一种波导片检测系统的制作方法
1.本发明涉及波导片检测技术领域,具体而言涉及一种波导片检测系统。
背景技术:
2.在检测光波导产品的光学性能时,需要保证光机和波导片的耦入光栅以及检测成像系统和耦出光栅的相对位置调整到合适位置。目前,这一工作通常由检测人员手工完成,对检测人员的操作技巧要求较高,而且检测人员在长时间内精细手工调节波导片的位置,劳动强度较大。
3.因此,需要一种波导片检测系统以至少部分地解决以上问题。
技术实现要素:
4.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
5.为至少部分地解决上述问题,本发明提供了一种波导片检测系统,其包括:
6.基座;
7.夹具,用于夹持波导片;
8.成像装置,用于拍摄所述波导片;
9.移动装置,所述移动装置设置至所述基座并相对于所述基座可移动,所述移动装置连接至所述夹具和所述成像装置中的至少一个,用于使所述夹具相对于所述成像装置可移动;和
10.控制装置,所述控制装置耦连至所述移动装置和所述成像装置,用于根据所述成像装置拍摄的图像控制所述移动装置移动,
11.其中,所述移动装置包括:
12.实现使所述成像装置相对于所述夹具沿z轴方向移动的z轴移动装置,
13.实现使所述成像装置相对于所述夹具沿x轴方向移动的x轴移动装置,
14.实现使所述成像装置相对于所述夹具沿y轴方向移动的y轴移动装置,和
15.实现使所述成像装置相对于所述夹具围绕平行于所述z轴方向的旋转轴线旋转的旋转装置,其中
16.所述z轴方向、所述x轴方向和所述y轴方向两两垂直,所述z轴方向平行于所述成像装置的摄像头的光轴。
17.根据本发明的波导片检测系统,能够通过电控的方法使波导片相对于成像装置在三维空间移动和旋转,从而可以将波导片调整到相对于成像装置的任意位置,降低了检测人员的劳动强度,有利于实施波导片检测。
18.可选地,所述夹具包括:
19.第一夹具,所述第一夹具连接至所述移动装置,所述第一夹具包括第一夹持部,用
于夹持未裁切的波导片;和
20.第二夹具,所述第二夹具用于夹持裁切后的波导片,所述第二夹具可拆卸地连接至所述第一夹具。
21.根据本发明的波导片检测系统,通过简单地更换夹具,既能够检测未裁切的波导片,也能够检测裁切后的波导片。
22.可选地,所述第一夹具还包括:
23.背板,所述背板包括第一侧和与所述第一侧相反的第二侧,所述第一侧朝向所述成像装置,所述第二侧连接至所述移动装置;和
24.第一安装部,所述第一安装部设置至所述第一侧,用于与所述第二夹具的第二安装部匹配,使得所述第二夹具可拆卸地连接至所述第一夹具,
25.其中,所述第一夹持部设置至所述第一侧。
26.进一步,可选地,所述第一夹持部构造为第一凹槽,并且/或者
27.所述第一安装部构造为安装孔。
28.根据本发明的波导片检测系统,波导片安装至夹具的方法简单。
29.可选地,所述第一夹具还包括第二夹持部,所述第二夹持部设置至所述背板的所述第一侧,所述第二夹持部位于所述第一安装部与所述背板之间,用于夹持遮光板。
30.根据本发明的波导片检测系统,可以在波导片后面附加遮光板,从而提高波导片在成像装置中的成像效果。
31.可选地,所述第二夹持部构造为第二凹槽。
32.根据本发明的波导片检测系统,遮光板安装至夹具的方法简单。
33.可选地,当所述未裁切的波导片放置在所述第一夹持部时,所述未裁切的波导片与所述背板的距离为第一距离d1,
34.当所述裁切后的波导片通过所述第二夹具连接至所述第一夹具时,所述裁切后的波导片与所述背板的距离为第二距离d2,
35.其中,所述夹具构造为,通过设计所述第二夹具的尺寸或调整所述第二夹具与所述背板的距离,使得所述第一距离d1等于所述第二距离d2。
36.根据本发明的波导片检测系统,在更换夹具后,仍能保证波导片与背板的距离保持不变,可以简化调整波导片相对于成像装置的位置的过程。
37.可选地,所述第二夹具包括第一夹具部和第二夹具部,所述第一夹具部与所述第二夹具部相对设置,所述第一夹具部可拆卸地连接至所述第二夹具部,以与所述第二夹具部共同夹持所述裁切后的波导片。
38.根据本发明的波导片检测系统,第二夹具结构简单,使用简便。
39.可选地,所述z轴移动装置、所述x轴移动装置和所述y轴移动装置连接至所述成像装置,所述旋转装置连接至所述夹具。
40.进一步,所述波导片检测系统还包括夹具支座,所述夹具支座设置至所述基座并相对于所述基座静止,其中,所述旋转装置设置至所述夹具支座,所述夹具连接至所述旋转装置并在所述旋转装置的驱动下相对于所述夹具支座围绕所述旋转轴线可旋转,
41.所述z轴移动装置设置至所述基座,所述z轴移动装置包括z轴移动平台,所述z轴移动平台相对于所述基座沿所述z轴方向可移动,
42.所述x轴移动装置设置至所述z轴移动平台,所述x轴移动装置包括x轴移动平台,所述x轴移动平台相对于所述z轴移动平台沿所述x轴方向可移动,
43.所述y轴移动装置设置至所述x轴移动平台,所述y轴移动装置包括y轴移动平台,所述y轴移动平台相对于所述x轴移动平台沿所述y轴方向可移动,
44.其中所述成像装置设置至所述y轴移动平台。
45.根据本发明的波导片检测系统,移动装置结构紧凑,控制方便。
46.可选地,所述z轴移动装置还包括:
47.z轴丝杠,所述z轴丝杠设置至所述基座并沿所述z轴方向延伸;
48.z轴丝杠螺母,与所述z轴丝杠匹配设置;和
49.z轴电机,设置至所述基座,所述z轴电机耦连至所述控制装置,用于驱动所述z轴丝杠旋转,
50.其中,所述z轴移动平台,连接至所述z轴丝杠螺母。
51.可选地,所述x轴移动装置还包括:
