静止轨道卫星帆板太阳角计在轨自主诊断方法及系统与流程
1.本发明涉及空间飞行器总体技术领域,具体地,涉及静止轨道卫星帆板太阳角计在轨自主诊断方法及系统。
背景技术:
2.由于太阳是一个非常明亮的点光源,易于敏感与识别,给敏感器的设计和姿态确定算法的制定带来极大方便,因此太阳敏感器成为各种航天器首选的姿态敏感部件。太阳敏感器不但可用于星体姿态的测量,而且可直接用于太阳电池阵的定位与星敏感器的保护等广泛的用途。根据工程中的技术要求,太阳敏感器的视场可设计为几分的小视场到128
°×
128
°
的大视场,分辨率可达到秒的量级。
3.太阳敏感器有三种基本类型。太阳出现敏感器(0-1式太阳敏感器),输出信号是恒定的,用以表示太阳是否出现在视场内;模拟式太阳敏感器,输出信号是太阳角的连续函数;数字式太阳敏感器,输出信号是太阳角的编码形式的离散函数。本发明方法所述的帆板太阳角计属于模拟式太阳敏感器,其视场为几十度、精度可达
±1°
,用于卫星太阳电池阵对日捕获与跟踪。该型太阳敏感器已经广泛应用于fy-3、fy-4、gf-5系列卫星控制系统与太阳阵跟踪系统。
4.太阳阵能否稳定对日跟踪关系到卫星能源安全,而帆板太阳角计作为帆板对日闭环控制的输入,其工作状态直接影响帆板对日跟踪能力。本发明方法面向工程实际,利用帆板太阳角计工作原理及信号特性,提出了一种静止轨道卫星太阳角计在轨自主诊断方法。本发明可应用于卫星控制系统或太阳阵跟踪系统研制研发过程。
5.专利申请号为:cn201610081893.6,名称为:一种可靠太阳帆板自主跟踪太阳控制方法,介绍了根据太阳模型和卫星轨道完成帆板转动目标角度计算及通过增量调整和停转保持的方法调整太阳跟踪角,但未阐述静止轨道卫星帆板太阳角计在轨自主诊断方法。
6.专利号为2015106168439、名称为“一种双轴微型模拟式太阳敏感器”,介绍了一种双轴微型模拟式太阳敏感器,详细描述了该敏感器的组成结构与工作原理,但未阐述静止轨道卫星帆板太阳角计在轨自主诊断方法。
7.专利号为2017103386430、名称为“一种两轴纳型精太阳敏感器”,介绍了一种两轴纳型精太阳敏感器,详细描述了该敏感器的组成结构与工作原理,但未阐述静止轨道卫星帆板太阳角计在轨自主诊断方法。
8.专利文献cn107014398b(申请号:201710240152.2)公开了一种卫星模拟太阳敏感器故障检测方法及装置,该方法包括:获取模拟太阳敏感器在当前周期的遥测数据;根据遥测数据,确定当前周期内卫星工作模式是否为预设模式;若为预设模式,则通过联合诊断方式计算模拟太阳敏感器输出角度的预测值;根据预测值和遥测数据包括的输出角度的遥测值,判断模拟太阳敏感器在当前周期是否出现故障。本发明实施例以联合诊断方式计算输出角度的预测值,结合预测值和遥测数据包含的遥测值,定量诊断是否出现故障,及时快速地发现遥测数据的异常变化,提高卫星在轨自主诊断及地面测试数据判读的精确性和可靠
性。
技术实现要素:
9.针对现有技术中的缺陷,本发明的目的是提供一种静止轨道卫星帆板太阳角计在轨自主诊断方法及系统。
10.根据本发明提供的一种静止轨道卫星帆板太阳角计在轨自主诊断方法,包括:
11.步骤s1:将帆板太阳角计测得的电流数据进行野值剔除处理,得到电流剔野数据;
12.步骤s2:将电流剔野数据进行平滑滤波处理,得到电流平滑滤波数据;
13.步骤s3:电流平滑滤波数据进行太阳跟踪角解算,得到三组太阳跟踪角;
14.步骤s4:根据三组太阳跟踪角计算两两之间差值并与太阳角计故障阈值相比较,判断太阳角计是否故障。
