质控参数的确定方法、装置、存储介质和电子设备与流程
本发明涉及地震勘探,具体而言,涉及一种质控参数的确定方法、装置、存储介质和电子设备。
背景技术:
1、相关技术中,在海洋采集作业生产时,多应用双源枪控系统,双源为左源和右源,即两个震源,在生产过程中,通过采集左源激发产生的近场数据,质控左源气枪的激发状态,或通过采集右源激发产生的近场数据,质控右源气枪的激发状态,这种方案未考虑在左源激发的情况下,右源接收的近场数据,或者在右源激发的情况下,左源接收的近场数据信号,使得对于双源枪控系统的质控存在误差。
技术实现思路
1、本发明旨在至少解决相关技术中存在的技术问题之一。
2、为此,本发明的第一个方面在于提出一种质控参数的确定方法。
3、本发明的第二个方面在于提出一种质控参数的确定装置。
4、本发明的第三个方面在于提出一种质控参数的确定装置。
5、本发明的第四个方面在于提出一种可读存储介质。
6、本发明的第五个方面在于提出一种电子设备。
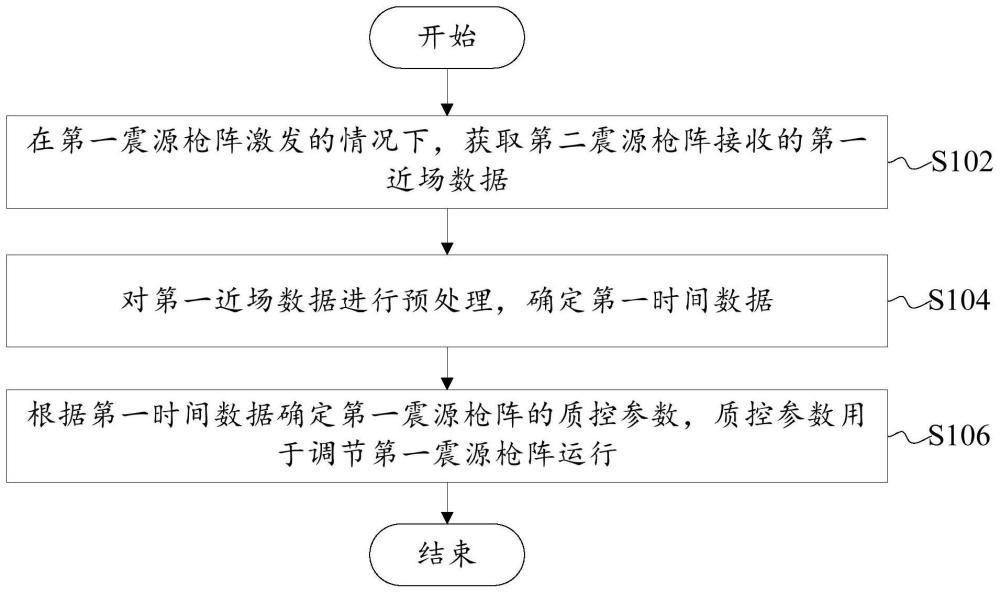
7、有鉴于此,根据本发明的一个方面,提出了一种质控参数的确定方法,该确定方法用于双源枪控系统,该双源枪控系统包括气枪枪阵,该气枪枪阵包括第一震源枪阵和第二震源枪阵,该确定方法包括:在第一震源枪阵激发的情况下,获取第二震源枪阵接收的第一近场数据;对第一近场数据进行预处理,确定第一时间数据;根据第一时间数据确定第一震源枪阵的质控参数,质控参数用于调节第一震源枪阵运行。
8、需要说明的是,本发明所提出的主要用于双源枪控系统,该质控参数的确定方法的执行主体可以是质控参数的确定装置,为了更加清楚的对本发明提出的质控参数的确定方法进行说明,下面技术方案中以质控参数的确定方法的执行主体为质控参数的确定装置进行示例性说明。
9、在该技术方案中,上述双源枪控系统为海洋地震勘探过程中应用比较广泛的系统,其主要包括气枪枪阵,气枪枪阵包括有第一震源枪阵和第二震源枪阵。
10、具体地,确定装置在第一震源枪阵被激发的情况下,获取第二震源枪阵接收的第一近场数据。具体而言,第一近场数据中记录有特征波形,特征波形包括反射波、直达波、虚反射波、折射波等信息,根据这些信息可以分析出与海洋地震勘探相关的信息,而在相关技术中,这些信息并未得到有效的应用。因此,确定装置需要在第一震源枪阵被激发的情况下,获取第一近场数据,以便与分析和处理这些信息,为后续勘探提供更多的参数支持。
11、进一步地,确定装置对上述第一近场数据进行预处理,以确出第一时间数据。具体而言,由于第一近场数据中的特征波形可能存在杂波,影响数据的分析,所以确定装置需要对第一近场数据进行预处理。
12、具体而言,确定装置通过对去除杂波后的第一近场数据的特征波形的时间信息进行提取,确定上述第一时间数据。
13、进一步地,确定装置根据上述第一时间数据确定用于调节第一震源枪阵运行的质控参数。具体而言,根据第一时间数据通过不同的计算公式可以计算出如第一震源枪阵与双源枪控系统的气枪船的距离、第一震源枪阵和第二震源枪阵接收到反射波的时间差值和第一震源枪阵与第二震源枪阵的中心点水深等质控参数,根据这些参数可以了解到第一震源枪阵运行的情况,便于在第一震源枪阵运行的异常时,及时对第一震源枪阵进行调整和维护。
14、相关技术中,对于双源枪控系统中激发的震源枪阵的质控,未考虑在第一震源枪阵激发的情况下,第二震源枪阵接收的近场数据,或者在第一震源枪阵激发的情况下,第二震源枪阵接收的近场数据,造成对于激发的震源枪阵的质控存在误差。
