一种星惯组合导航设备的系统级标定方法
1.本发明涉及标定测试技术领域,尤其涉及一种星惯组合导航设备的系统级标定方法。
背景技术:
2.在星惯组合导航设备中即使是非常小的传感器误差也会导致很大的导航误差,在其投入使用前必须对其进行标定,以提高导航精度。这些误差包括星敏感器安装误差和惯组误差,其中惯组误差包括惯性器件常值误差、刻度系数误差和安装误差。
3.传统的标定方法将星敏感器安装误差和惯组误差分开标定,先对惯组误差进行标定,这要求有高精度的辅助设备,如三轴或双轴转台、大理石平板等,而后再对星敏感器安装误差标定,这使得标定效率低下,成本高昂、耗时长且惯组标定后的残差必然会影响星敏感器安装误差的标定精度。在公开的文献资料中查到了一种不同于传统的地面标定方法,《an all-parameter system-level calibration for stellar-inertial navigation system on ground》,doi:10.1109/tim.2017.2674758。该方法不需要高精度转台,节约了成本,但存在如下的局限:一是转位过程复杂且没有对参数实现最佳激励;二是对星点在星敏感器中的投影位置没有限制,这会使星敏感器安装误差标定精度降低、稳定性变差。
技术实现要素:
4.针对上述现有技术状况,本发明的目的在于提供一种星惯组合导航设备的系统级标定方法,以解决现有技术中存在的问题。
5.为实现上述目的,本发明提供一种星惯组合导航设备的系统级标定方法,所述方法实现需要设备包括一个三轴转台、两个星模拟器;两个星模拟器位于转台的侧方和上方,所述系统级误差是把所有误差参数看成是一个完整系统的一部分,通过考察系统误差参数的可辨识性估计出系统的参数,其特征在于:利用惯导输出信息以及星敏感器测量的星矢构造量测量,设计9~18次序旋转方案提高系统可观测度,使kalman滤波模型中误差参数均得到最优激励;限制星敏感器的光轴与星模拟器的光轴夹角要大于1
°
,使星敏感器安装误差标定精度更高更稳定;具体包括如下步骤:
6.具体包括如下步骤:
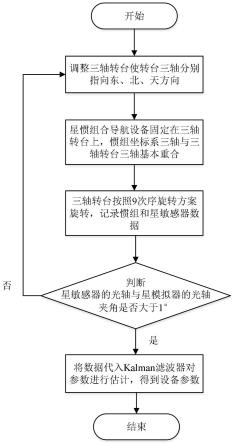
7.步骤1:调整三轴转台使转台三轴分别指向东、北、天方向,并将指向东、北、天方向的三轴分别定义为x轴、y轴、z轴,将星惯组合导航设备固定在三轴转台上,惯组坐标系三轴与三轴转台三轴基本重合,误差小于5
°
;
8.步骤2:三轴转台按照9~18次序旋转方案旋转,旋转速度5
°
~20
°
/s,每次停止时间30s~120s,星敏感器测量时,星敏感器的光轴与星模拟器的光轴夹角大于1
°
,记录星敏感器和惯性器件的测量数据;按照9次序旋转的方案为:+180
°
/y、+180
°
/x、+90
°
/y、+180
°
/z、+180
°
/y、+90
°
/z、+180
°
/x、+180
°
/z、-180
°
/x,x、y、z是旋转轴,正负号代表旋转方向,符合右手定律;
9.步骤3:将星敏感器和惯性器件的测量数据带入kalman波器中,对设备的误差进行估计。kalman滤波器的设计如下:
10.步骤3.1:首先建立如下坐标系:
11.(1)导航坐标系(n系),选东北天(enu)坐标系为导航坐系;
12.(2)imu坐标系(m系)原点位于imu质心,三轴指向惯性器件名义敏感轴的方向;
13.(3)地球坐标系(e系)原点为地心,xe轴位于赤道平面内指向零度经线方向,ze指向地轴方向,ye轴与xe、ze轴构成右手直角坐标系;
14.(4)捷联(数学)平台坐标系(p系),根据sins解算姿态确定的导航坐标系;
15.(5)星敏感器坐标系(s系)原点位于像平面的中心,zs轴垂直于焦平面,xs轴和ys轴满足右手定则;
16.步骤3.2:kalman滤波器系统状态矢量为
[0017][0018]
式中,φn=[φ
e φ
n φu]
t
为姿态失准角、δvn=[δv
e δv
n δvu]
t
为导航系下速度误差、δkg=[δk
gx δk
gy δk
gz
]
t
为陀螺仪刻度系数误差、δk
gg
=[δk
gxy δk
gxz δk
gyx δk
gyz δk
gzx δk
gzy
]
t
为陀螺仪安装误差、εm=[ε
x ε
y εz]
t
为陀螺常值漂移、δka=[δk
ax δk
ay δk
az
]
t
为加速计刻度系数误差、δk
aa
=[δk
ayx δk
azx δk
azy
]
t
为加速度计安装误差、为加速度计零位偏差,μ=[μ
x μ
y μz]
t
为星敏感器安装误差角;
[0019]
步骤3.3:系统状态方程为
[0020][0021]
状态方程由式(3)中的惯导误差模型给出
[0022][0023]
式中,为n系相对于i系的旋转角速度,为m系对于i系的旋转角速度,为m系对于i系的旋转角速度误差,为m系相对于n系的姿态阵,fn为n系内的比力,fm为m系内比力,为e系相对于i系的角速度,为e系相对于i系的角速度误差;
[0024]
步骤3.5:设re和rs分别表示星模拟器生成的星矢量在e系和s系中的单位矢量,在无误差的情况下,re在s系内的单位方向矢量rs可表示为
