一种模拟真实降雨环境的车载相机在环测试平台及方法与流程
1.本发明属于智能网联汽车测试验证技术领域,具体的说是一种模拟真实降雨环境的车载相机在环测试平台及方法。
背景技术:
2.智能网联汽车是汽车产业的未来发展方向,当前我国智能网联汽车技术正得到迅速发展,多个车企均提出了其智能网联汽车的车型方案,测试验证已成为制约智能网联汽车进一步发展的重要阻碍。硬件在环测试在智能网联汽车的测试体系中兼具仿真环境运行速度快的优势及物理硬件在环的真实性,在测试验证体系中应用范围最广。然而,在针对复杂天气建模方面,尤其是雨天这一最常见的复杂气象条件,硬件在环中仿真环境建模精度仍然存在一定问题,无法完美复现真实雨滴在相机传感器中的感应情况,数字-物理融合降雨环境已成为智能网联汽车硬件在环测试的发展方向。针对这一趋势,现有方法使用简单的喷头方式进行雨滴模拟,这既无法保证落下时的雨滴形状,也无法真实模拟不同风速、车速情况对雨滴的影响。
技术实现要素:
3.本发明提供了一种模拟真实降雨环境的车载相机在环测试平台及方法,使用数字rgb图像表现雨天环境下道路交通环境、道路、车辆等要素,使用真实水滴模拟雨天环境,解决现有方法使用简单的喷头方式进行雨滴模拟,这既无法保证落下时的雨滴形状,也无法真实模拟不同风速、车速情况对雨滴的影响的问题。
4.本发明技术方案结合附图说明如下:
5.第一方面,本发明实施例提供了一种模拟真实降雨环境的车载相机在环测试平台,包括:
6.基础框架,用于硬件在环测试平台的框架,能够放置车窗雨刷模拟系统、雨水模拟系统、风向车速模拟系统;
7.车窗雨刷模拟系统,用于模拟雨水降落在前挡风玻璃;
8.雨水模拟系统,用于模拟雨水;
9.风向车速模拟系统,用于模拟不同风向、风速、车速条件下的雨滴状态。
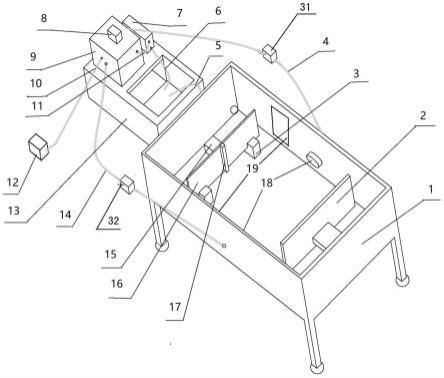
10.所述车窗雨刷模拟系统设置在基础框架内;所述雨水模拟系统中的自适应水头30设置在基础框架的上方;所述雨水模拟系统中的喷水头18设置在基础框架的内壁上;所述自适应水头30和喷水头18模拟雨水;所述雨水模拟系统中的蓄水箱13设置在基础框架外,为自适应水头30和喷水头18供水;所述风向车速模拟系统设置在基础框架上。
11.所述基础框架包括整体外框1和设置在整体外框1内部的屏显系统2;所述屏显系统2包括第一屏幕可运动支架27、第一屏幕可运动支架28和屏幕显示20;所述第一屏幕可运动支架27和第二屏幕可运动支架28均采用电子导轨;所述第一屏幕可运动支架27可以相对第二屏幕可运动支架28前后运动;所述第二屏幕可运动支架28和整体外框1后面的底座连
接,并可进行上下运动。
12.所述车窗雨刷模拟系统包括被测相机15、前挡风玻璃16、雨刮系统17和前挡风玻璃夹具3;所述前挡风玻璃夹具3固定在整体外框1内部底座上;所述前挡风玻璃夹具3夹持前挡风玻璃16;所述被测相机15固定在前挡风玻璃16的一端;所述雨刮系统17设置在前挡风玻璃16的另一端。
13.所述雨水模拟系统包括蓄水箱13、第一导水管4、第二导水管5、第三导水管6、第四导水管10、第五导水管11、第六导水管14、可控水泵7、压力传感器8、压力水室9、电磁开关阀12、自适应水头30、喷水头18、上框22和入水头23;
14.所述可控水泵7与电源连接;所述蓄水箱13中的水通过可控水泵7、第三导水管6和第五导水管11导入压力水室9中,保持压力水室9内的压力;所述压力水室9上安装有压力传感器8,压力传感器8时刻检测压力水室9中的压力,当压力水室9内的水压到达设定值时关闭可控水泵7的电流;所述压力水室9流出的水分为三部分;第一部分流出的水通过第四导水管10及第一电磁开关阀12流入自适应水头30中;所述第一电磁开关阀12通过入水头23为自适应水头30供水;第二部分流出的水通过第一导水管4及第二电磁开关阀31流入喷水头18中;第三部分流出的水通过第六导水管14及第三电磁开关阀32流入喷水头18;所述喷水头18固定在整体外框1的内壁上;所述喷水头18和自适应水头30喷水模拟雨水;所述喷水头18固定在整体外框1的左、右两侧内壁上;所述整体外框1内的降水通过整体外框1内部的排水口经过第二导水管5流入蓄水箱13内,为蓄水箱13提供水源补充。
