
为发射平台视线方向的单位矢量;
[0060]rt
为发射平台到点目标p的斜距矢量;
[0061]
为发射平台的地面多普勒分量的x轴分量;
[0062]
为发射平台的地面多普勒分量的y轴分量;
[0063][0064]
式中,v
t
为发射平台的速度矢量;
[0065]rt
为发射平台到点目标p的斜距矢量;
[0066]
φ
t
为发射平台的入射角;
[0067]
βg为双基角的地面投影角;
[0068]
ψ为发射平台与接收平台速度矢量地面投影角。
[0069]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,接收平台的地面多普勒分量表达式为:
[0070][0071]
式中,λ为发射平台发射信号波长;
[0072]vr
为接收平台的速度矢量;
[0073]rr
为接收平台到点目标p的斜距矢量;
[0074]ipr
为接收平台视线方向的单位矢量;
[0075]
g=[1 1 0]为地面投影矢量;
[0076]
γ为接收平台的俯冲角;
[0077]
φr为接收平台的入射角。
[0078]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,第一参数a(βg)、第二参数b(βg)、第三参数c(βg)、第四参数d分别为:
[0079][0080]
式中,λ为发射平台发射信号波长;
[0081]vt
为发射平台的速度矢量;
[0082]
φ
t
为发射平台的入射角;
[0083]
βg为双基角的地面投影角;
[0084]rt
为发射平台到点目标p的斜距矢量;
[0085]vr
为接收平台的速度矢量;
[0086]rr
为接收平台到点目标p的斜距矢量;
[0087]
γ为接收平台的俯冲角;
[0088]
φr为接收平台的入射角;
[0089]
表示为:
[0090][0091]
式中,βg为双基角的地面投影角;
[0092]
ψ为发射平台与接收平台速度矢量地面投影角;为发射平台的地面多普勒分量;
[0093]
为接收平台的地面多普勒分量;
[0094]
上标t表示转置。
[0095]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,地面垂直方向的单位矢量的计算方法为:
[0096][0097]
式中,e(βg)为设定的关于双基角的地面投影角βg的第五参数;
[0098]
f(βg)为设定的关于双基角的地面投影角βg的第六参数;
[0099][0100]
式中,φ
t
为发射平台的入射角;
[0101]
βg为双基角的地面投影角;
[0102]
φr为接收平台的入射角。
[0103]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,在方向上的投影f的计算方法为:
[0104][0105]
式中,βg为双基角的地面投影角;
[0106]
ψ为发射平台与接收平台速度矢量地面投影角;
[0107]
d为设定的第四参数;
[0108]
a为第一中间量;
[0109]
b为第二中间量;
[0110][0111]
在上述的一种弹载双基前视sar系统构型参数优化设计方法,使投影f值最大的ψ
opt
的计算方法为:
[0112]
当d
·
f(βg)≥0,且ψ
opt
=π/2-α+2nπ时,投影f的最大值
[0113]
当d
·
f(βg)<0,且ψ
opt
=3π/2-α+2nπ时,
[0114]
投影f的最大值
[0115]
其中,n为整数;
[0116]
α为角度参数;且α满足
[0117]
本发明与现有技术相比的有益效果是:
[0118]
(1)本发明在系统指标的约束下,可快速计算得到成像时间最短且满足系统指标的发射平台构型参数,为较长成像时间造成的成像质量下降的问题提供了解决方案;
[0119]
(2)本发明通过分析构型参数对二维分辨率的影响规律,提出一种参数降维的构型设计方法,在提高构型参数设计效率的同时,能够有效缩短成像时间。解决了现有技术无法适应弹载双基前视sar系统构型设计的问题。
附图说明
[0120]
图1为本发明弹载双基前视sar系统构型参数优化设计流程图;
[0121]
图2为本发明弹载双基前视sar系统的空间几何关系示意图。
具体实施方式
[0122]
下面结合实施例对本发明作进一步阐述。
[0123]
本发明提供一种弹载双基前视sar系统构型参数优化设计方法,可快速计算得到成像时间最短且满足系统指标的发射平台构型参数,为较长成像时间造成的成像质量下降的问题提供了解决方案。相比于机载、星载双基构型,弹载双基构型具有不易受攻击、轨迹设计灵活、合成孔径时间短等优势。但是由于导弹机动性较强,对成像时间要求较高,这使得现有的机载/星载双基构型设计方法不适用于弹载前视双基构型。本发明方法通过分析构型参数对二维分辨率的影响规律,提出一种参数降维的构型设计方法,在提高构型参数设计效率的同时,能够有效缩短成像时间。解决了现有技术无法适应弹载双基前视sar系统构型设计的问题。