15.优选地,所述帆板太阳角计包括:预设数量的太阳电池片及光栏;太阳光通过光栏后照射在预设数量的太阳电池片上,太阳电池片的照射感光面积随太阳入射角度变化而变化,从而使得预设数量的太阳电池片的输出电流相应发生改变。
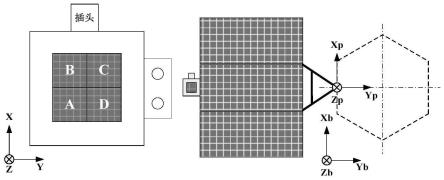
16.优选地,所述太阳跟踪角作为太阳阵与太阳之间相对关系的表征量,太阳跟踪角为太阳方向矢量在xpopzp面上的投影和太阳电池阵法线的夹角。
17.优选地,通过野值剔除和平滑滤波的方法提取太阳角计输出电流测量数据中的有效信息。
18.优选地,所述步骤s3采用:控制计算机通过ad采样将太阳角计输出的四路电流模拟信号转化为数字量;根据太阳角计特性,四路电流信号解算为三组太阳跟踪角。
19.优选地,星上自主计算卫星光照情况,当卫星处于阴影期时,不进行太阳角计星上自主诊断。
20.优选地,当卫星位于阴影区时,太阳角计各电池片输出电流均为零,无法利用太阳角计输出电流来解算太阳跟踪角,并无法进行太阳角计故障诊断,因此阴影期间不进行在轨自主故障诊断。
21.根据本发明提供的一种静止轨道卫星帆板太阳角计在轨自主诊断系统,包括:
22.模块m1:将帆板太阳角计测得的电流数据进行野值剔除处理,得到电流剔野数据;
23.模块m2:将电流剔野数据进行平滑滤波处理,得到电流平滑滤波数据;
24.模块m3:电流平滑滤波数据进行太阳跟踪角解算,得到三组太阳跟踪角;
25.模块m4:根据三组太阳跟踪角计算两两之间差值并与太阳角计故障阈值相比较,判断太阳角计是否故障。
26.优选地,所述帆板太阳角计包括:预设数量的太阳电池片及光栏;太阳光通过光栏后照射在预设数量的太阳电池片上,太阳电池片的照射感光面积随太阳入射角度变化而变化,从而使得预设数量的太阳电池片的输出电流相应发生改变;
27.所述太阳跟踪角作为太阳阵与太阳之间相对关系的表征量,太阳跟踪角为太阳方向矢量在xpopzp面上的投影和太阳电池阵法线的夹角。
28.优选地,星上自主计算卫星光照情况,当卫星处于阴影期时,不进行太阳角计星上自主诊断;
29.当卫星位于阴影区时,太阳角计各电池片输出电流均为零,无法利用太阳角计输
出电流来解算太阳跟踪角,并无法进行太阳角计故障诊断,因此阴影期间不进行在轨自主故障诊断。
30.与现有技术相比,本发明具有如下的有益效果:
31.本发明提供的静止轨道卫星帆板太阳角计在轨自主诊断方法利用帆板太阳角计工作原理及信号特性,按照三种计算方式得到三组帆板太阳跟踪角,通过比较三组跟踪角之间的相对关系判断太阳角计是否正常工作。按照本发明提供的诊断方法,无需地面人员介入,由卫星在轨自主完成诊断,能够第一时间发现故障并采取应对措施,保证卫星太阳阵能够实时对准太阳,确保整星能源安全。
附图说明
32.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
33.图1为帆板太阳角计及其工作原理示意图。
34.图2为帆板太阳角计信号定义及安装位置示意图。
35.图3为太阳角计电流信号剔野流程图。
36.图4为太阳角计电流信号平滑滤波流程图。
37.图5为太阳角计故障诊断流程图。
具体实施方式
38.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
39.实施例1
40.根据本发明提供的一种静止轨道卫星帆板太阳角计在轨自主诊断方法,包括:
41.步骤s1:将帆板太阳角计测得的电流数据进行野值剔除处理,得到电流剔野数据;
42.步骤s2:将电流剔野数据进行平滑滤波处理,得到电流平滑滤波数据;
43.步骤s3:电流平滑滤波数据进行太阳跟踪角解算,得到三组太阳跟踪角;
