一种地层应力场和位移场控制试验装置及方法
1.本发明涉及土木工程试验技术领域,尤其涉及一种地层应力场和位移场控制试验装置及方法。
背景技术:
2.地下结构在全生命期内可能遭受设计阶段难以考虑的多种荷载作用,如近接工程建设荷载、隧道纵向不均匀沉降、地震等。其中,近接工程建设荷载指近接基坑开挖、近接盾构掘进等工程建设对既有地下结构施加的附加水土压力,该荷载主要来源于地应力场的改变;隧道纵向不均匀沉降主要源于隧道下卧地层的非均匀变形,即地层位移场的非均匀变化;地震荷载会导致地层沿深度方向发生不均匀变形,通过改变地层位移场的方式对地下结构施加附加荷载作用。总之,这些荷载均以改变地层应力场或位移场的方式对地下结构施加荷载作用,易导致混凝土开裂、接头张开、渗漏水等地下结构病害问题,甚至导致主要承力构件破坏、引发整体结构倒塌等严重后果。因此,有必要通过模型试验模拟地层应力场和位移场的变化,获取地下结构的力学响应规律和损伤演化规律,并依据试验结果制定结构安全提升措施,保障地下结构全生命周期安全。
3.目前,大尺度地层-结构模型试验装置是实现地层应力场或位移场控制的有效手段。在应力场控制方面,通常采用真三轴加载的方式模拟隧道三维地应力场,即在三个方向上布置若干千斤顶进行同步加载;在位移场控制方面,通常采用层状剪切箱模拟二维地层位移场,即在竖直方向上布置若干作动器以分层控制地层水平位移。
4.为了评估地下结构全生命周期内的安全性,有必要模拟近接工程建设荷载、隧道纵向不均匀沉降、地震等多种荷载的单一或组合加载工况,这就要求装置具备自由切换应力场和位移场控制模式的功能。然而,由于研究目的不同,上述两类装置通常仅具备应力场控制或位移场控制中的一种能力,尚不能满足组合加载工况的试验需求。因此,亟需一种能自由切换应力场和位移场控制模式的大尺度地层-结构模型试验装置,以同时满足研究近接工程建设荷载、隧道纵向不均匀沉降、地震等多种荷载作用下地下结构的力学响应规律和损伤演化规律的试验需求,并依据试验结果制定结构安全提升措施,进而保障地下结构的全生命周期安全。
技术实现要素:
5.本发明公开了一种地层应力场和位移场控制试验装置及方法,其通过实现应力场和位移场控制模式的自由切换,满足研究近接工程建设荷载、隧道纵向不均匀沉降、地震等多种荷载作用下地下结构的力学响应规律和损伤演化规律的试验需求,从而可以有效解决背景技术中涉及的技术问题。
6.为实现上述目的,本发明的技术方案为:一种地层应力场和位移场控制试验装置,包括导轨装置、模型箱、加载框架、模型箱吊装装置以及控制系统,所述导轨装置包括安装于所述加载框架内部并可上下升降的升
降导轨和安装于所述加载框架外部并可与所述升降导轨相连接的固定导轨,所述模型箱吊装装置与所述导轨装置配合以用于将所述模型箱拉进或者拉出所述加载框架,其中,所述模型箱包括箱体、安装于所述箱体的传力装置以及安装于所述箱体底部并沿所述导轨装置滚动的滚轮,所述箱体包括顶板、与顶板相对并间隔设置的底板以及连接所述顶板和所述底板的侧板,所述侧板包括前侧板、与所述前侧板相对并间隔设置的后侧板以及连接所述前侧板和所述后侧板并相对间隔设置的左侧板和右侧板,所述顶板、所述左侧板和所述右侧板上均贯穿设有用于装配所述传力装置的加载孔,左、右侧板上的部分加载孔沿箱体轴线等距布置,且左、右侧板上剩余的加载孔靠近前侧板端按矩阵形式等距布置,所述前侧板和后侧板上设有可拆卸圆门;所述加载框架包括承载架、主横梁以及作动器,所述主横梁设置于所述承载架的内侧表面,所述作动器安装于所述主横梁上并与所述传力装置配合以用于对所述传力装置施加作用力;所述控制系统与所述作动器连接以对所述作动器的力或位移进行控制。