15.所述自适应水头34固定在上框22上;所述上框设置在整体外框1上方;所述自适应水头34由两层具有相同孔隙的上层水头24和下层水头25组成;所述下层水头25上固定有控制导轨26;所述下层水头25与控制导轨26滑动配合,通过控制导轨26进行移动从而改变上层水头24和下层水头25之间的空隙。
16.所述风向车速模拟系统包括多个吹风系统;所述吹风系统包括两个侧向风系统19和一个正向风系统21。所述侧向风系统19安装在整体外框1内部的左右两侧;所述正向风系统21安装在整体外框1上自适应水头30的前方。
17.第二方面,本发明实施例提供了一种模拟真实降雨环境的车载相机在环测试方法,包括以下步骤:
18.步骤一、搭建一种面向智能网联汽车车载相机的硬件在环测试平台,包括所有部件的固定连接及水管之间的连接;
19.步骤二、对一种面向智能网联汽车车载相机的硬件在环测试平台中的屏幕显示20的位置进行校正,使被测相机15的视觉与屏幕显示20完全重合;
20.步骤三、通过屏幕显示20输出rgb图像模拟雨天情况下出雨滴外的其他测试场景要素;
21.步骤四、在蓄水箱13中加入10升水,打开雨刮系统17、可控水泵7、压力传感器8、第一电磁开关阀12、喷水头18,并检查是否运行正常,通过降雨需求及雨刮运行需求,调整雨刮系统17的运动速度,并调整可控水泵7的开闭,第一电磁开关阀12的开闭,自适应水头30的孔隙开度;模拟周围交通车由于轮胎运动产生的水雾调节第二电磁开关阀31、第三电磁开关阀32的开度;根据车速,风速的模拟需求,调整两个侧向风系统19的风速大小,正向风系统21的风速大小和风向。
22.所述自适应水头30中的一部分靠近前挡风玻璃16处产生的积水大部分落在前挡风玻璃16上,为模拟降落在挡风玻璃上的降雨;所述自适应水头30的另一部分距离前挡风玻璃16远,模拟自动驾驶汽车行驶时降落在车辆前方的降雨,这部分降雨不会落在车窗上;距离前挡风玻璃15较近处的水头孔隙直径参照高斯分布进行计算,孔径的均值为3mm,标准差为1mm,高斯分布如公式(1)所示;较远处的空隙分为10排及以上,最近一排孔隙直径为5mm,最远处1排空隙直径选择为1mm,以0.5mm为基准按照等差数列的形式确定每一排的孔隙直径,如公式(2)所示;
[0023][0024]
g(x)=d
max-nd·
△dꢀꢀꢀ
(2)
[0025]
式中,f(x)为距离挡风玻璃较近部分处的自适应水头孔隙直径;σ为距离挡风玻璃较近部分孔隙直径的标准差;μ为距离挡风玻璃较近部分孔隙直径的均值;g(x)为距离挡风玻璃较近部分处的自适应水头孔隙直径,d
max
为距离挡风玻璃较近部分处孔隙直径的最大值,δd为孔隙等差数列的差值,nd为距离最大孔隙排的等差数列的级数。
[0026]
所述第一电磁开关阀12的开启时间看作水滴产生的时间,将自适应水头30的每一个孔隙视为喷嘴,空隙的流量如公式(3)所示,流量与时间的乘积即得到每个孔隙所流出的水滴体积,如公式(4)所示;将每个流出的水滴形状近似为球形,得到流出水滴的直径大小,如公式(5)所示,根据试验所需的雨滴大小及所需降雨量的大小,调整第一电磁开关阀12开启和关闭的时间以及可控水泵(7)的开启关闭时间,进而同时控制公式(3)中的水压以及公式(4)中的电磁开关阀(12)开始时间;
[0027][0028]
v=q
·
t
ꢀꢀꢀ
(4)
[0029][0030]
