一种集成式六自由度微机械量子陀螺仪的制作方法
1.本发明属于惯性技术领域,涉及一种微机械陀螺仪,具体涉及一种具有六自由度的微机械量子陀螺仪,可用于能源、惯性导航、无人驾驶、雷达侦测、地质勘探、水下探测、精密仪器仪表、3d数据传输等领域。
背景技术:
2.陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或两个轴的角运动检测装置。
3.机械陀螺仪是指采用自转转子转动或载体的振动产生陀螺力矩来测量角运动的陀螺仪,包括刚体转动陀螺仪、振动陀螺仪和半球谐振陀螺仪。微机械陀螺仪是利用科里奥利力的变化产生的微小振动位移来检测角运动变化的检测装置。它不需要机械转子,属于微电子机械系统,可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。微机械陀螺仪按照驱动轴数分类,可分为单轴微机械陀螺仪和双轴微机械陀螺仪,按照驱动方式分类,可分为静电式微机械陀螺仪、电磁式微机械陀螺仪和压电式微机械陀螺仪,按照敏感结构的自由度数分类,可分为四自由度微机械陀螺仪和六自由度微机械陀螺仪。
4.现有的六自由度微机械陀螺仪采用组合方式,一种是由gps信号单元和imu惯性测量单元组成系统,其中imu惯性测量单元包括三个微机械陀螺、三个加速度计和三个磁力计;一种是采用分立式双自由度驱动的微机械陀螺仪,再配合磁芯结构组成系统,该系统属于自主式惯性系统,无需依赖gps。
5.微机械量子陀螺仪是指利用约瑟夫森效应制造的一种微机械陀螺仪。约瑟夫森效应从广义上讲,是指具有相同性质的超流体分子(不同的行为通常在耦合弱力量子系统之间发生)在两个由薄绝缘层隔开的超导体之间流动,当两个超流体(无摩擦流体)通过耦合弱力键链接并且仅在一侧施加压力时,流体会从一侧振动到另一侧。
6.例如,申请公布号为cn114383591a,名称为“一种双轴石英微机械陀螺仪”的专利申请,公开了一种由两个单轴驱动模块正交垂直同轴装配组合成的音叉式四自由度微机械陀螺仪,该发明包括第一陀螺法兰、第一减振体、第一石英微机械表芯、第二陀螺法兰、第二减振体和第二石英微机械表芯,实现分别对第一石英微机表芯和第二石英微机表芯的轴向减振效果,提高减振性能,与磁芯结构组合,可以实现六自由度测量,能够解决有限动态跟踪技术问题。由于音叉式微机械陀螺仪原理上不能测量章动角,所以必须与磁芯结构组合,又由于其分立式的安装结构存在装配同轴误差,陀螺仪稳定性不足。
技术实现要素:
7.本发明的目的在于克服上述现有技术存在的缺陷,提出了一种集成式六自由度微机械量子陀螺仪,用于提高陀螺仪稳定性。
8.为了实现上述目的,本发明采取的技术方案包括机械单元和电路控制单元,其特
征在于:
9.所述机械单元,包括导向支撑、质量块和两个电极端盖;所述导向支撑,采用内壁设置有径向凸起的空心圆柱形结构;所述质量块,采用中心设有通孔的圆饼状介质材料结构,其两个端面上分别设置有六个栅极式矩形力敏电容;所述电极端盖,采用一个端面设置有柱状凸起,另一个端面设置有六个电极端子的圆柱状结构;所述质量块嵌套在导向支撑径向凸起形成的空间位置,所述两个电极端盖,其设置有柱状凸起的端面相对,嵌套在导向支撑两个端面位置的内腔中;
10.所述电路控制单元,包括数字驱动模块、正弦波发生器、电路解析模块、测量模块和计算机模块,该电路控制单元设置在质量块的一个端面上,其中:
11.所述数字驱动模块,包括并行排布的锯齿波发生器和方波发生器,用于对电路解析模块、测量模块、计算机模块和质量块两个端面上分别设置的六个栅极式矩形力敏电容提供时基扫描激励、电平触发振荡激励;
12.所述正弦波发生器,用于对电路解析模块、测量模块、计算机模块和质量块两个端面上分别设置的六个栅极式矩形力敏电容提供谐波触发振荡激励;