7.作为本发明的一种优选改进,所述传力装置包括插设于所述加载孔内的传力杆和固设于所述传力杆并位于所述箱体内的加载板。
8.作为本发明的一种优选改进,所述顶板的底面沿相对两侧的长边方向设有用于引导传力装置运动和避免传力装置间相互干涉的导向梁。
9.作为本发明的一种优选改进,所述传力装置包括装配于所述顶板上的所述加载孔的竖向传力装置和装配于所述左侧板和所述右侧板上的加载孔的水平传力装置,所述作动器包括与所述竖向传力装置配合的竖向作动器和与所述水平传力装置配合的水平作动器。
10.作为本发明的一种优选改进,所述模型箱还包括安装于所述箱体内并用于保证土体在前后方向上不发生侧向变形的隔断装置,所述隔断装置包括隔断板、顶推板和连接所述隔断板和所述顶推板的顶推杆,所述隔断板与左侧板、右侧板以及底板相连,所述顶推板安装于所述后侧板的内侧壁上。
11.作为本发明的一种优选改进,所述升降导轨包括可升降的导轨梁和驱动所述导轨梁升降的升降缸,所述控制系统与所述升降缸连接以对所述升降缸进行控制。
12.作为本发明的一种优选改进,所述模型箱吊装装置包括安装于所述固定导轨末端的前吊装装置和安装于所述承载架外侧的后吊装装置。
13.作为本发明的一种优选改进,所述前吊装装置和所述后吊装装置均包括两个与固定导轨或承载架连接的l型支撑杆和位于两个所述l型支撑杆之间并用于安装手拉葫芦的吊装杆。
14.本发明还提供了一种基于所述的地层应力场和位移场控制试验装置的试验方法,该试验方法应用于纵断面工况下的单一加载试验,包括如下步骤:步骤一、通过控制系统将升降导轨完全升起,使用安装于前吊装装置的手拉葫芦将模型箱拉至固定导轨的定位块;步骤二、分别将前、后侧板上的可拆卸的圆门和顶板打开;步骤三、打开左、右侧板上沿箱体轴线布置的加载孔,使用密封圆盖密封其余加载孔;步骤四、在未密封的加载孔处安装水平传力装置,同时在主横梁上安装与水平传
力装置相配合的水平作动器;步骤五、将土体和地下结构缩尺模型和相关的传感器埋入箱体内,直至土体填埋至与导向梁底面齐平,传感器导线从前侧板和后侧板的圆门引出;步骤六、在土体表面放置橡胶传力垫,再安装顶板;步骤七、使用安装于后吊装装置的手拉葫芦将模型箱拉至升降导轨的定位块,再完全降下升降导轨,使得模型箱完全处于加载框架内部;步骤八、连接作动器与传力装置的传力杆;步骤九、打开电液伺服油源、冷却系统和控制系统;步骤十、指定试验装置的水平加载方向为实际地应力场的竖向方向,竖向加载方向为实际地应力场的水平方向;步骤十一、根据模型边界上的初始地应力分布,在控制软件中将所有作动器设置为力控制模式,并指定每个作动器的目标力和加载时间;步骤十二、启动力加载,同时采集试验数据,直至初始地应力加载阶段完成;步骤十三、在控制软件中将水平作动器切换为位移控制模式,根据模型边界上的地层沉降曲线,指定水平作动器的目标位移大小和加载时间,同时保持竖向作动器为力控制模型,且力的大小不变;步骤十四、启动位移加载,同时采集试验数据,直至隧道纵向不均匀沉降加载阶段完成;步骤十五、将所有作动器的力和位移归零,待作动器稳定后,关闭电液伺服油源、冷却系统和控制系统,解除作动器与传力杆的连接;步骤十六、将升降导轨完全升起,再使用安装于前吊装装置的手拉葫芦将模型箱拉至固定导轨的定位块,此时模型箱完全移出加载框架;步骤十七、打开顶板,先后移出橡胶传力垫、土体和地下结构缩尺模型;步骤十八、将顶板和可拆卸圆门关闭,试验完毕。