式中,q为孔隙流量,k为阻力系数根据试验标定,p为水压,ρ为水的密度,t为第一电磁开关阀12开启时间,r为落下的水滴直径。
[0031]
吹风系统主要控制吹出的风速及风向,在车辆运动时,雨滴落到地面的速度大约为8-9m/s,使用vw进行替代,当智能网联汽车车速设定为vv时,正向风系统吹出的风速假设为vf,与相机在环测试平台内部底面所成的夹角为θ,通过调节vf与θ使能满足公式(6)、(7),则能模拟降雨时的正向情况
[0032]
vf·
sinθ=v
v-v
β
·
cosα
ꢀꢀꢀ
(6)
[0033][0034]
式中,g为重力系数,s为自适应水头距离相机在环测试平台底面的高度,v
β
为风速,α为风与车辆行驶方向的夹角;
[0035]
对于侧向风系统的控制,两个侧向风系统产生的风速大小vc应满足公式(8);
[0036]
vc=v
β
·
sinα
ꢀꢀꢀ
(8)。
[0037]
本发明的有益效果为:
[0038]
本发明使用数字rgb图像表现雨天环境下道路交通环境、道路、车辆等要素,使用真实水滴模拟雨天环境,解决现有方法使用简单的喷头方式进行雨滴模拟,这既无法保证落下时的雨滴形状,也无法真实模拟不同风速、车速情况对雨滴的影响的问题。
附图说明
[0039]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0040]
图1为本发明部分结构示意图;
[0041]
图2为本发明中基础框架的结构示意图;
[0042]
图3为自适应水头和前向吹风系统的结构示意图;
[0043]
图4为自适应水头孔隙的结构示意图;
[0044]
图5为自适应水头的结构示意图;
[0045]
图6为本发明模拟雨水的原理示意图。
[0046]
图中:
[0047]
1、整体外框;2、屏显系统;3、前挡风玻璃夹具;4、第一导水管;5、第二导水管;6、第三导水管;7、可控水泵;8、压力传感器;9、压力水室;10、第四导水管;11、第五导水管;12、第一电磁开关阀;13、蓄水箱;14、第六导水管;15、被测相机;16、前挡风玻璃;17、调整雨刮系统;18、喷水头;19、侧向风系统;20、屏幕显示;21、正向风系统;22、上框;23、入水头;24、上层水头;25、下层水头;26、控制导轨;27、第一屏幕可运动支架;28、第二屏幕可运动支架;30、自适应水头;31、第二电磁开关阀;32、第三电磁开关阀。
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
实施例一
[0050]
参阅图1,一种模拟真实降雨环境的车载相机在环测试平台,包括:
[0051]
基础框架,用于硬件在环测试平台的框架,能够放置车窗雨刷模拟系统、雨水模拟系统、风向车速模拟系统;
[0052]
车窗雨刷模拟系统,用于模拟雨水降落在前挡风玻璃;
[0053]
雨水模拟系统,用于模拟雨水;
[0054]
风向车速模拟系统,用于模拟不同风向、风速、车速条件下的雨滴状态。
[0055]
所述基础框架包括整体外框1和设置在整体外框1内部的屏显系统2。
[0056]
参阅图2,所述屏显系统2包括第一屏幕可运动支架27、第一屏幕可运动支架28和屏幕显示20。
[0057]
所述整体外框1为长方体,通过铝型材进行框架结构设计,并通过薄铝板将框架进
行整体包围,并在内部安装黑色吸光布。底部四个角落分别安装有底部支架,支架底部安装有可锁止万向轮用于台架的移动和固定。
[0058]
所述第一屏幕可运动支架27和第二屏幕可运动支架28均采用电子导轨;所述第一屏幕可运动支架27可以相对第二屏幕可运动支架28前后运动;所述第二屏幕可运动支架28和整体外框1后面的底座连接,并可进行上下运动。
[0059]
所述屏显系统2通过第一屏幕可运动支架27和第二屏幕可运动支架28完成上、下、前、后运动从而完成其与被测相机15之间的视角对齐.