52.x轴丝杠,所述x轴丝杠设置至所述z轴移动平台并沿所述x轴方向延伸;
53.x轴丝杠螺母,与所述x轴丝杠匹配设置;和
54.x轴电机,设置至所述z轴移动平台,所述x轴电机耦连至所述控制装置,用于驱动所述x轴丝杠旋转,
55.其中,所述x轴移动平台连接至所述x轴丝杠螺母。
56.可选地,所述y轴移动装置还包括:
57.y轴丝杠,所述y轴丝杠设置至所述x轴移动平台并沿所述y轴方向延伸;
58.y轴丝杠螺母,与所述y轴丝杠匹配设置;和
59.y轴电机,设置至所述x轴移动平台,所述y轴电机耦连至所述控制装置,用于驱动所述y轴丝杠旋转,
60.其中,所述y轴移动平台连接至所述y轴丝杠螺母。
61.可选地,所述旋转装置包括旋转电机和旋转传动组件,所述旋转电机设置至所述夹具支座并耦连至所述控制装置,所述旋转传动组件连接在所述旋转电机的输出轴与所述夹具之间,使得所述夹具随所述旋转电机的所述输出轴的转动而转动。
62.根据本发明的波导片检测系统,移动装置的性能稳定、操控方便。
63.可选地,所述成像装置包括定位成像装置和检测成像装置,所述检测成像装置与所述定位成像装置的相对位置保持不变,所述波导片检测系统配置为,在所述波导片的检测过程的检测工序中完成以下步骤的工作:
64.所述控制装置控制所述z轴移动装置、所述y轴移动装置和所述x轴移动装置工作,以使所述夹具相对于所述成像装置位于第二位置p2,并且所述控制装置控制所述旋转装置工作,以使所述夹具相对于所述成像装置的旋转角度为第一角度r1;
65.所述控制装置控制所述定位成像装置拍摄待检测波导片以获得第二图片,所述控制装置根据所述第二图片控制所述旋转装置工作,使所述夹具相对于所述成像装置的旋转角度为第二角度r2;以及
66.所述控制装置控制所述定位成像装置拍摄所述待检测波导片以获得第三图片,所述控制装置根据所述第三图片控制所述z轴移动装置、所述y轴移动装置和所述x轴移动装
置工作,使所述夹具相对于所述成像装置位于第三位置p3。
67.进一步,在所述波导片的检测过程中,在所述检测工序之前还包括标定工序,所述波导片检测系统配置为,在所述标定工序中完成以下步骤的工作:
68.所述控制装置控制所述z轴移动装置、所述y轴移动装置和所述x轴移动装置工作,以使所述夹具相对于所述成像装置位于第一位置p1,并且所述控制装置控制所述旋转装置工作,以使所述夹具相对于所述成像装置的旋转角度为所述第一角度r1,使得标定波导片在所述检测成像装置中呈现期望的图像;
69.所述控制装置记录所述第一位置p1的信息和所述第一角度r1的信息;
70.所述控制装置控制所述z轴移动装置、所述y轴移动装置和所述x轴移动装置工作,使所述夹具相对于所述成像装置位于所述第二位置p2,使得所述标定波导片在所述定位成像装置中呈现期望的图像;
71.所述控制装置记录所述第二位置p2的信息;
72.所述控制装置控制所述定位成像装置拍摄所述标定波导片以获得第一图片;
73.所述控制装置分析在所述第一图片中所述标定波导片相对于基准线的第一旋转角度r1,并记录所述第一旋转角度r1的信息;以及
74.所述控制装置分析在所述第一图片中所述标定波导片的特征点的第一像素位置p1,并记录所述第一像素位置p1的信息,
75.其中,所述标定波导片的耦入光栅与耦出光栅的相对位置与所述待检测波导片的耦入光栅与耦出光栅的相对位置相同,所述基准线为所述定位成像装置的拍摄视野中的角度不变的直线。
76.在检测光波导产品的光学性能时,需要保证光机和波导片的耦入光栅以及检测成像系统和耦出光栅的相对位置调整到合适位置。由于波导片转印过程中,只能保证耦入光栅和耦出光栅之间的相对位置固定,而不能保证二者与波导片之间的相对位置不变,因此检测每一片波导片的光学性能时,都需要调整波导片的位置。根据本发明的波导片检测系统,通过成对设置检测成像装置和定位成像装置,以及在检测工序之前设置标定工序,对于同一规格的波导片,在标定工序中确定波导片的耦入光栅和耦出光栅相对于检测系统的理想位置,然后在检测工序中通过设备自动将受检波导片的耦入光栅和耦出光栅调节值该理想位置,有效保证测试结果的稳定性。并且,对于同一规格的波导片只需标定一次,有利于提高检测效率。
77.可选地,所述控制装置根据所述第二图片控制所述旋转装置工作,使所述夹具与所述成像装置的角度为第二角度r2,包括:
78.所述控制装置分析在所述第二图片中所述待检测波导片相对于所述基准线的第二旋转角度r2,所述第二角度r2为所述第一角度r1加上所述第二旋转角度r2的和再减去所述第一旋转角度r1的差。
79.可选地,所述控制装置根据所述第三图片控制所述z轴移动装置、所述y轴移动装置和所述x轴移动装置工作,使所述夹具相对于所述成像装置位于第三位置p3,包括:
80.所述控制装置分析在所述第三图片中所述待检测波导片的所述特征点的第二像素位置p2,所述控制装置根据所述第一像素位置p1和所述第二像素位置p2确定所述第三位置p3。
81.可选地,所述第一像素位置p1包括沿所述y轴方向的第一y轴坐标位置y1和沿所述x轴方向的第一x轴坐标位置x1,
82.所述第二像素位置p2包括沿所述y轴方向的第二y轴坐标位置y2和沿所述x轴方向的第二x轴坐标位置x2,
83.所述第三位置p3为从所述第一位置p1沿所述y轴方向移动第一移动距离d1并且沿所述x轴方向移动第二移动距离d2的位置,其中,
84.d1=(y2-y1)
×
a,d2=(x2-x1)
×
a,
85.其中a为一个像素对应的实际物理尺寸。
86.根据本发明的波导片检测系统,在检测工序中,波导片位置的调整基于在标定工序中所确定的理想位置,因而可以使受检波导片的耦入光栅和耦出光栅被调节至该理想位置。
