基于原型和双重域对抗的旋转机械跨工况故障诊断方法
1.本发明属于机械设备智能诊断技术领域,具体涉及基于原型和双重域对抗的旋转机械跨工况故障诊断方法。
背景技术:
2.旋转机械作为现代制造系统中的主要机械设备,为实现现代制造智能化、快速化、高效化的重要保障。当前,旋转机械正朝着高度复杂化和集成化的方向快速发展,一旦其中的关键部件发生故障,将可能造成巨大的经济损失和人员伤亡。因此,面向旋转机械的智能诊断方法具有重大的意义。
3.近年来,基于深度学习的智能故障诊断方法逐渐受到学术界和工业界的关注。然而,应用传统的监督式的深度学习方法(申请号cn201910991173.7、名称为:基于深度卷积域对抗迁移学习的故障诊断方法),对旋转机械进行故障诊断时,存在以下两个缺点:1,旋转机械的工况变化会导致设备在某一工况的运行中采集的样本和另一工况下采集的样本存在明显的分布差异,造成某一工况下训练的深度学习模型在另一工况的应用效果不佳;2,单一工况下的样本下缺少足够的标签,造成实际应用中不可能对每一工况进行建模。因此,域适应方法(申请号cn201910463197.5、名称为:一种对抗判别域适应一维卷积神经网络智能故障诊断方法)受到研究人员的关注,在机械设备诊断领域中,域适应方法能够利用源域(带标签信息的某一工况)中的诊断知识,解决目标域(无标签信息的另一工况)中的诊断任务;但是,单一的域适应方法的故障诊断精度不高,无法有效地对旋转机械的状态进行辨识。
技术实现要素:
4.为了克服现有技术的缺点,本发明的目的是提供一种基于原型和双重域对抗的旋转机械跨工况故障诊断方法,采用的域适应网络结构简单,能够同时适应不同工况下的边缘分布和条件分布,在不同类型的旋转机械下准确地进行故障辨识,实现对旋转机械的智能故障诊断。
5.为了达到上述目的,本发明采用的技术方案为:
6.一种基于原型和双重域对抗的旋转机械跨工况故障诊断方法,包括以下步骤:
7.步骤一:通过信号采集设备采集旋转机械在不同工况下的振动数据,每个工况下对应不同的域;
8.步骤二:搭建基于原型和双重域对抗的域适应网络,该域适应网络包括一个特征学习器f及可训练参数θf、一个状态分类器c及可训练参数θc、一个原型学习器p、一个边缘域对抗器dm及可训练参数θ
dm
,和多个条件域对抗器dc及对应的可训练参数;其中,特征学习器提取源域和目标域的高层次隐含特征,状态分类器学习一个类分离的特征空间,原型学习器用于学习表征源域中每一类样本的原型,边缘域对抗器从整体上对齐源域分布和目标域分布,多个条件域对抗器对齐特征空间中的源域和目标域每一个类的结构;边缘域对抗器
与条件域对抗器和特征学习器通过梯度反转层(gradient reversal layer,grl)连接,且条件域对抗器的个数和旋转机械的状态类别数一致;
9.对于一个旋转机械的跨工况诊断任务,源域数据集为其中ns分别表示源域样本、源域样本标签、源域样本数量,目标域数据集为其中n
t
分别表示目标域样本、目标域样本数量;利用交叉熵损失函数l
cel
,状态分类器c的分类损失l
cls
表述为:
[0010][0011]
其中f(xi)为特征学习器提取样本xi的特征,c(f(xi))为分类器的softmax输出;
[0012]
原型学习器被用于学习源域每一类样本的原型特征,第k类样本的原型pk的学习过程如下所示:
[0013][0014]
其中n
sk
表示源域数据集中k类样本的数量,k为诊断任务的总类别数;
[0015]
利用边缘域对抗器对齐源域和目标域的边缘分布,且利用源域的原型来代表源域的所有样本,并且对源域和目标域的样本打上域标签,源域di(i=1,2,
…
,k)和目标域di(i=1,2,
…
,n
t
)的域标签分别是1和0,边缘域对抗器dm的对抗损失lm如下所示:
[0016][0017]
其中fi为源域原型特征和目标域特征的集合,l
bcel
为二元交叉熵损失函数;
[0018]
同理,利用条件域对抗器对齐源域和目标域的子类结构,条件域对抗器dc的对抗损失lc如下所示:
[0019][0020]
其中vi为源域原型特征和目标域特征与状态分类器softmax乘积的集合;
[0021]
随着损失l
cls
