一种单波束测深仪精度检测方法及装置与流程
1.本发明涉及单波束测深仪检测技术领域,具体说,本发明具体涉及一种单波束测深仪检测的技术领域。
背景技术:
2.单波束测深仪等声纳仪器是当前最为有效的水声探测设备。为保证成果质量,定期计量检测其探测性能具有重大的研究与应用价值。其中声源级、频率和波束角属于重要的声学检测指标,其检测通常需要在消声水池中进行,以避免因池壁反射所产生的反射波和直达波的叠加而影响测试精度。早在1940年和1941年,maclean和cook各自独立地提出了互易原理校准电声换能器的方法,是水下电声换能器测量技术的重大突破和奠基石。
3.缺乏可靠的量值溯源系统,目前单波束测深仪的检定主要采用水槽内横向测距代替纵向测深的方法,通过单波束测深仪实测读数与水槽的标准距离对比评定其精度。受限于水槽的尺寸及声信号的多途传播等原因,该种方法的精度检校可靠性较差,更无法实现单波束测深仪全量程范围内的精度校准。故用户只能认可单波束测深仪生产厂家“标称”的各项指标和探测能力,缺乏对单波束测深仪性能指标的科学认识。同时也缺乏对仪器装备可靠性、准确性和稳定性的准确判定,大大增加了成果的模糊度。
4.山东科技大学阳凡林等人在《海洋测绘》2015年11月第35卷第6期公布了单波束测深仪声学指标的检测方法且在2012年公开了专利单波束测深仪检测方法(专利号cn201210424830.8)分别提出了利用消声水池和精密回旋装置对单波束测深仪声学指标进行检测,利用导航用的gps天线与水槽、超大型消声水池等对内符合精度静态稳定性测试、内符合精度动态航行测试、外符合精度静态稳定性测试、外符合精度动态航行测试。但是这种测试结构复杂、测试过程繁琐,要求水槽和消声水池的体积很大,而且对精度的测量不够直接准确。
技术实现要素:
5.针对现有技术中测试结构复杂、测试过程繁琐,要求水槽和消声水池的体积很大,而且对精度的测量不够直接准确的技术问题,本发明提供了一种单波束测深仪精度检测装置,基于单波束测深仪测深原理,提出了声信号等效反射界面的概念,即在有限的深度范围内通过一定的技术手段实现全海深的测量。具体的,单波束测深仪在实际测量中发射脉冲声波遇到安装有声信号响应设备的界面(等效反射界面),响应设备接收端将该信号完全接收且不产生反射,通过响应电路对该信号进行延时和衰减处理,并由响应设备发射端将信号发回单波束测深仪。整个过程中,水声应答装置对不同深度的信号延时和衰减幅度进行精确计算,通过设定响应电路能够模拟脉冲声波全海深范围内的声波旅行时间及衰减幅度(等效深度),最终实现单波束测深仪的全海深测量。待测单波束测深仪接收到等效界面的回波信号并显示水深观测值,通过与标准的等效模拟距离对比分析,从而实现其精度检定,在单波束测深仪精度检测领域具有广泛的适用性。
6.本发明提供了一种单波束测深仪精度检测方法,所述检测方法包括如下步骤:
7.①
待测单波束开机后,选择单一频率开始工作,发射脉冲信号。
8.②
接收的标准水听器接收到单波束的发射的脉冲波后输入到水声应答器中,通过水声应答器进行处理,并由换能器进行信号转换,输出延时、衰减后的脉冲信号。
9.③
水声应答器实现触发方式、接收增益、延时时间、衰减大小的控制,并对输入信号进行处理,相应的处理结果由换能器发射。
10.④
待测单波束测深仪接收到回波信号,界面显示出测量深度,重复多次并记录计算精度。
11.本发明所用的频率是高频信号。
12.本发明所用的水声应答器显示有接收波形。
13.本发明提供的一种单波束测深仪精度检测装置,包括水槽、消声水池、水声应答器和水听器,所述水槽一端设有消声水池,消声水池开口端设有行车检测机构,行车检测机构上设有激光测距和检测单元单波束卡槽,消声水池上设有激光反射靶,消声水池中部设有水听器,消声水池远离开口端的一侧设有发射换能器,水听器和发射换能器均与水声应答器电性连接,激光反射靶到激光测距仪的距离等于检测单元单波束卡槽到发射换能器的距离。
14.本发明中,行车检测机构上部设有横向变频伺服电机,横向变频伺服电机的丝杆上套接有滑块,滑块下固定连接有支撑杆,支撑杆与横向变频伺服电机的丝杆垂直,横向支撑杆上部设有激光测距仪,支撑杆下部设有检测单元单波束卡槽,支撑杆上设有垂直角度传感器。