87.可选地,所述特征点为所述耦出光栅的边界角的顶点;并且/或者
88.所述基准线为所述定位成像装置的拍摄视野中的横线或竖线。
89.根据本发明的波导片检测系统,特征点与基准线的选择合理,相关算法成熟,有利于保证检测结果的稳定性。
90.可选地,所述波导片相对于所述基准线的旋转角度为所述波导片的特征线与所述基准线的夹角。
91.进一步,所述特征线为所述波导片的耦出光栅的边缘。
92.根据本发明的波导片检测系统,特征线的选择合理,相关算法成熟,有利于保证检测结果的稳定性。
93.可选地,所述定位成像装置包括定位摄像头,所述定位摄像头包括远心镜头。
94.根据本发明的波导片检测系统,由于远心镜头无透视现象,图像中物体坐标不受z轴移动装置的移动误差的影响而发生变化,减小了最终的定位误差。
95.可选地,所述检测成像装置包括光机和检测摄像头,其中,所述检测摄像头的光轴与所述定位摄像头的光轴均沿所述z轴方向延伸,所述光机与所述检测摄像头的相对位置对应于所述波导片的耦入光栅与所述波导片的耦出光栅的相对位置。
96.进一步,所述检测成像装置还包括光机移动装置,用于使所述光机相对于所述检测摄像头沿所述y轴方向和所述x轴方向中的至少一个可移动。
97.根据本发明的波导片检测系统,可以调节光机与检测摄像头的相对位置,使得波导片检测系统可以检测不同型号的波导片。
附图说明
98.本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施方式及其描述,用来解释本发明的原理。
99.附图中:
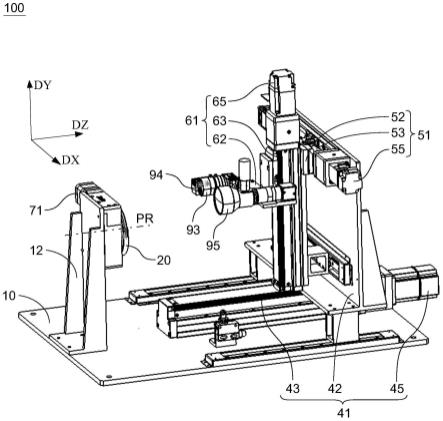
100.图1为根据本发明优选实施方式的波导片检测系统的主视立体图;
101.图2为图1所示的波导片检测系统的后视立体图;
102.图3为图1所示的波导片检测系统的第一夹具的立体图;
103.图4为图1所示的波导片检测系统的夹具夹持未裁切的波导片的示意图;
104.图5为图1所示的波导片检测系统的夹具夹持裁切后的波导片的示意图;
105.图6为图1所示的波导片检测系统的检测成像装置与波导片对准的示意图;
106.图7为图1所示的波导片检测系统检测检测波导片的标定工序中定位成像装置所拍摄的标定波导片的第一图片的示意图;
107.图8为图1所示的波导片检测系统检测检测波导片的检测工序中定位成像装置所拍摄的待检测波导片的第二图片的示意图;
108.图9为图1所示的波导片检测系统检测检测波导片的检测工序中定位成像装置所拍摄的待检测波导片的第三图片的示意图。
109.附图标记说明:
110.10:基座
111.12:夹具支座
112.20:夹具
113.21:第一夹具
114.22:背板
115.23:第一侧
116.24:第二侧
117.25:第一安装部
118.26:第一夹持部
119.27:第二夹持部
120.31:第二夹具
121.32:第一夹具部
122.33:第二夹具部
123.35:第二安装部
124.40:移动装置
125.41:z轴移动装置
126.42:z轴移动平台
127.43:z轴丝杠
128.45:z轴电机
129.51:x轴移动装置
130.52:x轴移动平台
131.53:x轴丝杠
132.55:x轴电机
133.61:y轴移动装置
134.62:y轴移动平台
135.63:y轴丝杠
136.65:y轴电机
137.71:旋转装置
138.75:旋转电机
139.80:波导片
140.81:耦入光栅
141.82:耦出光栅
142.83:特征点
143.90:成像装置
144.91:检测成像装置
145.92:定位成像装置
146.93:检测摄像头
147.94:光机
148.95:定位摄像头
149.100:波导片检测系统
150.dz:z轴方向
151.dx:x轴方向
152.dy:y轴方向
153.fl:特征线
154.pr:旋转轴线
155.rl:基准线
具体实施方式
156.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
157.为了彻底理解本发明,将在下列的描述中提出详细的描述。应当理解的是,提供这些实施方式是为了使得本发明的公开彻底且完整,并且将这些示例性实施方式的构思充分传达给本领域普通技术人员。显然,本发明实施方式的施行并不限定于本领域的技术人员所熟悉的特殊细节。本发明的较佳实施方式详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
158.应予以注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
159.本发明中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其他含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。
160.需要说明的是,本文中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明目的,并非限制。
161.本发明提供了一种波导片检测系统。
162.现在,将参照附图更详细地描述根据本发明的示例性实施方式。