15.本发明还提供了一种基于所述的地层应力场和位移场控制试验装置的试验方法,该试验方法应用于横断面工况下的组合加载试验,包括如下步骤:步骤一、通过控制系统将升降导轨完全升起,使用安装于前吊装装置的手拉葫芦将模型箱拉至固定导轨的定位块;步骤二、分别将前侧板的可拆卸圆门和顶板打开;步骤三、打开左、右侧板上按矩阵形式等距布置的加载孔,使用密封圆盖密封其余加载孔;步骤四、在未密封的加载孔处安装水平传力装置,同时在主横梁上安装与水平传力装置相配合的水平作动器;步骤五、在箱体内安装隔断装置;步骤六、将土体和地下结构缩尺模型和相关的传感器埋入前侧板与隔断板间的箱体空间内,直至土体填埋至与导向梁底面齐平,传感器的导线均从前侧板的圆门引出;步骤七、在土体表面放置橡胶传力垫,再安装顶板;步骤八、使用安装于后吊装装置的手拉葫芦将模型箱拉至升降导轨的定位块,再完全降下升降导轨,使得模型箱完全处于加载框架内部;
步骤九、连接作动器与传力杆;步骤十、打开电液伺服油源、冷却系统和控制系统;步骤十一、指定试验装置水平加载方向为实际地应力场的水平方向,竖向加载方向为实际地应力场的竖向方向;步骤十二、根据模型边界上的初始地应力分布,在控制软件中将所有作动器设置为力控制模式,并指定每个作动器的目标力和加载时间;步骤十三、启动力加载,同时采集试验数据,直至初始地应力加载阶段完成;步骤十四、根据基坑开挖卸载后的地应力分布,在控制软件中指定卸载后每个作动器的目标力大小和加载时间;步骤十五、启动力加载,同时采集试验数据,直至基坑开挖卸载阶段完成;步骤十六、在控制软件中将水平作动器切换为位移控制模式,根据模型边界上地震引起的最大地层水平位移曲线,指定水平作动器的目标位移大小和加载时间,同时保持竖向作动器为力控制模型,且力的大小不变;步骤十七、启动位移加载,同时采集试验数据,直至地震荷载加载阶段完成;步骤十八、将所有作动器的力和位移归零,待作动器稳定后,关闭电液伺服油源、冷却系统和控制系统,解除作动器与传力杆的连接;步骤十九、将升降导轨完全升起,再采用安装于前吊装装置的手拉葫芦将模型箱拉至固定导轨的定位块,此时模型箱完全移出加载框架;步骤二十、打开顶板,先后移出橡胶传力垫、土体和地下结构缩尺模型;步骤二十一、将顶板、可拆卸圆门关闭,试验完毕。
16.本发明的有益效果如下:1、实现通过控制系统切换作动器的力和位移控制,实现应力场和位移场控制模式的自由切换,可用于开展横断面或纵断面工况下的单一加载试验或组合加载试验,适用于模拟近接工程建设荷载、隧道纵向不均匀沉降、地震等多种荷载作用,从而研究多种荷载作用下地下结构的力学响应规律和损伤演化规律;2、能通过装卸隔断装置及改变传力装置和作动器的布置方式,实现横断面工况模式和纵断面工况模式的切换,从而开展横断面或纵断面工况下的单一加载试验或组合加载试验。
附图说明
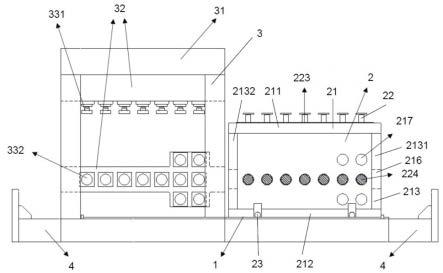
17.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:图1是本发明地层应力场和位移场控制试验装置在纵断面工况模式下的整体结构侧面示意图;图2是本发明地层应力场和位移场控制试验装置在纵断面工况模式下的整体结构正面示意图;图3是本发明地层应力场和位移场控制试验装置在横断面工况模式下的整体结构
侧面示意图;图4是本发明地层应力场和位移场控制试验装置在横断面工况模式下的整体结构正面示意图;图5是本发明纵断面工况模式下模型箱外部结构示意图;图6是本发明纵断面工况模式下模型箱内部结构示意图;图7是本发明横断面工况模式下模型箱外部结构示意图;图8是本发明横断面工况模式下模型箱内部结构示意图;图9是本发明导轨装置结构示意图;图10是本发明液压系统结构框架图;图11是本发明控制系统结构框架图;图12是本发明隔断装置结构示意图;图13(a)和 13 (b)分别是本发明模型箱吊装装置的侧视结构示意图和正视结构示意图。
具体实施方式