[0124]
弹载双基前视sar系统构型参数优化设计方法,如图1所示,具体包括如下步骤:
[0125]
建立地面局部坐标系o-xyz,并在地面局部坐标系o-xyz下建立弹载双基前视sar系统的空间几何关系;弹载双基前视sar系统包括发射平台、接收平台和点目标p。
[0126]
地面局部坐标系o-xyz的建立方法为:
[0127]
原点o为地面场景中心点,o点所在地球的表切面为xoy平面,z轴垂直于xoy平面指向地球表面外法线方向,y轴为接收平台运动速度在xoy平面的投影方向,x轴由右手定则确定。
[0128]
如图2所示,弹载双基前视sar系统的空间几何关系为:
[0129]
为简化分析,认为在成像时间内,收发平台不存在水平方向的偏移量。接收平台只在yoz平面内运动,即使不在该平面内,也可以通过简单的坐标旋转和平移满足假设条件。接收平台只在yoz平面内移动;发射平台在与yoz平面夹角为ψ的平面内运动;点目标p位于地面局部坐标系o-xyz的原点o处;
[0130]
在t时刻,发射平台和接收平台的位置矢量分别为p
t
和pr,速度矢量分别为v
t
和vr,到点目标p的斜距矢量分别为r
t
和rr,入射角分别为φ
t
和φr,下标t代表发射平台,下标r代表接收平台;发射平台与接收平台视线方向的夹角β为双基角;接收平台的俯冲角为γ;v
t
和vr在地面的投影矢量分别为v
tg
和v
rg
;发射平台与接收平台的速度投影矢量之间的夹角为ψ。
[0131]
基于梯度方法分析该构型的分辨率计算方法;并结合二维分辨率的特点,分析构型参数对二维分辨率的影响规律。
[0132]
计算点目标p的地面距离向分辨率ρ
gr
;计算点目标p的地面方位向分辨率ρ
ga
;计算地面二维分辨率夹角ω;采用分辨单元面积s约束双基构型二维分辨率指标。
[0133]
点目标p的地面距离向分辨率ρ
gr
的计算方法为:
[0134]
[0135]
式中,c为光速;
[0136]
为收发双平台到点目标的距离之和r在地面方向的梯度;
[0137]
b为距离向带宽;
[0138]
地面距离向分辨率ρ
gr
的方向与的方向相同;
[0139][0140]
式中,i
x
和iy分别为x和y方向的单位矢量;
[0141]
βg为双基角的地面投影角;
[0142]
φ
t
为发射平台入射角;
[0143]
φr为发接收台入射角;
[0144]
在b、φ
t
和φr一定的条件下,βg越小,地面距离向分辨率ρ
gr
越高。
[0145]
点目标p的地面方位向分辨率ρ
ga
的计算方法为:
[0146][0147]
式中,ta为成像时间;
[0148]
为收发双平台在点目标p处的多普勒频率f在地面方向的梯
[0149]
地面方位向分辨率ρ
ga
的方向与的方向相同;
[0150][0151]
式中,i
x
和iy分别为x和y方向的单位矢量;
[0152]ipt
和i
pr
分别为发射和接收平台视线方向的单位矢量;
[0153]
λ为发射平台发射信号波长;
[0154]vt
为发射平台的速度矢量;
[0155]vr
为接收平台的速度矢量;
[0156]rt
为发射平台到点目标p的斜距矢量;
[0157]rr
为接收平台到点目标p的斜距矢量;
[0158]
g=[1 1 0]为地面投影矢量。
[0159]
地面二维分辨率夹角ω的计算方法为:
[0160][0161]
式中,为收发双平台到点目标的距离之和r在地面方向的梯度;
[0162]
为收发双平台在点目标处的多普勒频率f在地面方向的梯度。
[0163]
双基构型系统的地面二维分辨率方向的夹角一般很难一直保持正交,当其夹角过小或过大时,均无法形成二维高分辨图像。为了更好的约束双基构型二维分辨率指标,可使
用分辨单元面积s进行约束。采用分辨单元面积s约束双基构型二维分辨率指标的方法为:
[0164][0165]
式中,ρ
gr
为点目标p的地面距离向分辨率;
[0166]
ρ
ga
为点目标p的地面方位向分辨率;
[0167]
ω为地面二维分辨率夹角;
[0168]
由上式可以看出,当地面二维分辨率夹角ω为90度时,分辨单元面积s最小,对应的sar图像的效果最优。
[0169]
利用弹载双基构型进行末制导前视成像时,采用远端发射近端接收的模式,发射弹处于滑翔飞行段,接收弹处于俯冲攻击段(为了简化分析,这里不考虑载荷和同步问题)。由于接收弹距离目标较近且要保持对目标的前视稳定跟踪,无法进行大方向机动,只能通过合理设计发射弹的位置和速度方向来实现最优的sar图像质量。在实际应用中,发射平台的高度、速度大小以及与场景中心目标的距离通常根据实际作战情况决定,可以认为是已知量。弹载双基前视sar系统的空间几何关系可以简化为对双基角的地面投影角βg和发射平台与接收平台速度矢量地面投影角ψ的优化。