[0060]
所述车窗雨刷模拟系统包括被测相机15、前挡风玻璃16、雨刮系统17和前挡风玻璃夹具3。
[0061]
所述前挡风玻璃夹具3可采用常见板状金属夹具,前挡风玻璃夹具3一方面通过螺栓连接在整体外框1内部底座上,一方面固定住前挡风玻璃16,从而完成前挡风玻璃16与整体外框1内部底座的固定,通过调节前挡风玻璃夹具3与相机在整体外框1内部底座平面的角度,可调节前挡风玻璃16与底座平面成40度至140度角。前挡风玻璃16、雨刮系统17选择被测自动驾驶汽车同一型号,被测相机15选择被测自动驾驶系统的前视相机同一型号。
[0062]
所述雨水模拟系统包括蓄水箱13、第一导水管4、第二导水管5、第三导水管6、第四导水管10、第五导水管11、第六导水管14、可控水泵7、压力传感器8、压力水室9、电磁开关阀12、自适应水头30、喷水头18、上框22和入水头23。
[0063]
蓄水箱13选择常见金属或塑料水箱即可,容积需大于10升,其作用是为整个雨水模拟系统提供水源,试验开始前需将蓄水箱13装满,在实验过程中整体外框1中的降水会通过平台内部的排水口经过第二导水管5流入蓄水箱13中为蓄水箱13提供水源补充;可控水泵7可通过开关电源进行自动运行,其作用为将蓄水箱13中的水泵入压力水室9中,保持压力水室9内的压力;压力水室9上安装有压力传感器8,压力传感器8时刻监督压力水室9中的压力,当压力水室9内的水压到达设定值时关闭可控水泵7的电流;压力水室9流出的水分为三部分,其中一部分流入第一电磁开关阀12中,该阀体通过入水头23为后续的自适应水头30供水,另外两部分流入喷水头中,喷水头模拟自动汽车在道路行驶时由于周围车辆轮胎挤压路面积水所形成的密集水雾;自适应水头30通过螺栓固定在上框22上,其由两层具有相同孔隙的水头组成,下层水头25可以通过控制导轨26进行移动从而改变两层水头之间的空隙,达到改变水滴大小及速度的作用,第二部分流出的水通过第一导水管4及第二电磁开关阀31流入喷水头18中;第三部分流出的水通过第六导水管14及第三电磁开关阀32流入喷水头18;所述喷水头18固定在整体外框1的内壁上;所述喷水头18固定在整体外框1的左、右两侧内壁上;所述整体外框1内的降水通过整体外框1内部的排水口经过第二导水管5流入蓄水箱13内,为蓄水箱13提供水源补充。
[0064]
参阅图3、图4和图5,所述自适应水头30固定在上框22上;所述上框设置在整体外框1上方;所述自适应水头30由两层具有相同孔隙的上层水头24和下层水头25组成;所述下层水头25上固定有控制导轨26;所述下层水头25与控制导轨26滑动配合,通过控制导轨26进行移动从而改变上层水头24和下层水头25之间的空隙。
[0065]
参阅图6,所述风向车速模拟系统包括多个吹风系统;所述吹风系统包括两个侧向风系统19和一个正向风系统21;所述侧向风系统19安装在整体外框1内部的左右两侧,其作用时模拟车辆行驶时风向与车辆行驶方向成一定夹角时的状态;所述正向风系统21安装在
整体外框1上自适应水头30的前方,用来模拟车辆以不同车速行驶时雨滴与前挡风玻璃之间的相对运动状态。
[0066]
实施例二
[0067]
一种模拟真实降雨环境的车载相机在环测试方法,通过一种模拟真实降雨环境的车载相机在环测试平台实现,包括以下步骤:
[0068]
步骤一、搭建一种面向智能网联汽车车载相机的硬件在环测试平台,包括所有部件的固定连接及水管之间的连接;
[0069]
步骤二、对一种面向智能网联汽车车载相机的硬件在环测试平台中的屏幕显示20的位置进行校正,使被测相机15的视觉与屏幕显示20完全重合;
[0070]
步骤三、通过屏幕显示20输出rgb图像模拟雨天情况下出雨滴外的其他测试场景要素;
[0071]
步骤四、在蓄水箱13中加入10升水,打开雨刮系统17、可控水泵7、压力传感器8、第一电磁开关阀12、喷水头18,并检查是否运行正常,通过降雨需求及雨刮运行需求,调整雨刮系统17的运动速度,并调整可控水泵7的开闭,第一电磁开关阀12的开闭,自适应水头,30的孔隙开度;模拟周围交通车由于轮胎运动产生的水雾调节第二电磁开关阀31、第三电磁开关阀32的开度;根据车速,风速的模拟需求,调整两个侧向风系统19的风速大小,正向风系统21的风速大小和风向。