163.如图1和图2所示,在优选的实施方式中,根据本发明的波导片检测系统100包括基座10、夹具20、成像装置90、移动装置40和控制装置(未示出)。其中,夹具20用于夹持波导片80。成像装置90用于拍摄波导片80,从而可以根据拍摄的图像检测波导片80的质量。移动装置40设置至基座10。移动装置40相对于基座10可移动。移动装置40连接至夹具20和成像装置90中的至少一个,用于使夹具20相对于成像装置90可移动(也即使成像装置90相对于夹具20可移动),从而使成像装置90能够对准波导片80。控制装置分别耦连至移动装置40和成像装置90,用于根据成像装置90拍摄的图像控制移动装置40移动,使成像装置90能够对准波导片80。同时,优选地,控制装置还可以分析处理成像装置90所拍摄的图像,从而鉴定波导片80的质量。
164.在本技术中,“移动”可以是平动,也可以是转动。
165.优选地,移动装置40包括实现使成像装置90相对于夹具20沿z轴方向dz移动(平动)的z轴移动装置41、实现使成像装置90相对于夹具20沿x轴方向dx移动(平动)的x轴移动装置51、实现使成像装置90相对于夹具20沿y轴方向dy移动(平动)的y轴移动装置61和实现使成像装置90相对于夹具20围绕平行于z轴方向dz的旋转轴线pr旋转(转动)的旋转装置71。其中,z轴方向dz、x轴方向dz和y轴方向dy两两垂直,z轴方向dz平行于成像装置90的摄像头的光轴。也即,z轴方向dz为成像装置90的拍摄方向,波导片80被夹具20夹持后位于垂直于或大体垂直于z轴方向dz的平面中,也即波导片80的法线平行于或大体平行于z轴方向dz。
166.z轴移动装置41、x轴移动装置51、y轴移动装置61和旋转装置71中的一个或多个连接至成像装置90,其余则连接至夹具20。或者,z轴移动装置41、x轴移动装置51、y轴移动装置61和旋转装置71全部连接至成像装置90。或者,z轴移动装置41、x轴移动装置51、y轴移动装置61和旋转装置71全部连接至夹具20。优选地,如图1和图2所示,z轴移动装置41、x轴移动装置51、y轴移动装置61连接至成像装置90,旋转装置71连接至夹具20。
167.具体地,z轴移动装置41设置至基座10。z轴移动装置包括z轴移动平台42、z轴丝杠43、z轴丝杠螺母(未示出)和z轴电机45。其中,z轴丝杠43设置至基座10,并沿z轴方向dz延伸。z轴丝杠螺母与z轴丝杠43匹配设置。z轴电机45设置至基座10。z轴电机45耦连至控制装置,用于驱动z轴丝杠43旋转。z轴移动平台42连接至z轴丝杠螺母。当z轴电机45工作时,z轴丝杠43旋转,使得z轴丝杠螺母在z轴丝杠43上沿z轴方向dz移动,从而使z轴移动平台42相对于基座10沿z轴方向dz可移动。
168.x轴移动装置51设置至z轴移动平台42。x轴移动装置51包括x轴移动平台52、x轴丝杠53、x轴丝杠螺母(未示出)和x轴电机55。其中,x轴丝杠53x设置至z轴移动平台42,并沿x轴方向dx延伸。x轴丝杠螺母与x轴丝杠53匹配设置。x轴电机55设置至z轴移动平台42。x轴电机55耦连至控制装置,用于驱动x轴丝杠53旋转。x轴移动平台52连接至x轴丝杠螺母。当x轴电机55工作时,x轴丝杠53旋转,使得x轴丝杠螺母在x轴丝杠53上沿x轴方向dx移动,使得x轴移动平台52相对于z轴移动平台42沿x轴方向dx可移动,也即使得x轴移动平台52相对于基座10沿x轴方向dx可移动。
169.y轴移动装置61设置至x轴移动平台52。y轴移动装置61包括y轴移动平台62、y轴丝杠63、y轴丝杠螺母(未示出)和y轴电机65。其中,y轴丝杠63设置至x轴移动平台52,并沿y轴方向dy延伸。y轴丝杠螺母与y轴丝杠63匹配设置。y轴电机65设置至x轴移动平台52。y轴电
机65耦连至控制装置,用于驱动y轴丝杠63旋转。y轴移动平台62连接至y轴丝杠螺母。当y轴电机65工作时,y轴丝杠63旋转,使得y轴丝杠螺母在y轴丝杠63上沿y轴方向dy移动,使得y轴移动平台62相对于x轴移动平台52沿y轴方向dy可移动,也即使得y轴移动平台62相对于z轴移动平台42沿y轴方向dy可移动,也即使得y轴移动平台62相对于基座10沿y轴方向dy可移动。
170.成像装置90设置至y轴移动平台62。因此,成像装置90相对于x轴移动平台52、z轴移动平台42和基座10沿y轴方向dy可移动。成像装置90相对于z轴移动平台42和基座10沿x轴方向dx可移动。成像装置90相对于基座10沿z轴方向dz可移动。
171.如图1和图2所示,波导片检测系统100还包括夹具支座12。夹具支座12设置至基座10并相对于基座10静止。夹具支座12也可看作是基座10的一部分。夹具20相对于基座10沿z轴方向dz静止。夹具20连接至旋转装置71并在旋转装置71的驱动下相对于夹具支座12围绕旋转轴线pr可旋转。旋转装置71设置至夹具支座12,或者说旋转装置71设置至基座10。旋转装置71包括旋转电机75和旋转传动组件(未示出)。旋转电机75设置至夹具支座12(也即基座10)并耦连至控制装置。旋转传动组件连接在旋转电机75的输出轴与夹具20之间,使得夹具20随旋转电机75的输出轴的转动而围绕旋转轴线pr相对于夹具支座12(也即基座10)转动,其中旋转轴线pr沿z轴方向dz延伸。
172.由以上介绍可知,安装有成像装置90的y轴移动平台62不会相对于基座10旋转。因此,在本发明中,旋转装置71通过构造为使得夹具20围绕平行于z轴方向dz的旋转轴线pr相对于基座10旋转实现使成像装置90相对于夹具20围绕平行于z轴方向dz的旋转轴线pr旋转。夹具20不会相对于基座10沿z轴方向dz、y轴方向dy和x轴方向dx移动。因此,在本发明中,z轴移动装置41通过构造为使得成像装置90相对于基座10沿z轴方向dz可移动实现使成像装置90相对于夹具20沿z轴方向dz可移动;x轴移动装置51通过构造为使得成像装置90相对于基座10沿x轴方向dx可移动实现使成像装置90相对于夹具20沿x轴方向dx可移动;y轴移动装置61通过构造为使得成像装置90相对于基座10沿y轴方向dy可移动实现使成像装置90相对于夹具20沿y轴方向dy可移动。