15、因此,在本发明的技术方案中,确定装置在第一震源枪阵被激发的情况下,获取第二震源枪阵接收的第一近场数据,并根据对第一近场数据进行预处理确定出的第一时间数据,确定出能够用于调节第一震源枪阵运行的质控参数,这样,使得对于双源枪控系统中激发的震源枪阵的质控,综合考虑了未激发的震源枪阵接收的近场数据,保证了对于双源枪控系统中激发的震源枪阵的质控的准确性,进而提升了双源枪控系统运行的稳定性。
16、此外,根据本发明的上述技术方案提出的质控参数的确定方法,还可以具有以下附加技术特征:
17、在上述技术方案中,对第一近场数据进行预处理,确定第一时间数据的步骤具体包括:采用预设模型,对第一近场数据中第二震源枪阵中多个检波器接收的特征波形的初至时刻进行拾取,以确定第一时间数据。
18、在该技术方案,上述初至时刻为第一近场数据中特征波形的起跳点的时间。
19、具体地,确定装置通过预设模型,对第一近场数据中第二震源枪阵中多个检波器接收的特征波形的初至时刻进行拾取,以确定出上述第一时间数据。
20、具体而言,上述预设模型是基于现有近场数据的特征波形的初至时刻拾取方法和成果,生成训练数据,通过人工智能技术、机器学习算法优化组合、自主特征学习,建立的适合于不同海况条件的初至时刻拾取模型。
21、具体而言,相关技术中,可通过人工智能技术或者人机交互的方式拾取地震信号,而在本发明的技术方案中,通过人工智能技术构建出了能够用于拾取近场数据中不同特征波形的初至时刻的预测模型,即将人工智能技术延伸拾取近场数据中特征波形的方案中,实现了不同特征波形初至时刻的精准拾取,使得后续步骤可以实现精准确定不同质控参数,进而精准控制双源枪控系统的功能。
22、具体而言,确定装置首先通过预设模型筛选出第一近场数据中的清晰的特征波形(即去除杂波后的波形),然后通过预设模型确定特征波形的起跳点的时间信息,并记录这些时间信息,记录的时间信息即为上述第一时间数据。
23、在该技术方案中,确定装置可以通过预先构建和训练好的预设模型,快速的对第一近场数据中的多个特征波形的初至时刻进行拾取。这样,提高了第一时间数据确定的效率和准确性。
24、在上述技术方案中,双源枪控系统还包括气枪船,质控参数包括第一震源枪阵与气枪船的距离,根据第一时间数据确定质控参数的步骤具体包括:根据第一时间数据中的第一目标时刻和第一震源枪阵的激发时刻确定第一时长;获取第一震源枪阵和第二震源枪阵的第一间距和气枪船所在区域的海水流速;根据第一时间数据、第一间距和海水流速确定第一震源枪阵与气枪船的距离。其中,第一目标时刻为第二震源枪阵中多个检波器中目标检波器对应的特征波形的初至时刻,或第二震源枪阵中多个检波器接收的特征波形的初至时刻的平均值。
25、在该技术方案中,上述双源枪控系统还包括有气枪船,上述质控参数具体为第一震源枪阵与气枪船的距离;上述第一目标时刻为第二震源枪阵中多个检波器中目标检波器接收的特征波形的初至时刻,或第二震源枪阵中多个检波器接收的特征波形的初至时刻的平均值。
26、具体地,确定装置根据上述第一时间数据确定质控参数的过程为:确定装置首先根据第一目标时刻和第一震源枪阵的激发时刻计算出第一时长。具体而言,第一时长为第一震源枪阵激发到气枪船反射后,第二震源枪阵接收到反射波的旅行时长。
27、进一步地,确定装置获取第一震源枪阵和第二震源枪阵的第一间距和气枪船所在区域的海水流速。具体而言,气枪船上设置有海水流速检测装置,确定装置可以通过该海水流速检测装置获取气枪船所在区域的海水流速,而第一震源枪阵和第二震源枪阵的第一间距一般是固定的,所以确定装置可以确定装置的存储器中直接获取。