15.本发明中,消声水池上设有两组激光反射靶,一组激光反射靶位于发射换能器正上部,另外一组激光反射靶位于水听器正上部,水听器采用标准水听器。
16.本发明中,消声水池远离开口端的一端设有四棱锥体,四棱锥体每个面及消声水池底面和侧面均有三层,四棱锥体每个面及消声水池底面和侧面最外层外为方钢框架,四棱锥体每个面及消声水池底面和侧面最内层为消声材料层,方钢框架和消声材料层之间设有钢板层。
17.本发明中,水声应答器包括信号接收模块、信号处理模块和信号输出模块,信号接收模块采用水听器;信号处理模块通过水声应答器实现,增益调整范围为0~100db,输出衰减调整范围为0~63db,时延调整范围为0~10s;信号输出模块采用换能器。
18.本发明中,消声水池的上表面下面设有消声材料层,表面上面设有塑料板。
19.本发明中,支撑杆为丝杆,支撑杆和滑块之间设有纵向变频伺服电机。
20.本发明中,四棱锥体每个面都为两块拼接而成,四棱锥体每个面中间均采用铰链连接。
21.本发明中,消声水池的内消声材料层采用吸声尖劈。
22.本发明中,横向变频伺服电机的丝杆或者支撑杆上设有限位开关。
23.本发明的有益效果:
24.本发明提供的一种单波束测深仪精度检测装置,基于声信号等效反射界面的构建,实现了单波束测深仪在水槽有限尺寸范围内全量程精度指标的检定校准,形成了可靠的量值溯源体系,为国内声学仪器的检定校准提供了参考,在实现单波束测深仪精度检校
等领域具有广泛的适用性。
附图说明
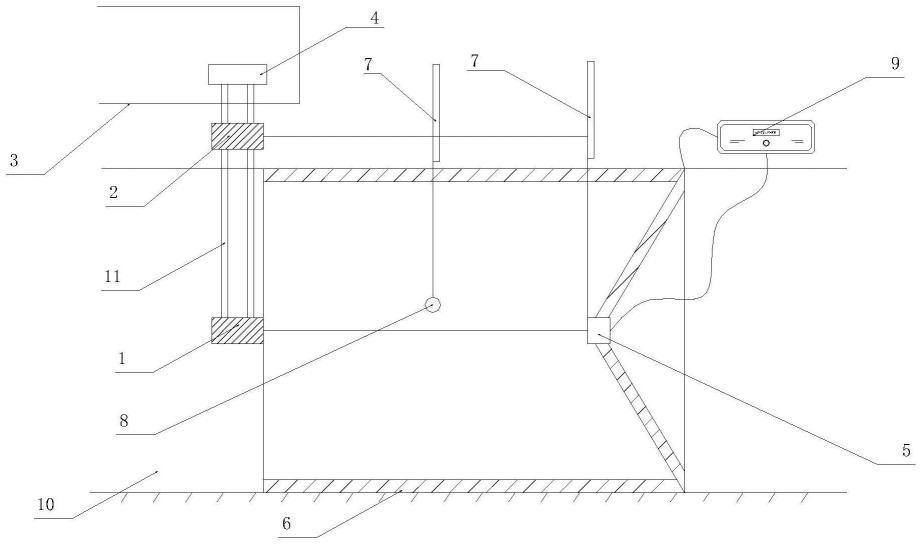
25.图1为本发明结构示意图一。
26.图2为本发明测量设计示意图。
27.图3为本发明消声水池结构示意图。
28.图4为水声应答器工作原理框图。
29.图5为消声材料层结构示意图。
30.图6为本发明结构示意图二。
31.图7为本发明测量原理示意图
32.图1-7中,1为待测单波束测深仪;2为激光测距仪;3为丝杆;4为滑块;5为换能器;6为消声材料层;7为激光反射靶;8为水听器;9为水声应答器;10为水槽;11为支撑杆。
具体实施方式
33.下面结合附图1-7和实施例对本发明的具体实施方式作进一步详细描述,但本发明的方法不限于下述实施例。
34.在本发明中,为了便于描述,对本发明中,各部件的相对位置关系的描述是根据附图1的布图方式来进行描述的,如:上、下、左、右等位置关系是依据附图1的布图方向来确定的。
35.本发明中所用到的待测单波束测深仪1、激光测距仪2、丝杆3、滑块4、发射换能器5、消声材料层6、激光反射靶7、标准水听器8、水声应答器9、变频伺服电机、限位开关、垂直角度传感器等都通过市场途径采购或者定制。激光测距仪2型号为dls-c(h)型,激光反射靶7型号为磁铁式旋转激光反射标靶phh150,水听器8型号为rhs-10标准水听器,水声应答器9型号为zijing-1,换能器5型号为model-390-series-t137型换能器。
36.实施例一:本发明单波束测深仪精度检测方法
37.本发明提供的单波束测深仪精度检测方法,包括如下步骤:
38.①
待测单波束开机后,选择单一频率开始工作,发射脉冲信号。
39.②
接收的标准水听器8接收到单波束的发射的脉冲波后输入到水声应答器9中,通过水声应答器9进行处理,并由换能器5进行信号转换,输出延时、衰减后的脉冲信号。
40.③
水声应答器9实现触发方式、接收增益、延时时间、衰减大小的控制,并对输入信号进行处理,相应的处理结果由换能器5发射。
41.④
待测单波束测深仪1接收到回波信号,界面显示出测量深度,重复多次并记录计算精度。
42.本发明所用的频率是高频信号。
43.本发明所用的水声应答器9显示有接收波形。
44.实施例二:本发明单波束测深仪精度检测装置
45.本发明提供的一种单波束测深仪精度检测装置,包括水槽10、消声水池、水声应答器9和水听器8,所述水槽10一端设有消声水池,消声水池开口端设有行车检测机构,行车检测机构上部设有激光测距仪2,行车检测机构下部设有检测单元单波束卡槽,消声水池上设