173.换句话说,在优选的实施方式中,成像装置90沿z轴方向dz、x轴方向dx和y轴方向dy相对于基座10和夹具20可平动,夹具20围绕旋转轴线pr相对于基座10和成像装置90可转动。成像装置90的平动运动决定了成像装置90与夹具20(也即波导片80)的相对位置。夹具20的转动运动决定了成型啊装置90与夹具20(也即波导片80)的相对旋转角度。
174.成像装置90相对于夹具20的位置由z轴移动装置41、x轴移动装置51和y轴移动装置61共同确定,因此成像装置90与z轴移动装置41、x轴移动装置51和y轴移动装置61均有连接关系。
175.如图3、图4和图5所示,夹具20包括第一夹具21和第二夹具31。第一夹具21连接至移动装置40。具体地,第一夹具21连接至移动装置40的旋转装置71的旋转传动组件,从而第一夹具21相对于基座10围绕旋转轴线pr可转动。第二夹具31可拆卸地连接至第一夹具21。第一夹具21用于夹持未裁切的波导片80。第二夹具用于夹持裁切后的波导片80。例如波导片80为裁切时为圆形(如图4所示),其可以应用于眼镜,因此波导片80会被裁切为眼镜片的形状(如图5所示)。因此,根据本发明的波导片检测系统100可以检测裁切前的波导片80,也可以检测裁切后的波导片80。
176.如图3和图4所示,第一夹具21包括背板22、第一夹持部26和第二夹持部27。背板22沿垂直于或大体沿垂直于z轴方向dz的平面延伸,也即背板22垂直于或大体垂直于z轴方向dz。背板22包括第一侧23和与第一侧相反的第二侧24。第一侧23朝向成像装置90。第一侧23沿垂直于或大体沿垂直于z轴方向dz的平面延伸,也即背板22的法线平行于或大体平行于z轴方向dz。第二侧24连接至移动装置40,也即连接至移动装置40的旋转装置71的旋转传动组件。第一夹持部26设置至背板22的第一侧23。第一夹持部26构造为第一凹槽,用于夹持未裁切的波导片80(将裁切的波导片80插入第一凹槽中)。第二夹持部27也设置至背板22的第一侧23,并位于第一安装部25与背板22之间,用于夹持遮光板,从而使成像装置90可以获得较好的拍摄效果。第二夹持部27构造为第二凹槽(将遮光板插入第二凹槽中)。
177.如图5所示,第二夹具31包括第一夹具部32和第二夹具部33。第一夹具部32与第二夹具部33相对设置。第一夹具部32可拆卸地连接至第二夹具部33,以与第二夹具部33共同夹持裁切后的波导片80。
178.第一夹具21还包括第一安装部25。第二夹具31还包括第二安装部35。第一安装部25设置至第一侧23,用于与第二夹具31的第二安装部35匹配,使得第二夹具31可拆卸地连接至第一夹具21。例如,第一安装部25和第二安装部35均构造为安装孔,通过螺栓将第二夹具31安装至第一夹具21。或者,第一安装部25构造为安装孔,第二安装部35在第二夹具的用于朝向第一夹具21的一侧构造为安装销,该安装销可插入该安装孔中,从而使第二夹具31安装至第一夹具21。
179.可以理解的,当波导片80安装至夹具20后,波导片80随夹具20相对于基座10同步转动,并且波导片80随夹具20相对于成像装置90同步转动。如图4和图5所示,波导片80包括耦入光栅81和耦出光栅82。对于同一款或同一型号的波导片80,其耦入光栅81与耦出光栅82的相对位置不变。
180.如图1和图2所示,成像装置90包括检测成像装置91,检测成像装置91耦连至控制装置,用于检测波导片80的性能。检测成像装置91包括光机94和检测摄像头93。光机94和检测摄像头93均耦连至控制装置。其中,检测摄像头93的光轴沿z轴方向dz延伸。光机94与检测摄像头93的相对位置和耦入光栅81与耦出光栅82的相对位置相对应,也即光机94对准耦入光栅81时检测摄像头93同时对准耦出光栅82(如图6所示)。检测时,光机94对准波导片80的耦入光栅,使光通过耦入光栅81进入波导片80。然后用户通过检测摄像头93观察耦出光栅82中的图像,从而可以分析波导片80的性能。当波导片80的型号不同时,耦入光栅81与耦出光栅82的相对位置会不同。因此,优选地,检测成像装置91还包括光机移动装置(未示出),用于使光机94相对于检测摄像头93沿y轴方向dy和x轴方向dx中的至少一个可移动,从而调节光机94与检测摄像头93的相对位置。例如,光机移动装置构造为光机移动平台,其设置至y轴移动平台62并沿y轴方向dy和x轴方向dx中的至少一个相对于y轴移动平台62可移动。检测摄像头93设置至y轴移动平台62,光机94设置至该光机移动平台,从而可以调节其与检测摄像头93的相对位置。
181.在检测光波导产品的光学性能时,需要保证光机和波导片的耦入光栅以及检测成像系统和耦出光栅的相对位置调整到合适位置,目前这个相对位置是通过人观察成像系统的图像根据经验调整的。由于波导片转印过程中,只能保证耦入光栅和耦出光栅之间的相对位置固定,而不能保证二者与波导片之间的相对位置不变,因此检测每一片波导片的光
学性能时,都需要调整波导片的位置。由于主观因素的存在,不能保证每次测量时光机和波导片的耦入光栅以及检测成像系统和耦出光栅的相对位置一致,影响测试结果的稳定性。
