基于张量特征值的航磁异常边界检测方法、装置与流程
1.本发明是关于航空磁测技术领域,特别是关于一种基于张量特征值的航磁异常边界检测方法、装置。
背景技术:
2.航空磁力测量是将航空磁力仪(例如光泵式、核旋式和磁通门式)系统安装在飞行器,中通过观测地磁场参数(例如地磁场总强度t或总磁场异常
△
t或其梯度),来寻找磁性或与磁性有关的矿体,以了解地质构造、进行磁性填图、解决城市和工程稳定性和考古等问题。
3.航空磁测主要是研究、量度磁力异常场。磁力异常场是地壳中的含铁磁性地质体在地磁场作用下所产生的附加磁场。航空磁力测量数据是不同深度、不同形态、不同规模的磁性地质体磁场信息在观测面上的综合反映。但是,由于测量数据的误差或磁场的叠加,使得测量数据难以区分,给地质解释工作带来了难度。
4.工程技术与磁梯度张量探测仪器研发技术的不断地发展与成熟,应用磁力张量数据在分析、处理上述问题也得到了相应的发展。磁力张量数据是磁场矢量分量的梯度,包含了的磁场信息,能够反映目标体的矢量磁矩信息,张量数据具有高精度、高分辨率、多参量的优点,可用于描述场源体的磁化方向和几何形态,提高对目标地质体的分辨率。
5.目前,可以通过构造基于张量特征值的均衡边界识别滤波器bs方法,提高对目标地质体的分辨率。
6.基于此,本技术的发明人发现,目前的均衡边界识别滤波器bs方法提高了一定的识别效果,但在实际的航磁数据处理与解释过程中,其存在精度低、稳定性和抗噪能力差、不能有效的均衡深浅异常的振幅,尤其是当正负航磁异常相互叠加、相互影响时容易产生虚假的边界结果,对后期构造解释会产生干扰和误导。
7.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
8.本发明的目的在于提供一种基于张量特征值的航磁异常边界检测方法、装置,其能够解决现有的航磁数据处理结果精度低、稳定性和抗噪能力差、不能有效的均衡深浅异常的振幅,尤其是当正负航磁异常相互叠加、相互影响时容易产生虚假的边界结果,对后期构造解释会产生干扰和误导。
9.为实现上述目的,本发明提供了一种基于张量特征值的航磁异常边界检测方法,包括:获取全磁力梯度张量数据矩阵t,其中,所述全磁力梯度张量数据矩阵t包括三维直角坐标系下,x,y,z三个方向的磁场分量分别在x,y,z方向的9个一阶梯度分量;根据所述全磁力梯度张量数据矩阵t建立边界检测函数r以及深度分辨力增益因子tz;分别计算r在x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz;根据所述x方向水平梯度r
x
、y方向水平
梯度ry和z方向垂向梯度rz以及深度分辨力增益因子tz以及全磁力梯度张量数据矩阵t建立均衡边界识别滤波器mf;根据均衡边界识别滤波器mf以及实测的航磁数据,实现航磁异常边界检测。
10.在本发明的一实施方式中,所述根据所述x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz以及深度分辨力增益因子tz以及全磁力梯度张量数据矩阵t建立均衡边界识别滤波器mf包括:
11.根据以下公式建立均衡边界识别滤波器mf,所述公式包括:
[0012][0013]
其中,k是取值为0-1的调节系数,max(|r|)为边界检测函数r的最大值。
[0014]
在本发明的一实施方式中,获取全磁力梯度张量数据矩阵t,包括:
[0015]
获取实测的航磁数据;根据三维直角坐标系确定航磁数据在x,y,z三个方向的磁场分量以及每个磁场分量分别在x,y,z方向的一阶梯度分量,9个所述一阶梯度分量构成全张量磁梯度数据。
[0016]
在本发明的一实施方式中,所述
[0017][0018]
在本发明的一实施方式中,所述根据所述全磁力梯度张量数据矩阵t建立边界检测函数r包括:根据所述全磁力梯度张量数据矩阵t计算得到该矩阵的三个特征值λ1、λ2、λ3;根据所述全磁力梯度张量数据矩阵t计算得到该矩阵的总模值m;根据所述全磁力梯度张量数据矩阵的特征值λ1、λ2、λ3和所述全磁力梯度张量数据矩阵的总模值m,建立边界检测函数r,其中,r=λ1·
λ2·
λ3·
m。
[0019]
在本发明的一实施方式中,所述全磁力梯度张量总模值m包含了全部9个张量元素的信息,其最大值对应着地质体的边界,
[0020]
在本发明的一实施方式中,所述根据所述全磁力梯度张量数据矩阵t建立深度分辨力增益因子tz包括:根据以下公式,计算深度分辨力增益因子tz,所述公式为:
[0021][0022]
在本发明的一实施方式中,根据以下公式计算均衡深浅部异常的调节系数k,所述计算公式为:
[0023][0024]
其中,max|tz|表示tz最大值;max|t
zz
|表示t
zz
最小值。
[0025]
为实现上述目的,本发明还提供了一种基于张量特征值的航磁异常边界检测的装置,包括:
[0026]
获取模块,用于获取全磁力梯度张量数据矩阵t,其中,所述全磁力梯度张量数据矩阵t包括三维直角坐标系下,x,y,z三个方向的磁场分量分别在x,y,z方向的9个一阶梯度分量;
[0027]
边界检测函数建立模块,用于根据所述全磁力梯度张量数据矩阵t建立边界检测函数r以及深度分辨力增益因子tz;
[0028]
梯度计算模块,用于分别计算r在x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz;
[0029]
均衡边界识别滤波器建立模块,用于根据所述x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz以及深度分辨力增益因子tz以及全磁力梯度张量数据矩阵t建立均衡边界识别滤波器mf;
[0030]
检测模块,用于根据均衡边界识别滤波器mf以及实测的航磁数据,实现航磁异常边界检测。
[0031]
为实现上述目的,本发明提供了一种存储介质,所述存储介质存储有计算机可执行指令,所述计算机可执行指令用于执行上述的基于张量特征值的航磁异常边界检测方法。
[0032]
与现有技术相比,根据本发明的基于张量特征值的航磁异常边界检测方法,新构建了一个合理的均衡航磁数据目标地质体边界检测方法,能更好的探测出埋深不同的多源场物体的边界,使边界识别结果更收敛,且该方法有效地避免了磁化方向和噪声对结果的干扰,提高了计算稳定性和虚假航磁地质体边界;利用比值函数可均衡不同深度地质体的效应,从而能很清晰地给定较深目标地质体的分布特征,具有更高的分辨率和精度。
附图说明
[0033]
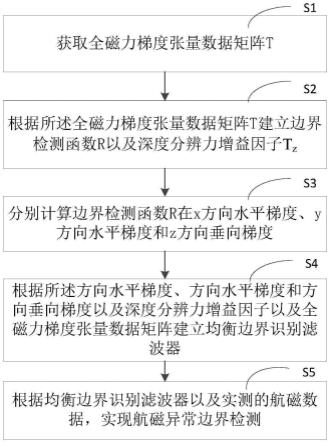
图1是根据本发明一实施方式的基于张量特征值的航磁异常边界检测方法的流程图;
[0034]
图2是根据本发明一实施方式的基于张量特征值的航磁异常边界检测装置的结构示意图。
[0035]
主要附图标记说明:
[0036]
1-获取模块,2-边界检测函数建立模块,3-梯度计算模块,4-均衡边界识别滤波器建立模块,5-检测模块。
具体实施方式
[0037]
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0038]
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
[0039]
本发明实施例提供一种基于张量特征值的航磁异常边界检测方法的,参见图1,其为基于张量特征值的航磁异常边界检测方法的流程图,包括:步骤s1-步骤s5。
[0040]
步骤1,获取全磁力梯度张量数据矩阵t,其中,所述全磁力梯度张量数据矩阵t包括三维直角坐标系下,x,y,z三个方向的磁场分量分别在x,y,z方向的9个一阶梯度分量。
[0041]
在一种实现方式中,全磁力梯度张量数据矩阵t可以通过实测全磁力梯度张量数据来获取,或者,可以通过以下步骤获取:
[0042]
获取实测的航磁数据;
[0043]
根据三维直角坐标系确定磁场数据在x,y,z三个方向的磁场分量以及每个磁场分量分别在x,y,z方向的一阶梯度分量,9个所述一阶梯度分量构成全张量磁梯度数据。具体的,航磁数据为地下磁性地质体引起的磁异常信号。
[0044]
其中,
[0045]
步骤2,根据所述全磁力梯度张量数据矩阵t建立边界检测函数r以及深度分辨力增益因子tz。
[0046]
在一种实现方式中,步骤2中的根据所述全磁力梯度张量数据矩阵t建立边界检测函数r可以包括:
[0047]
步骤201,根据所述全磁力梯度张量数据矩阵t计算得到该矩阵的三个特征值λ1、λ2、λ3,其中,所述全磁力梯度张量数据矩阵的特征值λ1、λ2、λ3均对应着航磁数据目标地质体的边界。但是特征值λ1、λ2、λ3对深部目标地质体的分辨率不高。
[0048]
步骤202,根据所述全磁力梯度张量数据矩阵t计算得到该矩阵的总模值m。
[0049]