18.下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
19.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
20.另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
21.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
22.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
23.请参阅图1-8所示,本发明提供了一种地层应力场和位移场控制试验装置,包括导轨装置1、模型箱2、加载框架3、模型箱吊装装置4以及控制系统,再结合图9所示,所述导轨装置1包括安装于所述加载框架3内部并可上下升降的升降导轨11和安装于所述加载框架3外部并可与所述升降导轨11相连接的固定导轨12,所述升降导轨11和所述固定导轨12的末端均设有定位块110,通过该定位块110来确保所述模型箱2在所述加载框架3内外的位置正
确。
24.具体的,所述升降导轨11包括可升降的导轨梁111和驱动所述导轨梁111升降的升降缸112,所述控制系统与所述升降缸112连接以对所述升降缸112进行控制,实现对所述导轨梁111的升降控制,这样,当所述导轨梁111升起时,与所述固定导轨12相连,用于将所述模型箱2运送至所述加载框架3内;当所述导轨梁111降下时,与所述固定导轨12脱开,期间,所述模型箱2随所述导轨梁111一同降下,当所述导轨梁111完全降下后,所述模型箱2由所述加载框架3支撑而悬空,从而可以避免所述模型箱2在加载过程中的滑动。
25.所述模型箱2包括箱体21、安装于所述箱体21的传力装置22以及安装于所述箱体21底部并沿所述导轨装置1滚动的滚轮23。
26.所述箱体21包括顶板211、与顶板211相对并间隔设置的底板212以及连接所述顶板211和所述底板212的侧板213,所述侧板213包括前侧板2131、与所述前侧板2131相对并间隔设置的后侧板2132以及连接所述前侧板2131和所述后侧板2132并相对间隔设置的左侧板2133和右侧板2134。
27.所述顶板211的底面沿相对两侧的长边方向设有用于引导传力装置22运动和避免传力装置22间相互干涉的导向梁214。
28.所述顶板211、所述左侧板2133和所述右侧板2134上均贯穿设有用于装配所述传力装置22的加载孔215,所述加载孔215还配套有密封圆盖217。左、右侧板上的部分加载孔215沿箱体21轴线等距布置且左、右侧板上剩余的加载孔靠近前侧板2131端按矩阵形式等距布置。具体的,用于横断面工况模式的加载孔215在靠近前侧板端按矩阵形式等距布置,用于纵断面工况模式的加载孔215沿箱体轴线等距布置。
29.具体的,所述传力装置22包括插设于所述加载孔215内的传力杆221和固设于所述传力杆221并位于所述箱体21内的加载板222。进一步的,所述传力装置22包括装配于所述顶板211上的所述加载孔215的竖向传力装置223和装配于所述左侧板2133和所述右侧板2134上的加载孔215的水平传力装置224。
30.所述水平传力装置224的加载板222可分为大尺寸水平加载板和小尺寸水平加载板,分别用于纵断面工况模式和横断面工况模式。所述竖向传力装置223的加载板222与所述导向梁214通过滑轮接触,所述水平传力装置224的加载板222与所述导向梁214的底面留有间隙。
31.进一步的,所述竖向传力装置223、所述导向梁214以及所述顶板211一体化设置,便于所述顶板211的安装和拆卸。