44.步骤s4:根据三组太阳跟踪角计算两两之间差值并与太阳角计故障阈值相比较,判断太阳角计是否故障。
45.优选地,所述帆板太阳角计包括:预设数量的太阳电池片及光栏;太阳光通过光栏后照射在预设数量的太阳电池片上,太阳电池片的照射感光面积随太阳入射角度变化而变化,从而使得预设数量的太阳电池片的输出电流相应发生改变。
46.优选地,所述太阳跟踪角作为太阳阵与太阳之间相对关系的表征量,太阳跟踪角为太阳方向矢量在xpopzp面上的投影和太阳电池阵法线的夹角。
47.优选地,通过野值剔除和平滑滤波的方法提取太阳角计输出电流测量数据中的有效信息。
48.优选地,所述步骤s3采用:控制计算机通过ad采样将太阳角计输出的四路电流模拟信号转化为数字量;根据太阳角计特性,四路电流信号解算为三组太阳跟踪角。
49.优选地,星上自主计算卫星光照情况,当卫星处于阴影期时,不进行太阳角计星上自主诊断。
50.优选地,当卫星位于阴影区时,太阳角计各电池片输出电流均为零,无法利用太阳角计输出电流来解算太阳跟踪角,并无法进行太阳角计故障诊断,因此阴影期间不进行在轨自主故障诊断。
51.根据本发明提供的一种静止轨道卫星帆板太阳角计在轨自主诊断系统,包括:
52.模块m1:将帆板太阳角计测得的电流数据进行野值剔除处理,得到电流剔野数据;
53.模块m2:将电流剔野数据进行平滑滤波处理,得到电流平滑滤波数据;
54.模块m3:电流平滑滤波数据进行太阳跟踪角解算,得到三组太阳跟踪角;
55.模块m4:根据三组太阳跟踪角计算两两之间差值并与太阳角计故障阈值相比较,判断太阳角计是否故障。
56.优选地,所述帆板太阳角计包括:预设数量的太阳电池片及光栏;太阳光通过光栏后照射在预设数量的太阳电池片上,太阳电池片的照射感光面积随太阳入射角度变化而变化,从而使得预设数量的太阳电池片的输出电流相应发生改变;
57.所述太阳跟踪角作为太阳阵与太阳之间相对关系的表征量,太阳跟踪角为太阳方向矢量在xpopzp面上的投影和太阳电池阵法线的夹角。
58.优选地,星上自主计算卫星光照情况,当卫星处于阴影期时,不进行太阳角计星上自主诊断;
59.当卫星位于阴影区时,太阳角计各电池片输出电流均为零,无法利用太阳角计输出电流来解算太阳跟踪角,并无法进行太阳角计故障诊断,因此阴影期间不进行在轨自主故障诊断。
60.实施例2
61.实施例2是实施例1的优选例
62.本发明以帆板太阳角计4路输出电流作为输入,利用其工作原理及信号特性,按照三种计算方式得到三组帆板太阳跟踪角,通过比较三组跟踪角之间的相对关系判断太阳角计是否正常工作。
63.具体地,根据本发明提供的静止轨道卫星帆板太阳角计在轨自主诊断方法,包括如下步骤:
64.步骤s1:将帆板太阳角计测得的电流数据进行野值剔除处理。
65.步骤s2:将步骤s1得到的电流剔野数据进行平滑滤波处理。
66.步骤s3:以步骤s2得到的电流平滑滤波数据进行太阳跟踪角解算,得到三组太阳跟踪角。
67.步骤s4:以步骤s3得到的三组太阳跟踪角作为输入,计算两两之间差值并与太阳角计故障阈值相比较,判断太阳角计是否故障。
68.步骤s5:星上自主计算卫星光照情况,当卫星处于阴影期时,不进行太阳角计星上自主诊断。
69.具体地,所述步骤s1包括:帆板太阳角计由4片太阳电池片及光栏组成,如附图1至图2所示,太阳光通过光栏后照射在4片太阳电池片上,太阳电池片的照射感光面积随太阳入射角度变化而改变,从而4片太阳电池片的输出电流相应发生改变。以太阳角计电池片输
出电流im,m=a,b,c,d作为输入信号分别进行剔野处理,若当前计算周期的电流信号相对上一周期出现跳变,将跳变值与电流跳变阈值δi