13.所述电路解析模块,包括镜像同步控制回路1、阻尼控制回路2、谐频控制回路3、宂余控制回路4和电源分配控制开关5;镜像同步控制回路1用于对数字驱动模块的输出施加镜像驱动偏执电压后提供给六个栅极式矩形力敏电容;阻尼控制回路2用于对六个栅极式矩形力敏电容的输出分离后进行量化处理;谐频控制回路3用于对阻尼控制回路2的输出引入解析偏置进行调谐;宂余控制回路4用于对六个栅极式矩形力敏电容进行主动式功率补偿;电源分配控制开关5用于将数字驱动模块的输出提供给六个栅极式矩形力敏电容;
14.所述测量模块,包括检流控制输出回路6和进动角与章动角分离输出回路7;检流控制输出6用于对阻尼控制回路2分离后量化处理的x向电压进行积分,以输出定向角电压;进动角与章动角分离输出回路7用于对阻尼控制回路2分离后量化处理的y向电压和z向电压分别进行积分,以输出进动角电压和章动角电压;
15.所述计算机模块,用于根据检流控制输出回路6输出的定向角电压和进动角与章动角分离输出回路7输出的进动角电压和章动角电压,建立地理坐标系和计算沿z向的外界角速度输入后,测量模块输出的定向角电压、进动角电压和章动角电压相对于地理坐标系在x、y、z方向上的角度变化值;
16.所述电极端盖端面设置的六个电极端子,分别与外设数字电源、外设模拟电源和其它外设连接;
17.所述质量块两个端面上设置的六个栅极式矩形力敏电容,分别与正弦波发生器、电路解析模块和测量模块连接;
18.本发明的工作原理是:数字驱动模块、正弦波发生器分别通过向质量块两个端面上的六个栅极式矩形力敏电容的动栅依次施加一个x向数字驱动力、一个y向正弦驱动力,驱动电容的动栅绕x、y轴旋转同时沿该两个轴的方向振动,实现双轴四自由度谐振振动,当有沿z向的外界角速度输入时,质量块上的六个栅极式矩形力敏电容的动栅将在敏感平面内做沿径向和旋转向的两自由度谐振振动;电路解析模块对两自由度谐振振动与双轴四自由度谐振振动所合成的双轴六自由度谐振振动引起的六个栅极式矩形力敏电容动栅间的电压变化进行分离后量化处理;测量模块对分离后量化处理的x、y和z向电压分别进行积
分,以输出定向角电压、进动角电压和章动角电压;计算机模块计算沿z向的角速度输入后,测量模块输出的定向角电压、进动角电压和章动角电压相对于地理坐标系在x、y、z方向上的角度变化值。
19.上述一种集成式六自由度微机械量子陀螺仪,所述导向支撑,其内壁设置的径向凸起位于该导向支撑轴向的中分线上。
20.上述一种集成式六自由度微机械量子陀螺仪,所述质量块,其端面上设置的六个栅极式矩形力敏电容,包括位于端面中心位置的两个第一力敏电容、关于端面一条直径对称的两个第二力敏电容和关于端面另一条直径对称的两个第三力敏电容;所述第一力敏电容与第二力敏电容平行,第三力敏电容与第一力敏电容和第二力敏电容垂直;该质量块两个端面上设置的六个栅极式矩形力敏电容在空间上相差90
°
。
21.上述一种集成式六自由度微机械量子陀螺仪,所述质量块,其厚度小于导向支撑内壁上径向凸起的的厚度。
22.上述一种集成式六自由度微机械量子陀螺仪,所述电极端盖,在其电极端子的端面上设置有用于减轻质量的沟槽。
23.本发明与现有技术相比,具有如下优点:
24.1、本发明通过设置在质量块上电路控制单元中的测量模块对分离后量化处理的三个方向电压进行积分,能够输出定向角电压、进动角电压和章动角电压,不需要磁芯结构参与测量章动角,简化了结构,进而提高了陀螺仪的稳定性。
25.2、本发明机械单元中的导向支撑、质量块和两个电极端盖组成一体式结构,六个栅极式矩形力敏电容设置在质量块圆饼状结构的两个端面上,避免了现有技术采用的两个微机械表芯分立式结构在装配过程中容易产生误差的缺陷,进一步提高了陀螺仪的稳定性。
附图说明
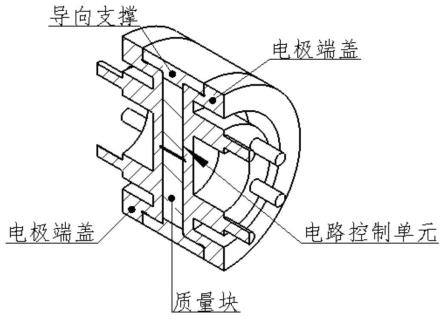
26.图1是本发明的整体结构示意图;
27.图2是本发明中导向支撑的结构示意图;
28.图3是本发明中电极端盖的结构示意图;
29.图4是本发明电路控制单元的结构示意图;
30.图5是本发明0
°
正弦波驱动时定向角、进动角、章动角的结果图;
31.图6是本发明1.005
°
正弦波驱动时定向角、进动角、章动角的结果图;
32.图7是本发明1.113
