矿物或岩石等高精度显微分析的微区取样平台及其方法
1.本发明属于矿物材料取样检测技术领域,具体涉及一种矿物或岩石等高精度显微分析的微区取样平台及其方法。
背景技术:
2.现有技术中钻取珊瑚、砗磲、石笋等岩石粉末样品时,主要是利用牙钻、金刚石刻刀进行钻(刻)取的方法。然而,这些现有取样方法存在的主要问题是:1.精度低,利用牙钻、金刚石刻刀取样,取样分辨率低,且难以操作,牙钻最高分辨率约0.5mm,刻刀最高分辨率约0.2mm,难以满足更高分辨率的取样需求;2.钻头工艺方面,目前常用的硬质合金钻头在工作时钻头磨损严重,尺寸难以达到要求且锥孔轴线的径向跳动偏大,钻体可靠性偏低,对取样精度造成消极影响;3.自动控制方面,目前的取样方式(如牙钻、刻刀),自动化程度较低,且不易掌握,需要长时间训练才能熟练操作。
3.因此,现有技术中亟需一种高效、安全、取样成本低、精度高的取样方法。同时,亟需一种与该取样方法配套的结构合理简单、易于操作、能有效提高作业效率的装置。
技术实现要素:
4.本发明的目的在于提供一种矿物或岩石等高精度显微分析的微区取样平台及其方法,操作简单、运行灵敏、运行精度高、钻头稳定性强,可以满足未来的高分辨率取样需求。
5.为实现上述目的,本发明提供如下技术方案:矿物或岩石等高精度显微分析的微区取样平台,包括支撑板、设置在支撑板上的y轴驱动机构和z轴驱动机构、设置在y轴驱动机构上方的x轴驱动机构、设置在z轴驱动机构上的钻取机构、设置在x轴驱动机构上方的载物台、设置在支撑板一侧的冷却机构、控制系统和pc上位机;
6.所述支撑板包括平行桌面设置的支撑底板、竖向设置在支撑底板一侧的支撑立板,所述支撑立板的底部为中空结构;
7.所述y轴驱动机构包括y轴驱动电机、y轴丝杠安装座、y轴丝杠和y轴移动平台,所述y轴驱动电机设置在支撑立板的中空结构内,所述y轴丝杠安装座设置在支撑底板远离y轴驱动电机的一侧,所述y轴丝杠设置在y轴丝杠安装座和y轴驱动电机之间,所述y轴移动平台滑动设置在y轴丝杠上;
8.所述z轴驱动机构包括z轴驱动电机、z轴丝杠安装座、z轴丝杠和z轴移动平台,所述z轴驱动电机设置在支撑立板的顶端,所述z轴丝杠安装座设置在支撑立板靠近底端侧,所述z轴丝杠设置在z轴驱动电机和z轴丝杠安装座之间,所述z轴移动平台滑动套设在z轴丝杠上;
9.所述x轴驱动机构包括x轴驱动电机、x轴丝杠安装座、x轴丝杠和x轴移动平台,所述x轴驱动电机和x轴丝杠安装座分别设置在y轴移动平台两端,所述x轴丝杠设置在x轴驱动电机和x轴丝杠安装座之间,所述x轴移动平台滑动设置在x轴丝杠上,所述载物台设置在
x轴移动平台上;
10.所述钻取机构包括外壳、电机、取样钻头、钻头夹,所述外壳竖直贯穿z轴移动平台的一端设置,所述电机设置在外壳的内部,所述电机的输出端与钻头夹连接,所述取样钻头固定在钻头夹内,所述钻头夹的侧壁上设有多个紧固螺栓,用于实现对取样钻头的固定;
11.所述冷却机构包括冷却泵和冷却管,所述冷却管一端与冷却泵连接,另一端设置在外壳的内部;
12.所述控制系统与x轴驱动机构、y轴驱动机构、z轴驱动机构、钻取机构、冷却机构、pc上位机分别电性连接。
13.本发明进一步的,所述x轴移动平台和载物台为长方体结构,上下相互平行设置。
14.本发明进一步的,所述x轴移动平台和载物台为圆柱体结构,所述x轴移动平台上方中心处设有转轴,所述载物台通过转轴和x轴移动平台转动连接。