的减小,域适应网络能够习得一个类分离的特征空间;随着双重域对抗损失lm和lc的增大,域适应网络不能够区分特征是来自源域或目标域,即习得域不变的特征空间,因此,域适应网络的总优化目标函数l如下所示:
[0022]
l=l
cls-αl
m-βlc[0023]
其中,α和β分别是边缘分布对齐和条件分布对齐的权衡参数;
[0024]
该目标函数通过随机梯度下降adam算法优化,具体的参数更新规则如下:
[0025]
[0026][0027][0028][0029]
其中,γ和分别为学习率和偏导;
[0030]
步骤三:将目标域的样本输入到训练好的特征学习器和状态分类器中;
[0031]
步骤四:获取旋转机械的跨工况故障诊断结果。
[0032]
本发明的优点为:
[0033]
(1)本发明同时采取边缘域对抗器和条件域对抗器,结合双重域对抗学习,实现了源域和目标域特征空间的边缘分布对齐和条件分布对齐,促进域适应网络学习类别分离和域不变的特征空间;
[0034]
(2)本发明将原型学习和域对抗结合在一起,实现了源域特征空间和目标域特征空间的细粒度匹配,构造了一个能在不同工况中实现知识迁移的故障诊断模型;
[0035]
(3)本发明采用深度卷积神经网络为骨干结构,实现了端到端的特征提取和故障诊断,解决了目标域无标签预测的问题,提高了旋转机械跨工况诊断的精度。
附图说明
[0036]
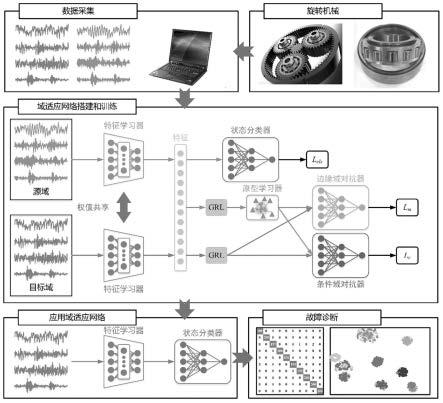
图1为本发明方法的流程图。
[0037]
图2为实施例滚动轴承的实验平台。
[0038]
图3为实施例滚动轴承(源域为1hp,目标域为2hp)故障诊断结果的评价指标示意图。
具体实施方式
[0039]
下面结合附图和实施例对本发明进行详细说明。
[0040]
参照图1,一种基于原型和双重域对抗的旋转机械跨工况故障诊断方法,包括以下步骤:
[0041]
步骤一:通过信号采集设备采集旋转机械在不同工况下的振动数据,每个工况下对应不同的域,本实施例滚动轴承实验平台如图2所示,扭转传感器的两端和测试电机、负载电机连接,该实验平台共有四种运行工况,即负载0hp、负载1hp、负载2hp和负载3hp;测试电机的滚动轴承一共有四种健康状态,包括正常、内圈故障、滚动体故障和外圈故障,上述三种典型故障分别有三种不同的程度,故每个工况下共计十种滚动轴承健康状态,每种健康状态下包含200个样本,每个样本包括1024个数据点;
[0042]
步骤二:搭建基于原型和双重域对抗的域适应网络,该域适应网络包括一个特征学习器f及可训练参数θf、一个状态分类器c及可训练参数θc、一个原型学习器p、一个边缘域对抗器dm及可训练参数θ
dm
、和k个条件域对抗器dc及对应的可训练参数,k=10;其中,特征学习器提取源域和目标域的高层次隐含特征,状态分类器学习一个类分离的特征空间,原
型学习器用于学习表征源域中每一类样本的原型,边缘域对抗器从整体上对齐源域分布和目标域分布,多个条件域对抗器对齐特征空间中的源域和目标域每一个类的结构;需要指出的是,边缘域对抗器与条件域对抗器和特征学习器通过梯度反转层(gradient reversal layer,grl)连接,且条件域对抗器的个数和旋转机械的状态类别数一致;
[0043]
对于滚动轴承的跨工况诊断任务,源域数据集为其中ns分别表示源域样本、源域样本标签、源域样本数量;目标域数据集为其中n
t
分别表示目标域样本、目标域样本数量,利用交叉熵损失函数l
cel
,状态分类器c的分类损失l
cls
可表述为:
[0044][0045]
其中f(xi)为特征学习器提取样本xi的特征,c(f(xi))为分类器的softmax输出;
[0046]
原型学习器被用于学习源域每一类样本的原型特征,第k类样本的原型pk的学习过程如下所示:
[0047][0048]
其中n
sk
表示源域数据集中k类样本的数量;k为诊断任务的总类别数;
[0049]
利用边缘域对抗器对齐源域和目标域的边缘分布,且利用源域的原型来代表源域的所有样本,并且对源域和目标域的样本打上域标签,源域di(i=1,2,
…
,k)和目标域di(i=1,2,
…
,n
t
