激光探测方法、装置和计算可读存储介质与流程
本申请涉及激光雷达领域,尤其涉及激光探测方法、装置和计算可读存储介质。
背景技术:
1、激光雷达由发射系统、接收系统、扫描控制系统以及数据处理系统等部分组成,其通过测量出射的探测激光和接收的回波激光之间的时间差进行测距,具有分辨率高、灵敏度高、抗干扰能力强以及不受光照条件影响等优点,已经广泛应用于自动驾驶、物流车、机器人、车路协同以及公共智慧交通等领域。
2、单光子接收器(single photon avalanche diode,spad)由于其优异的光电转换能力,经常被应用于激光雷达产品中。然而,单光子接收器其也更容易受到杂散光的影响,尤其是在杂散光较明显的同轴光路系统中。杂散光直接导致单光子接收器提前饱和,无法响应近距离探测的回波激光,进而造成激光雷达的近场盲区。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种激光探测方法、装置和计算可读存储介质,可以消除杂散光的干扰,提升激光雷达的探测能力。
2、本申请第一方面提供一种激光探测方法,包括:
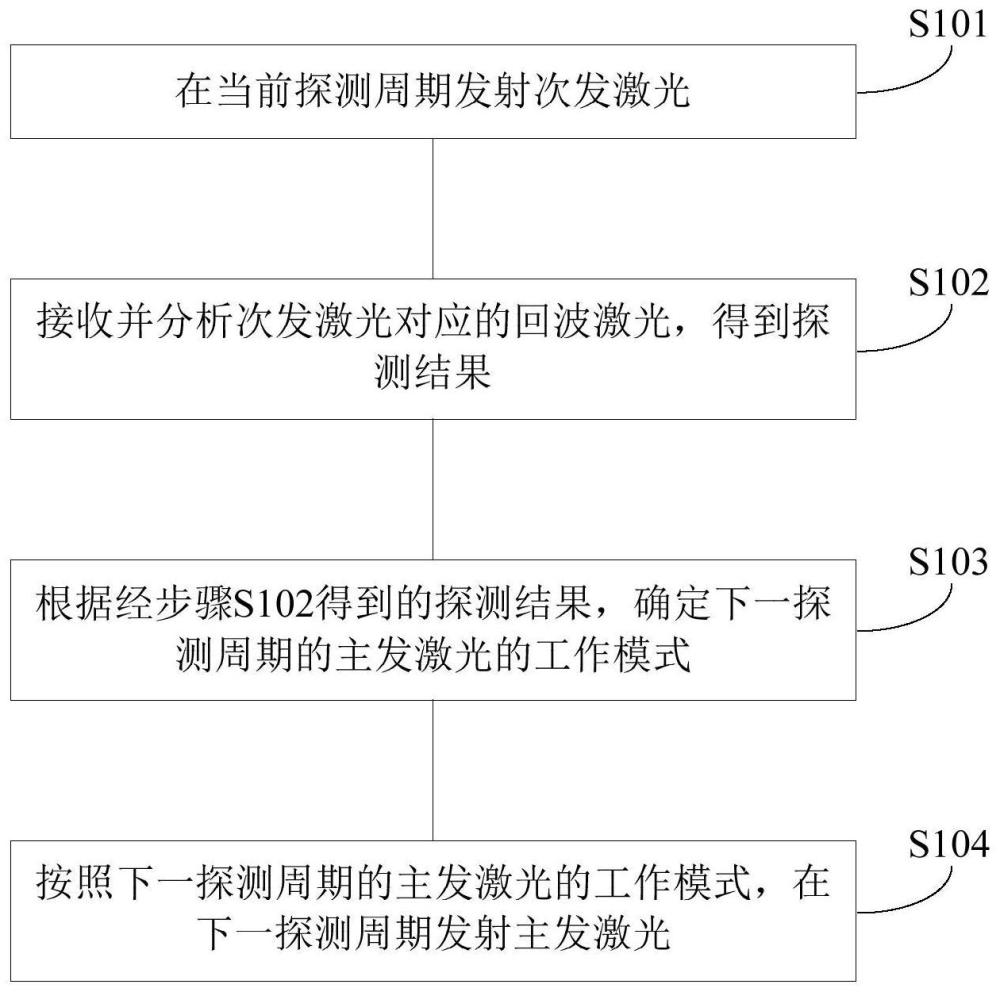
3、在当前探测周期发射次发激光;
4、接收并分析所述次发激光对应的回波激光,得到探测结果;
5、根据所述探测结果,确定下一探测周期的主发激光的工作模式;
6、按照所述工作模式,在所述下一探测周期发射所述主发激光。
7、本申请第二方面提供一种激光探测装置,包括:
8、第一发射模块,用于在当前探测周期发射次发激光;
9、第一发射模块,用于在探测周期的当前时刻发射次发激光;
10、分析模块,用于接收并分析所述次发激光对应的回波激光,得到探测结果;
11、确定模块,用于根据所述探测结果,确定下一探测周期的主发激光的工作模式;
12、第二发射模块,用于按照所述工作模式,在所述下一探测周期发射所述主发激光。
13、本申请第三方面提供一种电子设备,包括:
14、处理器;以及
15、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
16、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