15.本发明进一步的,所述载物台的侧面设有指针,所述x轴移动平台顶面设有刻度。
16.本发明进一步的,所述x轴移动平台的内部设有转动电机,所述转动电机的输出端与转轴连接。
17.本发明进一步的,所述支撑底板的底部四角设有地脚,所述地脚底部设有地垫。
18.本发明进一步的,所述支撑底板上设有两个y轴限位器,所述支撑立板上设有两个z轴限位器,所述y轴移动平台上设有两个x轴限位器,所述x轴限位器、y轴限位器、z轴限位器分别与控制系统连接。
19.本发明进一步的,所述x轴丝杠、y轴丝杠、z轴丝杠两端均设有风琴防尘罩。
20.本发明进一步的,还包括照明灯,所述照明灯设置在z轴移动平台底部取样钻头的一侧,所述z轴移动平台的侧面设有开关,所述开关与照明灯电性连接。
21.本发明进一步的,所述y轴移动平台的底部设有y轴滑轨,所述x轴移动平台的底部设有x轴滑轨,所述x轴滑轨和y轴滑轨均为分别与x轴丝杠和y轴丝杠尺寸相匹配的凹槽结构。
22.本发明另一方面的,提供矿物或岩石等高精度显微分析的微区取样方法,其步骤包括:
23.s1:开机前准备,确保平台稳定,将要钻取的样品安装在载物台上,样品安装合适后,启动电脑mach3软件,确保控制系统与pc上位机连接;
24.s2:开机,按照顺序启动仪器各部件,确保冷却泵、x轴驱动机构、y轴驱动机构、z轴驱动机构、钻取机构运转正常,显示启动画面后,调整软件控制x轴驱动机构、y轴驱动机构使得样品置于取样钻头下方,再控制z轴驱动机构使得取样钻头下降至接触样品,设为取样原点;
25.s3:取样,运行钻取机构,电机带动取样钻头高速旋转钻取样品,单次钻取完成后,取样钻头提升至初始高度,钻取的粉末样品收集至待测容器中,软件控制x轴驱动机构或y轴驱动机构移动至下一个取样点,开始下一个取样操作,即可实现连续的取样。
26.与现有技术相比,本发明的有益效果是:本发明的取样平台为微区取样提供了平稳减震的作业平台,提高了取样的精度和效率,通过x轴驱动机构、y轴驱动机构、z轴驱动机构的设置实现了对样品位置的精准调控,并通过控制系统和pc上位机实现了直观的自动化控制,提高了控制的精度,提高了取样效率,同时为科研的发展提供坚实的基础。
附图说明
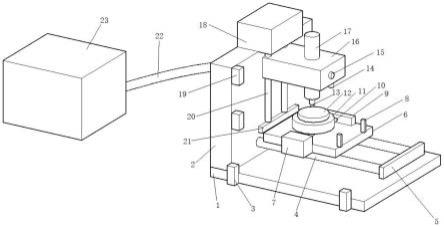
27.图1为本发明的矿物或岩石等高精度显微分析的微区取样平台的立体结构示意图;
28.图2为本发明的矿物或岩石等高精度显微分析的微区取样平台的载物台安装示意图;
29.图3为本发明的矿物或岩石等高精度显微分析的微区取样平台的风琴防尘罩结构示意图;
30.图4为本发明的矿物或岩石等高精度显微分析的微区取样平台的滑轨结构示意图;
31.图5为本发明的矿物或岩石等高精度显微分析的微区取样平台的支撑底板安装示意图;
32.图6为本发明的矿物或岩石等高精度显微分析的微区取样平台的钻取机构结构示意图;
33.图7为本发明的结构原理框图;
34.其中:1、支撑底板,2、支撑立板,3、y轴限位器,4、y轴丝杠,5、y轴丝杠安装座,6、y轴移动平台,7、x轴驱动电机,8、x轴限位器,9、x轴丝杠安装座,10、x轴丝杠,11、x轴移动平台,12、载物台,13、取样钻头,14、照明灯,15、开关,16、z轴移动平台,17、外壳,18、z轴驱动电机,19、z轴限位器,20、z轴丝杠,21、z轴丝杠安装座,22、冷却管,23、冷却泵,24、转轴,25、刻度,26、指针,27、x轴滑轨,28、风琴防尘罩,29、y轴滑轨,30、地垫,31、地脚,32、钻头夹,33、紧固螺栓。