32.进一步的,所述水平传力装置224的传力杆221和加载板222采用可拆卸设计,便于不同工况模式的切换。
33.进一步的,所述前侧板2131和后侧板2132上设有可拆卸圆门216,可用于直接观测所述箱体21内的模型状况以避免危险情况发生。
34.再结合图12所示,所述模型箱2还包括安装于所述箱体21内并用于保证土体在前后方向上不发生侧向变形的隔断装置,即确保模型处于平面应变状态。所述隔断装置包括隔断板251、顶推板252和连接所述隔断板251和所述顶推板252的顶推杆253,所述隔断板251与左侧板2133、右侧板2134以及底板212相连,所述顶推板252安装于所述后侧板2132的内侧壁上。
35.需进一步说明的是,隔断装置未安装时,试验装置处于纵断面工况模式,此时箱体21内所有空间均用于填筑地层-结构模型;安装时,试验装置处于横断面工况模式,此时箱体21内仅靠近前侧板2131的部分空间用于填筑地层-结构模型。
36.实际上,为了使得力均匀传递给土体7,在土体7表面与竖向传力装置223的加载板222之间还设有橡胶传力垫225,宽度略小于两个导向梁214的水平间隔,厚度和长度在纵断面工况模式下与箱体21内长度一致,在横断面工况模式下与前侧板2131内壁到隔断板251内壁距离一致。
37.所述加载框架3包括承载架31、主横梁32以及作动器33,所述主横梁32设置于所述承载架31的内侧表面,具体的,所述主横梁32数量为三个,其中,一根所述主横梁32固设于所述承载架31的顶壁的底面,剩余的两根所述主横梁32平行间隔设置且分设于所述承载架31的两相对侧壁的内侧面,所述升降导轨11安装于所述承载架31的底部,这样,当所述升降导轨11完全降下后,所述模型箱2由该承载架31支撑,所述模型箱2底部的所述滚轮23悬空,从而避免模型箱2在加载过程中滑动。
38.所述作动器33安装于所述主横梁32上并与所述传力装置22配合以用于对所述传力装置22施加作用力。具体的,所述作动器33包括与所述竖向传力装置223配合的竖向作动器331和与所述水平传力装置224配合的水平作动器332。也可解释为,将与所述承载架31的左、右侧壁垂直的作动器33称为水平作动器332,将与顶壁垂直的作动器33称为竖向作动器331。
39.进一步的,所述作动器33安装在所述主横梁32上后,与模型箱2的加载孔215均一一同心对应,并通过传力杆221与模型箱2内部的加载板222连接,从而保证作动器33与加载板222的合力作用点和方向一致。
40.需进一步说明的是,所述水平作动器332可根据工况模式更换安装位置。承载框架3为自反力结构,所有作动器33施加的力均被框架的内力平衡,地面仅承载设备自重。
41.再结合图13(a)和(b)所示,所述模型箱吊装装置4包括安装于所述固定导轨12末端的前吊装装置和安装于所述承载架31外侧的后吊装装置。所述前吊装装置和所述后吊装装置均包括两个与固定导轨12或承载架31连接的l型支撑杆41和位于两个所述l型支撑杆41之间并用于安装手拉葫芦的吊装杆42。所述模型箱吊装装置4通过手拉葫芦与所述导轨装置配合以用于将所述模型箱2拉进或者拉出所述加载框架3。
42.所述手拉葫芦通过铁链、吊钩、卸扣与模型箱2连接。安装于前吊装装置的手拉葫芦用于将模型箱2拉出加载框架3,安装于后吊装装置的手拉葫芦用于将模型箱2拉进加载框架3。