°
正弦波驱动时定向角、进动角、章动角的结果图。
具体实施方式
33.下面结合附图和具体实施例,对本发明作进一步详细说明。
34.参照图1,本发明包括机械单元和电路控制单元,其中:
35.所述机械单元,包括导向支撑、质量块和两个电极端盖;所述导向支撑,其结构如图2所示,采用内壁设置有径向凸起的空心圆柱形结构,其内壁设置的径向凸起位于该导向支撑轴向的中分线上。
36.所述质量块,采用中心设有圆柱形通孔的圆饼状介质材料结构,其两个端面上分
别设置有六个栅极式矩形力敏电容,其端面上设置的六个栅极式矩形力敏电容,包括位于端面中心位置的两个第一力敏电容、关于端面一条直径对称的两个第二力敏电容和关于端面另一条直径对称的两个第三力敏电容;所述第一力敏电容与第二力敏电容平行,第三力敏电容与第一力敏电容和第二力敏电容垂直;该质量块两个端面上设置的六个栅极式矩形力敏电容在空间上相差90
°
,六个栅极式矩形力敏电容的动栅和定栅表面镀有光学金属半导体膜;所述质量块厚度小于导向支撑内壁上径向凸起的的厚度。
37.所述电极端盖,其结构如图3所示,采用一个端面设置有柱状凸起,另一个端面设置有六个电极端子的圆柱状结构,在其电极端子的端面上设置有用于减轻质量的矩形环槽。
38.所述质量块嵌套在导向支撑径向凸起形成的空间位置,所述两个电极端盖,其设置有柱状凸起的端面相对,嵌套在导向支撑两个端面位置的内腔中。
39.所述电路控制单元,其结构如图4所示,包括数字驱动模块、正弦波发生器、电路解析模块、测量模块和计算机模块,该电路控制单元设置在质量块的一个端面上,其中:
40.所述数字驱动模块,包括并行排布的锯齿波发生器和方波发生器,用于对电路解析模块、测量模块、计算机模块和质量块两个端面上分别设置的六个栅极式矩形力敏电容提供时基扫描激励、电平触发振荡激励;
41.所述正弦波发生器,用于对电路解析模块、测量模块、计算机模块和质量块两个端面上分别设置的六个栅极式矩形力敏电容提供谐波触发振荡激励;
42.所述电路解析模块,包括镜像同步控制回路1、阻尼控制回路2、谐频控制回路3、宂余控制回路4和电源分配控制开关5;镜像同步控制回路1用于对数字驱动模块的输出施加镜像驱动偏执电压后提供给六个栅极式矩形力敏电容;阻尼控制回路2用于对六个栅极式矩形力敏电容的输出分离后进行量化处理;谐频控制回路3用于对阻尼控制回路2的输出引入解析偏置进行调谐;宂余控制回路4用于对六个栅极式矩形力敏电容进行主动式功率补偿;电源分配控制开关5用于将数字驱动模块的输出提供给六个栅极式矩形力敏电容;所述电路解析模块中封闭式栅型电容的平行平板表面镀有光学金属半导体膜;
43.所述测量模块,包括检流控制输出回路6和进动角与章动角分离输出回路7;检流控制输出6用于对阻尼控制回路2分离后量化处理的x向电压进行积分,以输出定向角电压;进动角与章动角分离输出回路7用于对阻尼控制回路2分离后量化处理的y向电压和z向电压分别进行积分,以输出进动角电压和章动角电压;所述测量模块中封闭式栅型电容的平行平板表面镀有光学金属半导体膜;
44.所述计算机模块,用于根据检流控制输出回路6输出的定向角电压和进动角与章动角分离输出回路7输出的进动角电压和章动角电压,建立地理坐标系和计算沿z向的外界角速度输入后,测量模块输出的定向角电压、进动角电压和章动角电压相对于地理坐标系在x、y、z方向上的角度变化值;
45.所述电极端盖端面设置的六个电极端子,分别与外设数字电源、外设模拟电源和其它外设连接;
46.所述质量块两个端面上设置的六个栅极式矩形力敏电容,分别与正弦波发生器、电路解析模块和测量模块连接;
47.本发明的工作原理是:数字驱动模块、正弦波发生器分别通过向质量块两个端面