182.换句话说,在波导片80的转印过程中,只能保证耦入光栅81和耦出光栅82之间的相对位置固定,而不能保证二者与波导片80之间的相对位置不变,也即不能保证耦入光栅81和耦出光栅82始终位于波导片80上固定不变的位置。因此,每更换一次波导片80,都需要将光机94重新对准耦入光栅81(或者将检测摄像头93重新对准),这使得在人工操作的情况下检测操作繁琐、检测效率低下,同时人工对准的操作稳定性缺乏保障,影响检测结果的稳定性。
183.为解决这一问题,如图1和图2所示,成像装置90还包括定位成像装置92。定位成像装置92耦连至控制装置。定位成像装置92与检测成像装置91的相对位置保持不变。定位成像装置92包括定位摄像头95。其中,定位摄像头95的光轴沿z轴方向dz延伸。定位成像装置92用于在每次更换波导片80后,使波导片80的耦入光栅81和耦出光栅82的位置均被自动调节至相对于检测成像装置91的某一固定的位置(也称为检测位置),从而检测成像装置91与波导片80的相对位置始终保持不变,可以提高工作效率和检测稳定性。
184.具体地,在波导片80的检测过程中,先后包括标定工序和检测工序。在标定工序中,用户通过主观经验根据标定波导片确定出用于检测波导片80的夹具20相对于检测成像装置91的理想位置,并且控制装置记录下相关的信息。在检测工序中,控制装置根据所记录的信息自动将夹具20相对于检测成像装置91调整至该理想位置,使得每一个待检测波导片与检测成像装置91的相对位置均为该理想位置。可以理解的,标定波导片与待检测波导片为同一型号,也即标定波导片的耦入光栅与耦出光栅的相对位置与待检测波导片的耦入光栅与耦出光栅的相对位置相同。
185.首先,在标定工序中,波导片检测系统100配置为完成以下步骤的工作。
186.s11、控制装置控制移动装置40工作,使夹具20相对于成像装置90位于第一位置p1,并使夹具20相对于成像装置90的旋转角度为第一角度r1,使得作为标定波导片的波导片80(也称标定用波导片80)在检测成像装置91中呈现期望的图像。
187.在步骤s11中,先将某一型号的波导片80中的任意一个作为标定波导片,将其夹在夹具20中。用户操控控制装置使得移动装置40工作,包括控制z轴移动装置41、x轴移动装置51、y轴移动装置61和旋转装置71工作,从而调节夹具20与成像装置90的相对位置和相对角度,也即调节波导片80与成像装置90的相对位置和相对角度。具体地,用户操控控制装置使得z轴移动装置41、y轴移动装置61和x轴移动装置51工作,以使夹具20相对于成像装置90位于第一位置p1;并且用户操控控制装置使得控制装置控制旋转装置71工作,以使夹具20相对于成像装置90的旋转角度为第一角度r1。当用户在检测摄像头93所拍摄的图像中看到期望的图像时(例如,在检测摄像头93所拍摄的图像中看到清晰的预期的图像),通过控制装置控制移动装置40停止移动。此时,z轴移动装置41、x轴移动装置51和y轴移动装置61使得夹具20相对于成像装置90位于第一位置p1,旋转装置71使得夹具20相对于成像装置90的旋转角度为第一角度r1。也即,此时,z轴移动装置41、x轴移动装置51和y轴移动装置61使得波导片80相对于成像装置90位于第一位置p1,旋转装置71使的波导片80相对于成像装置90的角度为第一角度r1。在本技术中,将波导片80相对于成像装置90位于第一位置p1和第一角度r1时的耦入光栅81和耦出光栅82的相对于检测成像装置91的位置称为检测位置。可以理
解的,在本技术中,每次更换波导片80后,均要通过控制移动装置40工作使波导片80被相对于检测成像装置91移动至该检测位置。
188.例如,在本发明中,x轴方向dx的机械零点在图1中的左端,y轴方向dy的机械零点在图1中的下端,z轴方向dz的机械零点在图1中的左端。x轴方向dx、y轴方向dy和z轴方向dz的运动的坐标单位为mm。在本发明中,夹具20围绕旋转轴线pr转动的角度也称为r轴位置,用户可以设置旋转电机75的输出轴的某个旋转角度下夹具20相对于基座10的转动角度为0度。
189.例如,在步骤s11中,人工调整移动装置40使检测摄像头93与耦出光栅82以及光机94与耦入光栅81的相对位置调整到合适时(调整到p1位置和r1角度时),检测成像装置91相对于标定用波导片80位于检测位置(如图6所示,光机94对准耦入光栅81,检测摄像头93对准耦出光栅82),检测成像装置91(也即成像装置90,也即定位成像装置92)的x、y、z轴位置为(100.3,20.2,135),夹具20的r轴位置为90.5度。
190.s12、控制装置记录第一位置p1的信息和第一角度r1的信息。
191.在步骤s12中,控制装置记录第一位置p1的信息为:x轴坐标位置为100.3mm,y轴坐标位置为20.2mm,z轴坐标位置为135mm。控制装置记录第一角度r1的信息为:r轴坐标位置为90.5度。也即,优选地,将此时夹具20相对于成像装置90的第一位置p1等效为成像装置90相对于基座10的位置,将此时夹具20相对于成像装置90的第一角度r1等效为夹具20相对于基座10的角度。
192.可以理解的,由于夹具支座12相对于基座10固定,成像装置90相对于基座10的位置与成像装置90相对于夹具20的位置永远相差一恒定值,因此,可以用成像装置90相对于基座10的位置表征成像装置90相对于夹具20的位置。另一方面,成像装置90并不相对于基座10旋转,因此可以用夹具20相对于基座10的旋转角度表征夹具20相对于成像装置90的旋转角度。
193.s13、控制装置控制移动装置40工作,使夹具20相对于成像装置90位于第二位置p2,使得标定用波导片80在定位成像装置92中呈现期望的图像。