)的域标签分别是1和0;边缘域对抗器dm的对抗损失lm如下所示:
[0050][0051]
其中fi为源域原型特征和目标域特征的集合,l
bcel
为二元交叉熵损失函数;
[0052]
同理,利用条件域对抗器对齐源域和目标域的子类结构,条件域对抗器dc的对抗损失lc如下所示:
[0053][0054]
其中vi为源域原型特征和目标域特征与状态分类器softmax乘积的集合;
[0055]
随着损失l
cls
的减小,域适应网络能够习得一个类分离的特征空间;随着双重域对抗损失lm和lc的增大,域适应网络不能够区分特征是来自源域或目标域,即习得域不变的特征空间,因此,域适应网络的总优化目标函数l如下所示:
[0056]
l=l
cls-αl
m-βlc[0057]
其中,α和β分别是边缘分布对齐和条件分布对齐的权衡参数,该任务中分别设置为0.5和0.05;
[0058]
该目标函数通过随机梯度下降adam算法优化,具体的参数更新规则如下:
[0059][0060][0061][0062][0063]
其中,γ和分别为学习率和偏导;
[0064]
步骤三:将目标域的样本输入到训练好的特征学习器和状态分类器中;
[0065]
步骤四:获取滚动轴承迁移学习任务的故障诊断结果;为了验证本发明的有效性,和其他方法相比,其他方法选择最大均值差异(maximum mean discrepancy,mmd)、域对抗神经网络(domain adversarial neural network,dann)、深度卷积迁移学习网络(deep convolutional transfer learning network,dctln)、域对抗迁移网络(domain adversarial transfer network,datn)、联合分布对齐(joint distribution adaptation,jda)、不使用原型学习器(nop)、不使用边缘域对抗器(nom)、不使用条件域对抗器(noc);该滚动轴承的所有跨工况故障诊断结果如表1所示;
[0066]
表1
[0067]
任务mmddanndctlndatnjdanopnocnom本发明hp0-hp174.7080.0582.1582.0085.6594.2595.6594.8597.15hp0-hp279.9077.3577.1083.0081.6097.5592.3597.5099.25hp0-hp384.9578.3575.7573.9579.4092.3095.6597.1598.55hp1-hp081.7586.1576.6575.0080.4091.9093.2093.5595.75hp1-hp286.5887.1089.2090.0095.7592.4595.7097.0599.35hp1-hp379.2585.7085.9590.4088.1590.2594.1093.7596.85hp2-hp085.5584.7582.2089.4585.6594.3596.1597.7599.75hp2-hp191.4087.4583.3088.1591.0091.2093.4096.5598.95hp2-hp389.8079.3076.5086.9584.2593.1598.6591.3599.50hp3-hp087.7565.5085.5582.7083.1594.6595.5597.2599.45hp3-hp183.9086.0574.5077.5591.7593.0595.3594.5097.85hp3-hp293.3081.8575.1086.0092.5094.7597.3093.0099.20平均值84.9081.6380.3383.7686.6093.3295.2595.3598.47
[0068]
本发明方法对各种工况下的滚动轴承故障诊断精度都有明显提高,这进一步说明本发明方法的有效性。在源域为1hp,目标域为2hp上的跨工况诊断任务的各项指标(包括准确率,f1分数,召回率,精确率)对比图3所示,该结果进一步从各个方面验证了本发明方法的优越性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1