具体实施方式
35.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
36.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
37.其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
38.实施例1:参阅图1-7,矿物或岩石等高精度显微分析的微区取样平台,包括支撑板、设置在支撑板上的y轴驱动机构和z轴驱动机构、设置在y轴驱动机构上方的x轴驱动机构、设置在z轴驱动机构上的钻取机构、设置在x轴驱动机构上方的载物台12、设置在支撑板一侧的冷却机构、控制系统和pc上位机;
39.所述支撑板包括平行桌面设置的支撑底板1、竖向设置在支撑底板1一侧的支撑立板2,所述支撑立板2的底部为中空结构,支撑底板1和支撑立板2组成l型结构;
40.所述y轴驱动机构包括y轴驱动电机、y轴丝杠安装座5、y轴丝杠4和y轴移动平台6,所述y轴驱动电机设置在支撑立板2的中空结构内,所述y轴丝杠安装座5设置在支撑底板1远离y轴驱动电机的一侧,所述y轴丝杠4设置在y轴丝杠安装座5和y轴驱动电机之间,y轴丝
杠4一端与设置在支撑立板2底部的y轴驱动电机连接,另一端与y轴丝杠安装座5活动连接,所述y轴移动平台6滑动设置在y轴丝杠4上方,通过y轴驱动电机、y轴丝杠安装座5、y轴丝杠4的设置实现y轴移动平台6在y轴方向上的水平移动;
41.所述z轴驱动机构包括z轴驱动电机18、z轴丝杠安装座21、z轴丝杠20和z轴移动平台16,所述z轴驱动电机18设置在支撑立板2的顶端,所述z轴丝杠安装座21设置在支撑立板2靠近底端侧,所述z轴丝杠20设置在z轴驱动电机18和z轴丝杠安装座21之间,所述z轴移动平台16滑动套设在z轴丝杠20上,通过z轴驱动电机18、z轴丝杠安装座21、z轴丝杠20实现z轴移动平台16在z轴方向上的移动,z轴行程100mm;
42.所述x轴驱动机构包括x轴驱动电机7、x轴丝杠安装座9、x轴丝杠10和x轴移动平台11,所述x轴驱动电机7和x轴丝杠安装座9分别设置在y轴移动平台6两端,所述x轴丝杠10设置在x轴驱动电机7和x轴丝杠安装座9之间,所述x轴移动平台11滑动设置在x轴丝杠10上,所述载物台12设置在x轴移动平台11上,通过x轴驱动电机7、x轴丝杠安装座9、x轴丝杠10的设置实现x轴移动平台11在x方向上的水平位移,同样的y轴驱动机构能带动整个x轴驱动机构和载物台12实现y轴方向上的水平移动;
43.所述钻取机构包括外壳17、电机、取样钻头13、钻头夹32,所述外壳17竖直贯穿z轴移动平台16的一端设置,所述电机设置在外壳17的内部,所述电机的输出端与钻头夹32连接,所述取样钻头13固定在钻头夹32内,所述钻头夹32的侧壁上设有多个紧固螺栓33,用于实现对取样钻头13的固定,取样钻头13采用钨钢材质;
44.所述冷却机构包括冷却泵23和冷却管22,所述冷却管22一端与冷却泵23连接,另一端设置在外壳17的内部;
45.所述控制系统与x轴驱动机构、y轴驱动机构、z轴驱动机构、钻取机构、冷却机构、pc上位机分别电性连接。