194.在步骤s13中,继标定用波导片80在检测摄像头93中呈现出期望图像后,用户通过控制装置控制移动装置40工作,使夹具20相对于成像装置90移动,使标定用波导片80在定位摄像头95中也呈现出期望的图像,具体地,用户通过控制装置控制z轴移动装置41、y轴移动装置61和x轴移动装置51工作,使夹具20于成像装置90位于第二位置p2。此时,在定位摄像头95所拍摄的图像中看到清晰的耦出光栅82的边界角(如图7所示)。例如,此时,检测成像装置91(也即成像装置90,也即定位成像装置92)的x、y、z轴位置为(150.5,15.0,100)。
195.s14、控制装置记录第二位置p2的信息。
196.在步骤s14中,控制装置记录第二位置p2的信息为:x轴坐标位置为150.5mm,y坐标位置为15.0mm,z轴坐标位置为100mm。也即,优选地,将此时成像装置90相对于基座10的位置等效为夹具20相对于成像装置90的第二位置p2。
197.s15、控制装置控制定位成像装置92拍摄标定用波导片80以获得第一图片。
198.在此步骤中,控制装置控制定位成像装置92拍摄的标定用波导片80的第一图片如图7所示。
199.s16、控制装置分析在第一图片中标定用波导片80相对于基准线rl的第一旋转角
度r1,并记录第一旋转角度r1的信息。
200.具体地,基准线rl例如为定位成像装置92的拍摄视野中的角度不变的直线,例如为定位成像装置92的拍摄视野中的横线(像素y轴坐标不变)或竖线(像素x轴坐标不变)。波导片80相对于基准线rl的旋转角度可以通过波导片80的特征线fl与基准线rl的夹角表征。例如,如图7所示,控制装置分析在第一图片中波导片80的耦出光栅82的边缘(特征线fl)与基准线rl的夹角,该夹角为0.46度,也即第一旋转角度r1为0.46度。
201.s17、控制装置分析在第一图片中标定用波导片80的特征点的第一像素位置p1,并记录第一像素位置p1的信息。
202.具体地,标定用波导片80的特征点83例如为耦出光栅82的边界角的顶点。第一像素位置p1包括沿y轴方向的第一y轴坐标位置y1和沿x轴方向的第一x轴坐标位置x1。该边界角顶点83(特征点83)在第一图片中的像素位置例如为(780,594),也即边界角顶点83在数字图片中位于第594行、第780列像素的位置,该位置也即第一像素位置p1,其中x1=780,y1=594。可以理解的,边界角顶点83可以选择耦出光栅82的四个边界角中的任一个的顶点。
203.现有技术的视觉引导定位方法通常需要在目标位置放置标识物作为识别目标,标识物可以是临时安放在目标位置的,也可以是永久性加工在目标位置(例如雕刻、印刷),标识物与目标位置之间难免产生误差,并且多一道工序。在本步骤中,本发明直接利用耦出光栅82的边界角作为识别目标,避免了标识物带来的误差,并简化了工艺。
204.至此,标定工序工作完成。用户将标定用波导片80从夹具20中取出,并在夹具20中放入待检测的波导片80(也称检测用波导片80),进入检测工序。在检测工序中,波导片检测系统100逐个检测检测用波导片80的性能。其中,波导片检测系统100需要使检测成像装置91与检测用波导片80的耦入光栅81和耦出光栅82的相对位置与在步骤s11中的检测成像装置91与标定用波导片80的耦入光栅81和耦出光栅82的相对位置相同。在波导片的检测过程的检测工序中,波导片检测系统100配置为完成以下步骤的工作。
205.s21、控制装置控制移动装置40工作,使夹具20相对于成像装置90位于第二位置p2,并使夹具20相对于成像装置90的旋转角度为第一角度r1。
206.具体地,控制装置控制z轴移动装置41、y轴移动装置61和x轴移动装置51工作,以使夹具20相对于成像装置90位于第二位置p2;并且控制装置控制旋转装置71工作,以使夹具20相对于成像装置70的旋转角度为第一角度r1。第二位置p2的信息在步骤s14中予以记录,第一角度r1的信息在步骤s12中予以记录。控制装置根据所记录的信息,自动控制移动装置40将成像装置90(也即检测成像装置91,也即定位成像装置92)移动至x、y、z轴位置为(150.5,15.0,100)的第二位置p2,将夹具20相对于基座10转动至90.5度。在步骤s21中,可以理解的,如图8所示,此时在定位成像装置92的成像视野中可以看到清晰的耦出光栅82。
207.s22、控制装置控制定位成像装置92拍摄待检测波导片80以获得第二图片,控制装置根据第二图片控制旋转装置71工作,使夹具20相对于成像装置90的旋转角度为第二角度r2。
208.在此步骤中,控制装置控制定位成像装置92拍摄的待检测波导片80的第二图片如图8所示。具体地,控制装置分析在第二图片中待检测波导片80相对于基准线rl的第二旋转角度r2,第二角度r2为第一角度r1加上第二旋转角度r2的和再减去第一旋转角度r1的差,也即使波导片80相对于成像装置90转动的角度为第一旋转角度r1减去第二旋转角度r2的
差。其中,第一角度r1的信息在步骤s12中予以记录,第一旋转角度r1的值在步骤s16中予以记录。例如,如图9所示,波导片80的耦出光栅82的边缘(特征线fl)与基准线rl的第二旋转角度r2为12.24度。则此步骤中夹具20的转动角度为r1-r2=0.46-12.24=-11.78度,第二角度r2=r1+r2-r1=90.5+12.24-0.46=102.28度。经过上述计算后,控制装置控制旋转装置71工作,使夹具20相对于成像装置90旋转-11.78度,也即使夹具20相对于基座10旋转-11.78度,使得夹具20相对于成像装置90的旋转角度为102.28度,也即使得夹具20相对于基座10的旋转角度为102.28度。夹具20被旋转后,在定位成像装置92的拍摄视野中看到的检测用波导片80的样子如图9所示。