[0170]
建立发射平台的地面多普勒分量表达式;建立接收平台的地面多普勒分量表达式;则收发双平台在点目标p处的多普勒频率f在地面方向的梯度为
[0171]
实际作战应用过程中,总是希望在最短的成像时间内达到系统指标要求的分辨率。在该约束下,通过建立βg和ψ的几何关系,实现弹载双基前视sar构型设计参数的降维处理。接下来,在成像时间最小的条件下,约束条件我们对βg和ψ的关系进行推导。
[0172]
其中,发射平台的地面多普勒分量表达式为:
[0173][0174]
式中,λ为发射平台发射信号波长;
[0175]vt
为发射平台的速度矢量;
[0176]ipt
为发射平台视线方向的单位矢量;
[0177]rt
为发射平台到点目标p的斜距矢量;
[0178]
为发射平台的地面多普勒分量的x轴分量;
[0179]
为发射平台的地面多普勒分量的y轴分量;
[0180][0181]
式中,v
t
为发射平台的速度矢量;
[0182]rt
为发射平台到点目标p的斜距矢量;
[0183]
φ
t
为发射平台的入射角;
[0184]
βg为双基角的地面投影角;
[0185]
ψ为发射平台与接收平台速度矢量地面投影角。
[0186]
接收平台的地面多普勒分量表达式为:
[0187][0188]
式中,λ为发射平台发射信号波长;
[0189]vr
为接收平台的速度矢量;
[0190]rr
为接收平台到点目标p的斜距矢量;
[0191]ipr
为接收平台视线方向的单位矢量;
[0192]
g=[1 1 0]为地面投影矢量;
[0193]
γ为接收平台的俯冲角;
[0194]
φr为接收平台的入射角。
[0195]
设定关于双基角的地面投影角βg的第一参数a(βg)、第二参数b(βg)、第三参数c(βg);设定第四参数d;并用第一参数a(βg)、第二参数b(βg)、第三参数c(βg)、第四参数d表示收发双平台在点目标p处的多普勒频率f在地面方向的梯度
[0196]
第一参数a(βg)、第二参数b(βg)、第三参数c(βg)、第四参数d分别为:
[0197][0198]
式中,λ为发射平台发射信号波长;
[0199]vt
为发射平台的速度矢量;
[0200]
φ
t
为发射平台的入射角;
[0201]
βg为双基角的地面投影角;
[0202]rt
为发射平台到点目标p的斜距矢量;
[0203]vr
为接收平台的速度矢量;
[0204]rr
为接收平台到点目标p的斜距矢量;
[0205]
γ为接收平台的俯冲角;
[0206]
φr为接收平台的入射角;
[0207]
表示为:
[0208][0209]
式中,βg为双基角的地面投影角;
[0210]
ψ为发射平台与接收平台速度矢量地面投影角;
[0211]
为发射平台的地面多普勒分量;
[0212]
为接收平台的地面多普勒分量;
[0213]
上标t表示转置。
[0214]
当双基角的地面投影角βg一定时,收发双平台到点目标p的距离之和r在地面方向的梯度的大小和方向一定,即点目标p的地面距离向分辨率ρ
gr
的大小一定;为了使二维分辨单元面积最小,应使在地面垂直方向的投影最大。
[0215]
计算地面垂直方向的单位矢量计算在方向上的投影f。
[0216]
地面垂直方向的单位矢量的计算方法为:
[0217][0218]
式中,e(βg)为设定的关于双基角的地面投影角βg的第五参数;
[0219]
f(βg)为设定的关于双基角的地面投影角βg的第六参数;
[0220][0221]
式中,φ
t
为发射平台的入射角;
[0222]
βg为双基角的地面投影角;
[0223]
φr为接收平台的入射角。
[0224]
在方向上的投影f的计算方法为:
[0225][0226]
式中,βg为双基角的地面投影角;
[0227]
ψ为发射平台与接收平台速度矢量地面投影角;
[0228]
d为设定的第四参数;
[0229]
a为第一中间量;
[0230]
b为第二中间量;
[0231][0232]
由上述分析可知,当双基角的地面投影角βg一定时,计算使投影f值最大的ψ值,记为ψ
op
t;并在所有满足系统分辨率指标的(βg,ψ
opt
)对应的成像时间中找到成像时间最小对应的系统分辨率指标的(βg,ψ
opt
),确定最终的发射平台的位置和速度方向,完成参数优化设计。
[0233]
使投影f值最大的ψ
opt
的计算方法为:
[0234]
当d
·
f(βg)≥0,且ψ
opt
=π/2-α+2nπ时,投影f的最大值
[0235]
当d
·
f(βg)<0,且ψ
opt
=3π2-α+2nπ时,
[0236]
投影f的最大值
[0237]
其中,n为整数;
[0238]
α为角度参数;且α满足
[0239]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1