17、本申请提供的技术方案,在探测周期内先发射次发激光进行探测,根据次发激光的探测结果,确定下一探测周期的主发激光的工作模式。次发激光的发射功率较小,能够先对近场区域进行探测。根据近场区域的探测结果,能够初步获知近场区域内的目标物体的分布情况,进而确定主发激光的工作模式。若目标物体分布在距离较远的区域,则增大主发激光的发射功率,保证激光雷达的探测能力;若目标物体分布在距离较近的区域,则减小主发激光的发射功率,减少杂散光产生的近场盲区,避免不必要的高功率发射档位,进而减小激光雷达产品的功耗、提升人眼安全。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种激光探测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的激光探测方法,其特征在于,所述接收并分析所述次发激光对应的回波激光,得到探测结果,包括:
3.根据权利要求2所述的激光探测方法,其特征在于,所述根据所述次发激光的前导信号的波形特征,确定所述探测结果,包括:
4.根据权利要求3所述的激光探测方法,其特征在于,所述根据所述探测结果,确定下一探测周期的主发激光的工作模式,包括:
5.根据权利要求3所述的激光探测方法,其特征在于,所述根据所述探测结果,确定下一探测周期的主发激光的工作模式,包括:
6.根据权利要求2所述的激光探测方法,其特征在于,所述根据所述反射激光的接收时刻,确定所述探测结果,包括:
7.根据权利要求6所述的激光探测方法,其特征在于,所述根据所述探测结果,确定下一探测周期的主发激光的工作模式,包括:
8.根据权利要求6所述的激光探测方法,其特征在于,所述根据所述探测结果,确定下一探测周期的主发激光的工作模式,包括:
9.根据权利要求1至8任意一项所述的激光探测方法,其特征在于,所述激光的帧周期包括至少两个所述探测周期,所述帧周期的初始所述探测周期的主发激光的工作模式为近距离模式。
10.一种激光探测装置,其特征在于,所述装置包括:
11.一种电子设备,其特征在于,包括:
12.一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1至9中任意一项所述的方法。
技术总结
本申请涉及一种激光探测方法、装置和计算可读存储介质。该方法包括:在当前探测周期发射次发激光;接收并分析次发激光对应的回波激光,得到探测结果;根据探测结果,确定下一探测周期的主发激光的工作模式;按照主发激光的工作模式,在下一探测周期发射主发激光。本申请提供的方案可以消除杂散光的干扰,提升激光雷达的探测能力。
技术研发人员:江申
受保护的技术使用者:深圳市速腾聚创科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!