[0072]
参阅图4,其中,所述自适应水头30的作用分为两部分,一部分靠近前挡风玻璃16处产生的积水大部分落在前挡风玻璃16上,为模拟降落在挡风玻璃上的降雨,主要考虑落在挡风玻璃上的雨滴大小分布;所述自适应水头30的另一部分距离前挡风玻璃16远,模拟自动驾驶汽车行驶时降落在车辆前方的降雨,这部分降雨不会落在车窗上,其主要需要考虑图像模拟时的距离模拟,通过三角成像原理,距离前挡风越远处的孔隙的孔径应该越小;距离前挡风玻璃15较近处的水头孔隙直径参照高斯分布进行计算,孔径的均值为3mm,标准差为1mm,高斯分布如公式(1)所示;较远处的空隙分为10排及以上,排数多少根据所需模拟的精度进行自适应水头定制,最近一排孔隙直径为5mm,最远处1排空隙直径选择为1mm,以0.5mm为基准按照等差数列的形式确定每一排的孔隙直径,如公式(2)所示;
[0073][0074]
g(x)=d
max-nd·
△dꢀꢀꢀ
(2)
[0075]
式中,f(x)为距离挡风玻璃较近部分处的自适应水头孔隙直径;σ为距离挡风玻璃较近部分孔隙直径的标准差;μ为距离挡风玻璃较近部分孔隙直径的均值;g(x)为距离挡风玻璃较近部分处的自适应水头孔隙直径,d
max
为距离挡风玻璃较近部分处孔隙直径的最大值,δd为孔隙等差数列的差值,nd为距离最大孔隙排的等差数列的级数。
[0076]
所述第一电磁开关阀12主要控制想要形成的雨滴大小,当第一电磁开关阀12完全关闭时,自适应水头30完全关闭,无法向外排出水滴,第一电磁开关阀12开启时间可看作水滴产生时间.将自适应水头30的每一个孔隙视为喷嘴,空隙的流量如公式(3)所示,流量与时间的乘积即得到每个孔隙所流出的水滴体积,如公式(4)所示;将每个流出的水滴形状近似为球形,得到流出水滴的直径大小,如公式(5)所示,根据试验所需的雨滴大小,调整第一
电磁开关阀12开启和关闭的时间;
[0077][0078]
v=q
·
t
ꢀꢀꢀ
(4)
[0079][0080]
式中,q为孔隙流量,k为阻力系数根据试验标定,p为水压,ρ为水的密度,t为第一电磁开关阀12开启时间,r为落下的水滴直径。
[0081]
喷水头控制系统较为简单,其无需进行复杂的计算,其仅需根据试验需要选择开启时间即可。
[0082]
自适应水头30与电磁开关阀12配合,在水压固定的情况下,参照公式(3)-(5)调节获取不同雨滴大小情况,当对降雨量和雨滴大小同时有要求时,需根据公式(3)-(5)协调控制电磁开关阀12的开闭时间和可控水泵7的运行时间,从而获取不同降雨量,不同雨滴大小下的降雨情况。
[0083]
吹风系统主要控制吹出的风速及风向,在车辆运动时,雨滴落到地面的速度大约为8-9m/s,使用vw进行替代,当智能网联汽车车速设定为vv时,正向风系统吹出的风速假设为vf,与相机在环测试平台内部底面所成的夹角为θ,通过调节vf与θ使能满足公式(6)、(7),则能模拟降雨时的正向情况
[0084]
vf·
sinθ=v
v-v
β
·
cosα
ꢀꢀꢀ
(6)
[0085][0086]
式中,g为重力系数,s为自适应水头距离相机在环测试平台底面的高度,v
β
为风速,α为风与车辆行驶方向的夹角;
[0087]
对于侧向风系统的控制,两个侧向风系统产生的风速大小vc应满足公式(8);
[0088]
vc=v
β
·
sinα
ꢀꢀꢀ
(8)。
[0089]
以上结合附图详细描述了本发明的优选实施方式,但是,本发明的保护范围并不局限于上述实施方式中的具体细节,在本发明的技术构思范围内,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,这些简单变型均属于本发明的保护范围。
[0090]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
[0091]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1