28、进一步地,确定装置根据上述第一时长、上述第一间距和上述海水流速计算第一震源枪阵与气枪船的距离。具体而言,根据第一震源枪阵与气枪船的距离,可以判断气枪船或者第一震源枪阵的位置是否存在了异常。
29、在该技术方案中,确定装置能够根据第一时间数据确定出第一时长,确定装置根据该第一时长、第一震源枪阵和第二震源枪阵的第一间距和气枪船所在区域的海水流速,通过预先推导出的计算公式可以快速准确计算出第一震源枪阵与气枪船的距离。使得确定装置可以根据第一震源枪阵与气枪船的距离判断第一震源枪阵的位置是否存在异常,以便在位置存在异常时,及时调整第一震源枪阵的运行状态。这样,保证了双源枪控系统运行的稳定性和可靠性。
30、在上述技术方案中,质控参数包括旅行时差,旅行时差为第一震源枪阵激发后,第一震源枪阵和第二震源枪阵接收到反射波的时间差值,根据第一时间数据确定质控参数的步骤具体包括:根据第一时间数据中的第一目标时刻和第一震源枪阵的激发时刻确定第一时长;获取第一震源枪阵接收的第二近场数据;对第二近场数据中第一震源枪阵中多个检波器接收的特征波形的初至时刻进行拾取,以确定第二时间数据;根据第二时间数据中的第二目标时刻和第一震源枪阵的激发时刻确定第二时长;根据第一时长和第二时长确定旅行时差;其中,第一目标时刻为第二震源枪阵中多个检波器中目标检波器对应的特征波形的初至时刻,或第二震源枪阵中多个检波器接收的特征波形的初至时刻的平均值;第二目标时刻为第一震源枪阵中多个检波器中目标检波器对应的特征波形的初至时刻,或第一震源枪阵中多个检波器接收的特征波形的初至时刻的平均值。
31、在该技术方案中,上述质控参数具体为旅行时差,该旅行时差为第一震源枪阵激发后,第一震源枪阵和第二震源枪阵接收到反射波的时间差值;上述第一目标时刻为第二震源枪阵中多个检波器中目标检波器接收的特征波形的初至时刻,或第二震源枪阵中多个检波器接收的特征波形的初至时刻的平均值;上述第二目标时刻为第一震源枪阵中多个检波器中目标检波器对应的特征波形的初至时刻,或第一震源枪阵中多个检波器接收的特征波形的初至时刻的平均值。
32、具体地,确定装置根据上述第一时间数据确定质控参数的过程为:确定装置首先根据第一目标时刻和第一震源枪阵的激发时刻计算出第一时长。具体而言,第一时长为第一震源枪阵激发到气枪船反射后,第二震源枪阵接收到反射波的旅行时长。
33、进一步地,确定装置获取第一震源枪阵接收的第二近场数据,并对第二近场数据中多个检波器接收的特征波形的初至时刻进行拾取,以确定第二时间数据,具体而言,对第二近场数据中特征波形的初至时刻进行拾取,确定第二时间数据的具体过程与确定上述第一时间数据的步骤相同,本发明在此不再赘述。
34、进一步地,确定装置根据第二时间数据中的第二目标时刻和第一震源枪阵的激发时刻确定第二时长。具体而言,第二时长为第一震源枪阵激发到气枪船反射后,第一震源枪阵接收到反射波的旅行时长。
35、进一步地,确定装置根据上述第一时长和上述第二时长计算旅行时差,具体而言,具体而言,根据旅行时差可以判断第一震源枪阵或第二震源枪阵中的检波器是否存在异常。
36、在该技术方案中,确定装置能够根据第一时间数据确定出第一时长,能够根据对第二近场数据处理得出的第二时间数据确定第二时长,能够根据第一时长和第二时长确定上述旅行时差。使得后续步骤中确定装置可以根据旅行时差判断第一震源枪阵中的检波器是否存在异常,以便在第一震源枪阵中的检波器存在异常时,及时调整第一震源枪阵的运行状态。这样,保证了双源枪控系统运行的稳定性和可靠性。