43.再结合图11所示,本发明提供的试验装置还包括液压系统,所述液压系统包括电液伺服油源61、冷却系统62、分油器63以及液压管路64。所述电液伺服油源61为作动器33提供动力油。所述冷却系统62与所述电液伺服油源61连接,用于控制油温在合适的温度范围。所述电液伺服油源61和冷却系统62的安装和存放均在室内,便于养护和维修。所述分油器63用于建立电液伺服油源61与作动器33之间的联系,提供对油源输出流量和压力的独立控制,适应每个作动器33不同的运行需求。所述液压管路64将电液伺服油源61、分油器63及作动器33联系在一起,具备承受高压的能力。
44.再结合图10所示,所述控制系统与所述作动器33连接以对所述作动器33的力或位
移进行控制。具体的,所述控制系统包括安装有控制软件的计算机51、多通道控制器52以及传感器53。
45.所述计算机51与多通道控制器52连接,通过控制软件对多通道控制器52下达每个作动器33的力或位移指令。多通道控制器52一方面通过控制线与分油器63连接,将计算机51指令转化为作动器33的油压,一方面通过传感器信号线与传感器53连接,实现闭环回路控制。
46.所述传感器53包括位移传感器、力传感器以及油压传感器,安装于每个作动器33上。在闭环回路控制下,所述控制系统5通过控制分油器63调整作动器33的油压使实测力或位移与计算机指令相等,从而实现作动器33的力或位移控制。因此,闭环回路控制可以实现所有作动器33的同步、异步力或位移加载。
47.具体来说,所述控制系统5可以先同时控制各个作动器33同步加载至相对应的指定力来模拟初始地应力场,再根据目标边界应力或位移分布形式,控制任意一个或多个作动器33同步或分步加载至相对应的指定力或位移值,从而实现应力场和位移场控制模式的自由切换,及对近接工程建设荷载、隧道纵向不均匀沉降、地震等多种荷载作用的模拟。
48.实施例1本发明还提供了一种基于所述的地层应力场和位移场控制试验装置的试验方法,该试验方法应用于纵断面工况下的单一加载试验,包括如下步骤:步骤一、通过控制系统5将升降导轨11完全升起,使用安装于前吊装装置的手拉葫芦将模型箱2拉至固定导轨12的定位块110;步骤二、分别将前、后侧板上的可拆卸的圆门216和顶板211打开;步骤三、打开左、右侧板上沿箱体21轴线布置的加载孔215,使用密封圆盖217密封其余加载孔215;步骤四、在未密封的加载孔215处安装水平传力装置224,同时在主横梁32上安装与水平传力装置224相配合的水平作动器332;步骤五、将土体7和地下结构缩尺模型8和相关的传感器埋入箱体21内,传感器导线从前侧板2131和后侧板2132的圆门216引出;步骤六、在土体表面放置橡胶传力垫225,再安装顶板211;步骤七、使用安装于后吊装装置的手拉葫芦将模型箱2拉至升降导轨11的定位块110,再完全降下升降导轨11,使得模型箱2完全处于加载框架3内部;步骤八、连接作动器33与传力装置22的传力杆221;步骤九、打开电液伺服油源61、冷却系统62和控制系统5;步骤十、指定试验装置的水平加载方向为实际地应力场的竖向方向,竖向加载方向为实际地应力场的水平方向;步骤十一、根据模型边界上的初始地应力分布,在控制软件中将所有作动器33设置为力控制模式,并指定每个作动器33的目标力和加载时间;步骤十二、启动力加载,同时采集试验数据,直至初始地应力加载阶段完成;步骤十三、在控制软件中将水平作动器332切换为位移控制模式,根据模型边界上的地层沉降曲线,指定水平作动器的目标位移大小和加载时间,同时保持竖向作动器331为力控制模型,且力的大小不变;
步骤十四、启动位移加载,同时采集试验数据,直至隧道纵向不均匀沉降加载阶段完成;步骤十五、将所有作动器33的力和位移归零,待作动器33稳定后,关闭电液伺服油源61、冷却系统62和控制系统5,解除作动器33与传力杆221的连接;步骤十六、将升降导轨11完全升起,再使用安装于前吊装装置的手拉葫芦将模型箱2拉至固定导轨12的定位块110,此时模型箱2完全移出加载框架3;步骤十七、打开顶板211,先后移出橡胶传力垫225、土体7和地下结构缩尺模型8;步骤十八、将顶板211和可拆卸圆门216关闭,试验完毕。