209.s23、控制装置控制定位成像装置92拍摄待检测波导片以获得第三图片,控制装置根据第三图片控制z轴移动装置41、y轴移动装置61和x轴移动装置51工作,使夹具20相对于成像装置90位于第三位置p3。
210.此步骤中,控制装置控制定位成像装置92拍摄的检测用波导片60的第三图片如图9所示。具体地,控制装置分析在第三图片中检测用波导片80的特征点83的第二像素位置p2,控制装置根据第一像素位置p1和第二像素位置p2确定第三位置p3。在第三图片中,第二像素位置p2包括沿y轴方向dy的第二y轴坐标位置y2和沿x轴方向dx的第二x轴坐标位置x2。第三位置p3为从第一位置p1沿y轴方向dy移动第一移动距离d1并且沿x轴方向dx移动第二移动距离d2的位置,其中,d1=(y2-y1)
×
a,d2=(x2-x1)
×
a,a为一个像素对应的实际物理尺寸。例如a=3.45μm。
211.第一像素位置p1的信息在步骤s17中予以记录。例如,在图7所示的第一图片中,耦出光栅82的边界角的顶点83的第一像素位置p1中,x1=780,y1=594。
212.例如,在图9所示的第三图片中,耦出光栅82左上角顶点83在图像中的坐标为(1278,1291),即x2=1278,y2=1291。则:
213.d1=(y2-y1)
×
a=(1291-594)
×
0.00345=2.40465mm;
214.d2=(x2-x1)
×
a=(1278-780)
×
0.00345=1.7181mm。
215.第三位置p3为从第一位置p1沿y轴方向dy移动第一移动距离d1并且沿x轴方向dx移动第二移动距离d2的位置。也即,第三位置p3与第一位置p1的y轴坐标位置相差d1,第三位置p3与第一位置p1的x轴坐标位置相差d2,第三位置p3与第一位置p1的z轴坐标位置相同。第一位置p1的参数值在步骤s12中予以记录,第一位置p1的x、y、z轴位置为(100.3,20.2,135)。则,第三位置p3的x轴坐标为100.3+1.7181=102.0181mm,第三位置p3的y轴坐标为20.2+2.40465=22.60425mm,第三位置p3的z轴坐标为135mm。
216.计算出第三位置p3的坐标后,控制装置控制z轴移动装置41、x轴移动装置51和y轴移动装置61工作,使成像装置90从第二位置p2移动至第三位置p3。
217.在此步骤中,控制装置根据特征点83在第一图像和第三图像中的像素位置补偿不同波导片80的耦入光栅81和耦出光栅82与波导片80的轮廓的相对位置的差异,从而使得成像装置90与检测用波导片80的耦入光栅81和耦出光栅82的相对位置和成像装置90与标定用波导片80的耦入光栅81和耦出光栅82的相对位置相同。控制装置直接从第三图像中获取顶点特征点83的第二像素位置p2,而并非仅通过计算获得夹具20旋转到第二角度r2后的特征点83的像素位置,使得特征点83的像素位置p2的值更准确,有利于使检测成像装置91在理想位置对准耦入光栅81和耦出光栅82。
218.优选地,定位成像装置92的定位摄像头95包括远心镜头。普通镜头存在透视现象,当成像装置90沿z轴方向dz的位置发生变化时,非图像中心物体在图像中的坐标会发生变化,而z轴电机45本身存在不可避免的误差,因此普通镜头的透视现象带来的误差无法避免。而远心镜头无透视现象,图像中物体坐标不受z轴电机45的误差的影响而发生变化,减少了最终的定位误差。
219.至此,波导片检测系统100完成将检测成像装置91在检测位置对准耦入光栅81和耦出光栅82的工作。
220.s24、控制装置获取检测摄像头93所拍摄的待检测波导片80的耦出光栅82的图像,分析波导片80的质量和性能。
221.可以理解的,在通过步骤s11至s17的标定工序后,凡是与标定用波导片80规格型号相同的待检测波导片80均可以通过步骤s21至s24的检测工序检测其质量,并且每次检测过程中,检测成像装置91均在标定工序中由用户所确定的检测位置对准耦入光栅81和耦出光栅82。也即波导片检测系统100可以实现一次标定、多次检测。
222.当未裁切的波导片80直接放置在第一夹持部26时,未裁切的波导片80与背板22的距离为第一距离d1。当裁切后的波导片80通过第二夹具31连接至第一夹具21时,裁切后的波导片80与背板22的距离为第二距离d2。其中,夹具20构造为,通过设计第二夹具31的尺寸或调整第二夹具31与背板22的距离,使得第一距离d1等于第二距离d2。从而,波导片80安装至夹具20的安装方法不会影响上述检测过程中的位置对准。
223.根据本发明的波导片检测系统,采用夹具夹持波导片,采用成像装置拍摄波导片进而检测波导片的质量。其中,通过设置移动装置使得成像装置相对于波导片可以在三维空间移动和转动,从而可以将成像装置相对于波导片调节到适合检测波导片的位置,有效保证检测质量。上述的所有优选实施方式中所述的流程、步骤仅是示例。除非发生不利的效果,否则可以按与上述流程的顺序不同的顺序进行各种处理操作。上述流程的步骤顺序也可以根据实际需要进行增加、合并或删减。
224.除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
225.本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。此外本领域技术人员可以理解的是,本发明并不局限于上述实施方式,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1