37、在上述技术方案中,双源枪控系统还包括气枪船,质控参数包括第一震源枪阵与第二震源枪阵的中心点水深,根据第一时间数据确定质控参数的步骤具体包括:根据第一时间数据中的第三目标时刻和第一震源枪阵的激发时刻确定第三时长;获取第一震源枪阵和第二震源枪阵的第一间距、第一震源枪阵和水面的第二间距和气枪船所在区域的海水流速;根据第三时长、第一间距、第二间距和海水流速确定第一震源枪阵与第二震源枪阵的中心点的水深;其中,第三目标时刻为第二震源枪阵中多个检波器中目标检波器对应的特征波形的初至时刻,或第二震源枪阵中多个检波器接收的特征波形的初至时刻的平均值。
38、在该技术方案中,上述双源枪控系统还包括有气枪船,上述质控参数具体为第一震源枪阵与第二震源枪阵的中心点水深;上述第三目标时刻为第二震源枪阵中多个检波器中目标检波器接收的特征波形的初至时刻,或第二震源枪阵中多个检波器接收的特征波形的初至时刻的平均值。
39、具体地,确定装置根据上述第一时间数据确定质控参数的过程为:确定装置首先根据第三目标时刻和第一震源枪阵的激发时刻计算出第三时长。具体而言,第三时长为第一震源枪阵激发到第二震源枪阵反射波的旅行时长。
40、进一步地,确定装置获取第一震源枪阵和第二震源枪阵的第一间距、第一震源枪阵和水面的第二间距以及气枪船所在区域的海水流速。具体而言,气枪船上设置有海水流速检测装置,确定装置可以通过该海水流速检测装置获取气枪船所在区域的海水流速,而第一震源枪阵与第二震源枪阵的第一间距、第一震源枪阵与水面的第二间距一般是固定的,所以确定装置可以从确定装置的存储器中直接获取。
41、进一步地,确定装置根据上述第三时长、上述第一间距、上述第二间距和上述海水流速计算第一震源枪阵与第二震源枪阵的中心点水深。具体而言,根据该水深,可以判断第一震源枪阵的位置是否存在异常。
42、在该技术方案中,确定装置能够根据第一时间数据确定出第三时长,确定装置根据该第三时长、第一震源枪阵和第二震源枪阵的第一间距、第一震源枪阵与水面的第二间距和气枪船所在区域的海水流速,通过预先推导出的计算公式可以快速准确计算出第一震源枪阵与第二震源枪阵的中心点水深。使得确定装置可以根据第一震源枪阵与第二震源枪阵的中心点水深判断第一震源枪阵的位置是否存在了异常,以便在位置存在异常时,及时调整第一震源枪阵的运行状态。这样,保证了双源枪控系统运行的稳定性和可靠性。
43、在上述技术方案中,根据第一时间数据确定质控参数之后,确定方法还包括:在质控参数与理论参数值的差值大于预设阈值的情况下,确定需要对双源枪控系统进行维护。
44、在该技术方案中,上述理论参数值为双源枪控系统正常运行使该项质控参数的标准值,上述预设阈值为根据双源枪控系统设定的质控参数可以波动的最大值。
45、具体地,在确定出质控参数之后,确定装置还需要计算质控参数与理论参数值的差值,并比较该差值与预设阈值。
46、具体地,在质控参数与理论参数值的差值大于预设阈值的情况下,确定需要对双源枪控系统进行维护。具体而言,如果质控参数与理论参数值的差值大于预设阈值,则表明第一震源枪阵的位置存在异常,此时,可以确定需要对双源枪控系统进行维护。
47、在该技术方案中,确定装置可以根据质控参数和理论参数值的差值与预设阈值的大小关系确定第一震源枪阵的位置存在异常,使得在出现异常时,可以及时对双源枪控系统进行维护,保证了双源枪控系统运行的稳定性。
48、根据本发明的第二个方面,提出了一种质控参数的确定装置,该质控参数的确定装置用于双源枪控系统,该双源枪控系统包括气枪枪阵,该气枪枪阵包括第一震源枪阵和第二震源枪阵,该质控参数的确定装置包括:获取模块,用于在第一震源枪阵激发的情况下,获取第二震源枪阵接收的第一近场数据;第一处理模块,用于对第一近场数据进行预处理,确定第一时间数据;第二处理模块,根据第一时间数据确定第一震源枪阵的质控参数,质控参数为用于调节第一震源枪阵运行的参数。