有激光反射靶7,消声水池中部设有水听器8,消声水池远离开口端的一侧设有发射换能器5,水听器8和发射换能器5均与水声应答器9电性连接,激光反射靶7到激光测距仪2的距离等于检测单元单波束卡槽到发射换能器5的距离。
46.本发明中,行车检测机构上部设有横向变频伺服电机,横向变频伺服电机的丝杆3上套接有滑块4,滑块4下固定连接有支撑杆11,支撑杆11与横向变频伺服电机的丝杆3垂直,支撑杆11上部设有激光测距仪,支撑杆11下部设有检测单元单波束卡槽,支撑杆11上设有垂直角度传感器。
47.本发明中,消声水池上设有两组激光反射靶7,一组激光反射靶7位于发射换能器5正上部,另外一组激光反射靶7位于水听器8正上部,水听器8采用标准水听器8。
48.本发明中,消声水池远离开口端的一端设有四棱锥体,四棱锥体每个面及消声水池底面和侧面均有三层,四棱锥体每个面及消声水池底面和侧面最外层外为方钢框架,四棱锥体每个面及消声水池底面和侧面最内层为消声材料层6,方钢框架和消声材料层6之间设有钢板层。
49.本发明中,水声应答器9包括信号接收模块、信号处理模块和信号输出模块,信号接收模块采用水听器8;信号处理模块通过水声应答器实现,增益调整范围为0~100db,输出衰减调整范围为0~63db,时延调整范围为0~10s;信号输出模块采用换能器5。
50.本发明中,消声水池的上表面下面设有消声材料层6,表面上面设有塑料板。
51.本发明中,支撑杆11为丝杆,支撑杆11和滑块4之间设有纵向变频伺服电机。
52.本发明中,四棱锥体每个面都为两块拼接而成,四棱锥体每个面中间均采用铰链连接。
53.本发明中,消声水池的内消声材料层6采用吸声尖劈。
54.本发明中,横向变频伺服电机的丝杆3或者支撑杆11上设有限位开关。
55.行车检测的限位开关探头分别安装在与丝杆3和支撑杆11平行的直杆上,限位开关位于控制台面上限定每次测试滑块4和测单波束测深仪1的准确位置,安装在行车中间且保证激光测距仪2和单波束探头位于同一测量起始面,通过控制行车移动及变频伺服电机工作实现设备在垂直方向和水平方向的运动,并对激光传感器的测量数据进行采集。
56.水声应答器9包括信号接收模块、信号处理模块和信号输出模块,信号接收模块采用水听器8;信号处理模块通过水声应答器9实现,增益调整范围为0~100db(2db步进),输出衰减调整范围为0~63db(1db步进),时延调整范围为0~10s(步进小于3μs);信号输出模块采用换能器5。行车检测机构水下的待测单波束测深仪探头可以完全进入消声环境内,同安装在消声环境内的水声应答器9进行同步测量。
57.消声水池尺寸为6.5m
×
5m
×
5m,选用5mm厚的消声尖辟,吸声材料的声学性能指标为频率≥20khz,平均吸声系数:≥99%。水槽10采用分体式组装,即由5块1m
×
5m
×
5m的消声框架组成,便于消声材料层6的安装和拆卸,同时保证消声环境可满足使用要求。同时为增加消声材料层6的吸声性能,根据前期消声实验结果,在声波传播方向设置四面椎体结构,通过改变声波的入射角度而增加其吸声性能。
58.检测工作时,将待测单波束测深仪安装在检测单元单波束卡槽内,保证待测单波束测深仪与激光测距仪2位于同一测量起始面。
59.实施例三:本发明单波束测深仪精度检测方法的数据处理
60.数据处理流程:水声应答器9控制软件在待测单波束测深仪量程范围内(大于其中t0为水声应答器的固定时延)设定16个等效距离作为测量点,待测单波束测深仪单点重复测量10次后取平均值,作为该段测量结果:
61.i为测量次数;
62.同时,设等效距离为di。测量结果与等效距离的差值:
[0063][0064]
根据标准差σ=a+bd,利用一元线性回归法进行计算,其中
[0065][0066][0067]
式中a—测距标准差表达式固定误差部分,mm;
[0068]
b—测距标准差表达式比例误差系数,mm/km;
[0069]
n—测量段数(取样数)。
[0070]
通过数据计算得到、的数值,从而获得标准差推广公式σ=a+bd。
[0071]
如上所述,即可较好地实现本发明,上述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1