46.参阅图2,所述x轴移动平台11上方中心处设有转轴24,所述载物台12通过转轴24和x轴移动平台11转动连接,所述载物台12和x轴移动平台11均为圆柱体结构,所述载物台12的侧面设有指针26,所述x轴移动平台11顶面设有刻度25,通过转轴24的设置可以实现载物台12在水平面上360
°
旋转,适用于不同样品的取样需求,通过指针26和刻度25的设置,可以直观查看载物台12的旋转角度,确保旋转精确,进一步为了提高自动化程度,所述x轴移动平台11的内部设有转动电机,所述转动电机的输出端与转轴24连接,利用转动电机代替人工旋转。
47.参阅图5,所述支撑底板1的底部四角设有地脚31,所述地脚31底部设有地垫30,提高稳定性,为整套系统提供稳定的工作环境,提高取样的精度。
48.参阅图1,所述支撑底板1上设有两个y轴限位器3,所述支撑立板2上设有两个z轴限位器19,所述y轴移动平台6上设有两个x轴限位器8,所述x轴限位器8、y轴限位器3、z轴限位器19分别与控制系统连接,可以监控x轴驱动机构、y轴驱动机构、z轴驱动机构的行程,提高精度。
49.参阅图3,所述x轴丝杠10、y轴丝杠4、z轴丝杠20两端均设有风琴防尘罩28,可以收缩折叠,分别设置在x轴移动平台11、y轴移动平台6、z轴移动平台16两端的x轴丝杠10、y轴丝杠4、z轴丝杠20上,在x轴移动平台11、y轴移动平台6、z轴移动平台16进行移动时可以收缩,对其移动不产生阻碍,同时可以对丝杠起到保护防尘的作用,避免由于灰尘影响移动的
顺畅性。
50.参阅图1和6,还包括照明灯14,所述照明灯14设置在z轴移动平台16底部取样钻头13的一侧,所述z轴移动平台16的侧面设有开关15,所述开关15与照明灯14电性连接,通过照明灯14的设置进行光源补充,避免因采光影响取样精度。
51.参阅图2和5,所述y轴移动平台6的底部设有y轴滑轨29,所述x轴移动平台11的底部设有x轴滑轨27,所述x轴滑轨27和y轴滑轨29均为分别与x轴丝杠10和y轴丝杠4尺寸相匹配的凹槽结构。
52.提供矿物或岩石等高精度显微分析的微区取样方法,其步骤包括:
53.s1:开机前准备,确保平台稳定,将要钻取的样品安装在载物台上,样品安装合适后,启动电脑mach3软件,确保控制系统与pc上位机连接;
54.s2:开机,按照顺序启动仪器各部件,确保冷却泵、x轴驱动机构、y轴驱动机构、z轴驱动机构、钻取机构运转正常,显示启动画面后,调整软件控制x轴驱动机构、y轴驱动机构使得样品置于取样钻头下方,再控制z轴驱动机构使得取样钻头下降至接触样品,设为取样原点;
55.s3:取样,运行钻取机构,电机带动取样钻头高速旋转钻取样品,单次钻取完成后,取样钻头提升至初始高度,钻取的粉末样品收集至待测容器中,软件控制x轴驱动机构或y轴驱动机构根据设定的步长移动至下一个取样点,开始下一个取样操作,即可实现连续的取样,需要切换样品钻取角度时,转动载物台12即可实现,在取样过程中将冷却泵23打开进行冷却,避免过热造成危险或影响样品质量。
56.实施例2:本实施例与实施例1的区别在于,所述x轴移动平台11和载物台12均为长方体结构,上下相互平行设置,设置在x轴丝杠10上方,样品粘贴在载物台12上,通过x、y方向位移,实现不同位置样品采样。
57.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1