49、在该技术方案中,上述双源枪控系统为海洋地震勘探过程中应用比较广泛的系统,其主要包括气枪枪阵,气枪枪阵包括有第一震源枪阵和第二震源枪阵。
50、具体地,在第一震源枪阵被激发的情况下,通过获取模块获取第二震源枪阵接收的第一近场数据。具体而言,第一近场数据中记录有特征波形,特征波形包括反射波、直达波、虚反射波、折射波等信息,根据这些信息可以分析出与海洋地震勘探相关的信息,而在相关技术中,这些信息并未得到有效的应用。因此,在第一震源枪阵被激发的情况下,需要通过获取模块获取第一近场数据,以便与分析和处理这些信息,为后续勘探提供更多的参数支持。
51、进一步地,通过第一处理模块对上述第一近场数据进行预处理,以确出第一时间数据。具体而言,由于第一近场数据中的特征波形可能存在杂波,影响数据的分析,所以需要通过第一处理模块对第一近场数据进行预处理。
52、具体而言,第一处理模块通过对去除杂波后的第一近场数据的特征波形的时间信息进行提取,确定上述第一时间数据。
53、进一步地,第二处理模块根据上述第一时间数据确定用于调节第一震源枪阵运行的质控参数。具体而言,根据第一时间数据通过不同的计算公式可以计算出如第一震源枪阵与双源枪控系统的气枪船的距离、第一震源枪阵和第二震源枪阵接收到反射波的时间差值和第一震源枪阵与第二震源枪阵的中心点水深等质控参数,根据这些参数可以了解到第一震源枪阵运行的情况,便于在第一震源枪阵运行的异常时,及时对第一震源枪阵进行调整和维护。
54、相关技术中,对于双源枪控系统中激发的震源枪阵的质控,未考虑在第一震源枪阵激发的情况下,第二震源枪阵接收的近场数据,或者在第一震源枪阵激发的情况下,第二震源枪阵接收的近场数据,造成对于激发的震源枪阵的质控存在误差。
55、因此,在本发明的技术方案中,获取模块在第一震源枪阵被激发的情况下,获取第二震源枪阵接收的第一近场数据,第一处理模块根据对第一近场数据进行预处理确定第一时间数据,第二处理模块根据第一时间数据确定用于调节第一震源枪阵运行的质控参数。这样,使得对于双源枪控系统中激发的震源枪阵的质控,综合考虑了未激发的震源枪阵接收的近场数据,保证了对于双源枪控系统中激发的震源枪阵的质控的准确性,进而提升了双源枪控系统运行的稳定性。
56、根据本发明第三方面,提出了一种质控参数的确定装置,确定装置包括:存储器,存储器中存储有程序或指令;处理器,处理器执行存储在存储器中的程序或指令以实现如本发明上述技术方案提出的质控参数的确定方法的步骤,因而具有本发明上述技术方案提出的质控参数的确定方法的全部有益技术效果,在此不再做过多赘述。
57、根据本发明的第四个方面,提出了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现如本发明上述技术方案提出的质控参数的确定方法。因此,该可读存储介质具备本发明上述技术方案提出的质控参数的确定方法的全部有益效果,在此不再赘述。
58、根据本发明的第五个方面,提出了一种电子设备,包括如本发明上述技术方案提出的质控参数的确定装置,和/或如本发明上述技术方案提出的可读存储介质,因此,该电子设备具备本发明上述技术方案提出的质控参数的确定装置和/或本发明上述技术方案提出的可读存储介质的全部有益效果,在此不再赘述。
59、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!