[0025][0026]
式中,λ、l为当地经纬度,m系与s系之间的安装矩阵关系为由于惯导解算的导航信息包含误差,所以根据sins输出的信息得到的re在s系内的单位方向矢量为
[0027][0028]
式中,为理想星敏安装矩阵,通常为单位阵;
[0029]
令将式(4)、式(5)带入舍去高阶小量得
[0030][0031]
式中,
[0032]
步骤4:将星敏感器测量得到的矢量信息与惯导解算的矢量信息相减作为量测量,其中包含了载体姿态误差、星敏安装误差等信息,则滤波量测量z1为
[0033][0034]
则此时系统量测方程为
[0035]
z1=h1x+w1ꢀꢀꢀꢀꢀꢀꢀ
(8)
[0036]
式中,h1=[m
2 03×
9 m1],03×9表示3行9列零矩阵,量测噪声w1由星敏感器的测量误差决定。
[0037]
同时将惯组解算的速度误差作为量测量z2,则量测方程为
[0038]
z2=[δv
e δv
n δvu]
t
=h2x+w2ꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0039]
式中,h2=[03×
3 i3×
3 03×9],03×3表示3行3列零矩阵,w2量测噪声。
[0040]
将量测z
l
、z2一起作系统量测,则量测方程为如下形式:
[0041]
zk=hkxk+wkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0042]
式中,本发明的上述技术方案具有如下优点:
[0043]
实现星敏感器安装误差和惯组误差的一次性标定,减少了转位次数,简化了标定流程;限制星点在星敏感器中的投影位置,使星敏感器安装误差标定精度更高更稳定。
附图说明
[0044]
图1:标定流程示意图。
具体实施方式
[0045]
本发明方法如下:
[0046]
步骤1:三轴转台连接电源,调整三轴转台使转台三轴分别指向东、北、天方向,并将指向东、北、天方向的三轴分别定义为x轴、y轴、z轴,将星惯组合导航设备固定在三轴转台上,惯组坐标系三轴与三轴转台三轴基本重合,误差小于5
°
,给惯组供电,静止5分钟使其测量更稳定。
[0047]
步骤2:三轴转台按照9次序旋转方案旋转,旋转速度15
°
/s,每次停止时间100s,星敏感器测量时,若星敏感器的光轴与星模拟器的光轴夹角小于1
°
,则调整转台初始姿态,使
星敏感器的光轴与星模拟器的光轴夹角大于1
°
,而后重新进行9次序旋转,记录星敏感器和惯性器件的测量数据。
[0048]
步骤3:设定x初值x0为30行1列零向量;kalman滤波器均方误差阵p0为30行30列矩阵,对角线元素为3.05
×
10-6
、3.05
×
10-6
、7.62
×
10-6
、1
×
10-4
、1
×
10-4
、1
×
10-4
、2.35
×
10-15
、2.35
×
10-15
、2.35
×
10-15
、2.40
×
10-7
、2.40
×
10-7
、2.40
×
10-7
、2.11
×
10-6
、2.11
×
10-6
、2.11
×
10-6
、9
×
10-10
、9
×
10-10
、9
×
10-10
、2.12
×
10-8
、2.12
×
10-8
、2.12
×
10-8
、2.12
×
10-8
、2.12
×
10-8
、2.12
×
10-8
、9
×
10-10
、9
×
10-10
、9
×
10-10
、2.12
×
10-8
、2.12
×
10-8
、2.12
×
10-8
,其余元素为0;标定位置:东经109
°8′
32
″
、北纬34
°
17
′
43
″
;惯组粗略初始姿态:俯仰角0.9272
°
、横滚角1.5691
°
、航向角3.2142
°
。以一个解算周期为例,惯导航解算的姿态、速度信息为δv=10-3
×
[0.1598 0.1933 0.0510]
t
;星敏感器测量矢量为rs=[0.128637 0.112510 0.986288]
t
,由惯导解算信息得到的矢量为,由惯导解算信息得到的矢量为z2=δv,将数据代入滤波器进行误差参数估计,而后再进行下一周期的计算。
[0049]
步骤4:重复步骤1~步骤3六次,取其估计均值。
[0050]
将本标定方法统高精度三轴转台对比,两种方法的标定结果见表1。从表1可以看出,本方法的标定的稳定性明显优于传统方法。
[0051]
表1误差参数估计值的统计特征量
[0052][0053]
采用初始对准方法对标定结果的准确性进行验证,航向角真值通过高精度摆式陀螺寻北仪给出,摆式陀螺寻北仪精度为2.8
″
(1σ),测量得到的航向角均值为1
°
12
′
27
″
,两种方法的对准结果如表2所示。
[0054]
表2对准误差
[0055] 均值(
°
)误差(
″
)传统标定方法1.2108612.1本文方法1.208443.4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1