49.实施例2本发明还提供了一种基于所述的地层应力场和位移场控制试验装置的试验方法,该试验方法应用于横断面工况下的组合加载试验,包括如下步骤:步骤一、通过控制系统5将升降导轨11完全升起,使用安装于前吊装装置的手拉葫芦将模型箱2拉至固定导轨12的定位块110;步骤二、分别将前侧板的可拆卸圆门216和顶板211打开;步骤三、打开左、右侧板上按矩阵形式等距布置的加载孔215,使用密封圆盖217密封其余加载孔215;步骤四、在未密封的加载孔215处安装水平传力装置224,同时在主横梁32上安装与水平传力装置224相配合的水平作动器332;步骤五、在箱体21内安装隔断装置;步骤六、将土体7和地下结构缩尺模型8和相关的传感器埋入前侧板2131与隔断板251间的箱体21空间内,直至土体填埋至与导向梁214底面齐平,传感器53的导线均从前侧板2131的圆门216引出;步骤七、在土体表面放置橡胶传力垫225,再安装顶板211;步骤八、使用安装于后吊装装置的手拉葫芦将模型箱2拉至升降导轨11的定位块110,再完全降下升降导轨11,使得模型箱2完全处于加载框架3内部;步骤九、连接作动器33与传力杆221;步骤十、打开电液伺服油源61、冷却系统62和控制系统5;步骤十一、指定试验装置水平加载方向为实际地应力场的水平方向,竖向加载方向为实际地应力场的竖向方向;步骤十二、根据模型边界上的初始地应力分布,在控制软件中将所有作动器33设置为力控制模式,并指定每个作动器33的目标力和加载时间;步骤十三、启动力加载,同时采集试验数据,直至初始地应力加载阶段完成;步骤十四、根据基坑开挖卸载后的地应力分布,在控制软件中指定卸载后每个作动器33的目标力大小和加载时间;步骤十五、启动力加载,同时采集试验数据,直至基坑开挖卸载阶段完成;步骤十六、在控制软件中将水平作动器332切换为位移控制模式,根据模型边界上地震引起的最大地层水平位移曲线,指定水平作动器332的目标位移大小和加载时间,同时保持竖向作动器331为力控制模型,且力的大小不变;步骤十七、启动位移加载,同时采集试验数据,直至地震荷载加载阶段完成;
步骤十八、将所有作动器33的力和位移归零,待作动器33稳定后,关闭电液伺服油源61、冷却系统62和控制系统5,解除作动器33与传力杆221的连接;步骤十九、将升降导轨11完全升起,再采用安装于前吊装装置的手拉葫芦将模型箱2拉至固定导轨12的定位块110,此时模型箱2完全移出加载框架3;步骤二十、打开顶板211,先后移出橡胶传力垫225、土体7和地下结构缩尺模型8;步骤二十一、将顶板211、可拆卸圆门216关闭,试验完毕。
50.本发明的有益效果如下:1、能通过控制系统切换作动器的力和位移控制,实现应力场和位移场控制模式的自由切换,可用于开展横断面或纵断面工况下的单一加载试验或组合加载试验,适用于模拟近接工程建设荷载、隧道纵向不均匀沉降、地震等多种荷载作用,从而研究多种荷载作用下地下结构的力学响应规律和损伤演化规律;2、能通过装卸隔断装置及改变传力装置和作动器的布置方式,实现横断面工况模式和纵断面工况模式的切换,从而开展横断面或纵断面工况下的单一加载试验或组合加载试验。
51.尽管本发明的实施方案已公开如上,但并不仅仅限于说明书和实施方案中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里所示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1