上的六个栅极式矩形力敏电容的动栅依次施加一个x向数字驱动力、一个y向正弦驱动力,驱动电容的动栅绕x、y轴旋转同时沿该两个轴的方向振动,实现双轴四自由度谐振振动,当有沿z向的外界角速度输入时,质量块上的六个栅极式矩形力敏电容的动栅将在敏感平面内做沿径向和旋转向的两自由度谐振振动;电路解析模块对两自由度谐振振动与双轴四自由度谐振振动所合成的双轴六自由度谐振振动引起的六个栅极式矩形力敏电容动栅间的电压变化进行分离后量化处理;测量模块对分离后量化处理的x、y和z向电压分别进行积分,以输出定向角电压、进动角电压和章动角电压;计算机模块计算沿z向的角速度输入后,测量模块输出的定向角电压、进动角电压和章动角电压相对于地理坐标系在x、y、z方向上的角度变化值。
48.为了提高测量精度,结构设计应符合阿贝原则,阿贝原则是指在几何量测量当中,把标准几何量(基准轴线)安放在被测几何量(测量轴线)的延长线上,其误差表达式为:s是指基准轴线与测量轴线之间的距离,可用设计装配同轴度表示,α是指基准轴线与测量轴线之间的夹角,α2可用单位章动角表示。
49.实际使用情况下,阿贝误差会直接体现在陀螺仪的相对零偏稳定性当中,根据现有技术的分立式装配结构和已知的工艺制造能力,本发明的设计装配同轴度是现有技术设计装配同轴度的即本发明的s值是现有技术s值的又由于本发明不需要磁芯结构参与测量章动角,简化了结构,减小了器件敏感结构章动角的变化对测量结果的影响。
50.以下结合仿真实验,对本发明的技术效果进行说明:
51.1、仿真条件和内容:
52.仿真软件采用matlab simulink,温度条件为20℃
±
1℃,平滑时间为5s,正弦波频率为30-50khz,数字驱动模块输出电压为
±
5v,数字驱动模块输出频率为4mhz;
53.仿真1,对本发明0
°
正弦波驱动时定向角、进动角、章动角分别进行仿真,其结果如图5(a)、图5(b)、图5(c)所示;
54.仿真2,对本发明1.005
°
正弦波驱动时定向角、进动角、章动角分别进行仿真,其结果如图6(a)、图6(b)、图6(c)所示;
55.仿真3,对本发明1.113
°
正弦波驱动时定向角、进动角、章动角分别进行仿真,其结果如图7(a)、图7(b)、图7(c)所示。
56.2、仿真结果分析:
57.图5-图7中的横轴表示时间,单位为秒,纵轴表示绝对零偏稳定性,单位为
°
/h。
58.参照图5,当0
°
正弦波驱动时,图5(a)中定向角绝对零偏稳定性为-1.028
°
/h;图5(b)中进动角绝对零偏稳定性为-0.971
°
/h;图5(c)章动角绝对零偏稳定性为0.1942
°
/h,总绝对零偏稳定性为2.1932
°
/h《2.21
°
/h;
59.参照图6,当1.005
°
正弦波驱动时,图6(a)中定向角绝对零偏稳定性为-1.519
°
/h;图6(b)中进动角绝对零偏稳定性为-1.435
°
/h;图6(c)中章动角绝对零偏稳定性为0.2869
°
/h;总绝对零偏稳定性为3.2409
°
/h,相对于0
°
正弦波驱动时总绝对零偏稳定性的相对零偏稳定性为1.0477
°
/h《1.05
°
/h,偏差0.05
°
/h;
60.参照图7,当1.113
°
正弦波驱动时,图7(a)中定向角绝对零偏稳定性为-1.572
°
/h;图7(b)中进动角绝对零偏稳定性为-1.485
°
/h;图7(c)中章动角绝对零偏稳定性0.297
°
/h;
总绝对零偏稳定性为3.354
°
/h,相对于0
°
正弦波驱动时总绝对零偏稳定性的相对零偏稳定性为1.1608
°
/h《1.17
°
/h,偏差0.02
°
/h。
61.根据仿真数据分析可得:角度标度刻度0.4
°
/h,陀螺仪灵敏度6
×
10-7
°
/h,陀螺仪总不确定度u
max
=0.6
°
/h,陀螺仪z向定位精度为
±
0.1
°
/h,pos姿态参数为:横滚精度
±
0.1
°
/h;俯仰精度
±
0.05
°
/h;航向精度
±
0.15
°
/h;阿贝误差影响量可小至0.02
°
/h,角分辨率
±
0.005
°
/h,过载能力50000g,承载能力
±
15000g,说明本发明相对于现有技术陀螺仪的稳定性显著提升。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1