gate
进行比较,如果连续十个计算周期电流跳变值均大于阈值则认为电流跳变真实发生、当前电流信号值为真值,否则,认为该跳变为野值,保持上一周期电流信号值。剔野流程如附图3所示,图中,i_in_now为当前计算周期太阳角计电流输出值,i_out_last为上一计算周期剔野后结果,i_out_now为当前计算周期剔野后结果,counter为计数器。
70.优选地,所述步骤s2包括:以步骤s1得到的太阳角计电流剔野后信号作为输入,以十个计算周期的信号数据作为滤波对象进行均值滤波。滤波过程如附图4所示,图中,i_in_now为剔野后得到的太阳跟踪角,i_out_last为上一计算周期平滑滤波后结果,i_out_now为当前计算周期平滑滤波后结果,thita_array为滤波队列,counter为计数器。计算方法如下:
[0071][0072]
具体地,所述步骤s3包括:以步骤s2得到的太阳角计电流滤波后信号作为输入,根据其物理关系将电流值转化为太阳跟踪角,如下式:
[0073][0074][0075][0076]
式中,ia、ib、ic、id分别为太阳角计4块太阳电池片输出电流,i
gate
为电池片电流和阈值,k1、k2、k3为太阳跟踪角计算系数,可通过地面测试进行标定,缺省值为1。
[0077]
具体地,所述步骤s4包括:以步骤s3计算得到的三组太阳跟踪角作为输入,分别计算两两之间差值δθ
12
、δθ
23
、δθ
31
,将三个差值分别与太阳角计故障阈值δθ
gate
进行比较,每一个差值均小于故障阈值δθ
gate
时,认为太阳角计工作正常,太阳跟踪角计算结果可用。δθ
12
、δθ
23
、δθ
31
任意一项连续十个计算周期大于故障阈值δθ
gate
则认为太阳角计工作异常,太阳跟踪角计算结果不可用。太阳角计故障诊断流程如附图5所示,图中,thita_out为当前计算周期太阳跟踪角输出值,thita_out_last为上一计算周期太阳跟踪角输出值,thita_as1为当前计算周期计算方式1得到的太阳跟踪角,counter1为计数器。
[0078]
优选地,所述步骤s5包括:星上控制计算机实时根据卫星轨道、太阳轨道、月球轨道计算星—地—日及星—月—日关系判断卫星是否处于阴影期。
[0079]
卫星星—地—日夹角可通过下式进行计算:
[0080][0081]
式中,为地心到卫星矢量,为地心到太阳矢量。
[0082]
地影门限可通过下式进行计算:
[0083][0084]
式中,r
earth
为地球半径,r
sun
为太阳半径,r
sat_earth
为星地距离,r
earth_sun
为日地距离。
[0085]
卫星星—月—日夹角可通过下式进行计算:
[0086][0087]
式中,为月球到卫星矢量,为月球到太阳矢量。
[0088]
月影门限可通过下式进行计算:
[0089][0090]
式中,r
moon
为月球半径,r
sun
为太阳半径,r
sat_moon
为星月距离,r
moon_sun
为月日距离。
[0091]
当ang
sat_earth_sun
》umbragate||ang
sat_moon_sun
》eclipsegate成立时,卫星位于阴影区。当卫星位于阴影期时,不进行帆板太阳角计星上自主故障诊断,使用步骤s3中第一组计算结果θ
as1
作为当前周期帆板太阳跟踪角。
[0092]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0093]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1