具体的,全磁力梯度张量总模值m包含了全部9个张量元素的信息,其最大值对应着地质体的边界,其中,其最大值对应着地质体的边界,但是其识别精度较低。
[0050]
步骤203,根据所述全磁力梯度张量数据矩阵的特征值λ1、λ2、λ3和所述全磁力梯度张量数据矩阵的总模值m,建立边界检测函数r。
[0051]
r同时具备了张量特征值和总模值的属性,能够提高对浅部目标地质体的识别精度,但检测深部目标地质体的分辨率低,所以需要进一步提高检测深部目标地质体的边界的能力。
[0052]
其中,r=λ1·
λ2·
λ3·
m。
[0053]
在一种实现方式中,步骤2中的根据所述全磁力梯度张量数据矩阵t建立深度分辨
力增益因子tz,可以包括:
[0054]
根据以下公式计算深度分辨力增益因子tz,所述公式为:
[0055]
由此,可以提高垂向探测能力,即提高检测深部目标地质体的边界的能力。
[0056]
步骤3,分别计算r在x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz,其中
[0057]
步骤4,根据所述x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz以及深度分辨力增益因子tz以及全磁力梯度张量数据矩阵t建立均衡边界识别滤波器mf;
[0058]
其中,表达式为:
[0059][0060]
即:
[0061][0062]
其中,k是均衡深浅部异常的调节系数,一般取值为0-1,用来调节边界识别结果的振幅大小,从而提高结果的收敛性,同时使公式具有数学意义。k在不同的地质条件下的取值有所不同,k的优选取值参阅以下步骤。
[0063]
具体的,k的优选取值的选取可以通过以下步骤实现:
[0064]
获取边界检测函数r的最大值max(|r|);
[0065]
根据全磁力梯度张量数据矩阵t和深度分辨力增益因子tz计算max|tz|和max|t
zz
|,进一步确定均衡深浅部异常的调节系数k的取值;
[0066][0067]
其中,max|tz|表示tz最大值;max|t
zz
|表示t
zz
最小值。
[0068]
根据如下公式,计算得到改进后的边界检测均衡滤波器mf;
[0069][0070]
步骤5,根据均衡边界识别滤波器mf以及实测的航磁数据,实现航磁异常边界检测。
[0071]
根据均衡边界识别滤波器mf以及实测的航磁数据,得到精确的航磁边界,进而到航磁数据地质目标体的位置。
[0072]
在根据上述步骤得构建均衡边界mf滤波器之后,可以得到航磁数据地质目标体的位置,从而进一步准确推断构造体场源的边界、深度、产状、规模及场分布规律和物理性质等,对划分大地构造单元、进行构造分区、确定断裂构造带的位、区分不同岩性与地层的分
布及进行物性填图等问题有重要意义。
[0073]
与现有的bs表达式对比:
[0074][0075]
通过本实施例提供的基于张量特征值的航磁异常边界检测方法,与现有的bs滤波器相比,新构建了一个合理的均衡航磁数据目标地质体边界检测方法,能更好的探测出埋深不同的多源场物体的边界,使边界识别结果更收敛,且该方法有效地避免了磁化方向和噪声对结果的干扰,提高了计算稳定性和虚假航磁数据地质体边界;利用比值函数可均衡不同深度地质体的效应,从而能很清晰地给定较深目标地质体的分布特征,具有更高的分辨率和精度。
[0076]
本发明实施例还提供了一种基于张量特征值的航磁异常边界检测装置,请参阅图2,其为基于张量特征值的航磁异常边界检测装置的结构示意图,包括:获取模块1、边界检测函数建立模块2、梯度计算模块3,均衡边界识别滤波器建立模块4,以及检测模块5。
[0077]
获取模块1用于获取全磁力梯度张量数据矩阵t,其中,所述全磁力梯度张量数据矩阵t包括三维直角坐标系下,x,y,z三个方向的磁场分量分别在x,y,z方向的9个一阶梯度分量。
[0078]
边界检测函数建立模块2用于根据所述全磁力梯度张量数据矩阵t建立边界检测函数r以及深度分辨力增益因子tz。
[0079]
梯度计算模块3用于分别计算r在x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz。
[0080]
均衡边界识别滤波器建立模块用于根据所述x方向水平梯度r
x
、y方向水平梯度ry和z方向垂向梯度rz以及深度分辨力增益因子tz以及全磁力梯度张量数据矩阵t建立均衡边界识别滤波器mf。
[0081]
检测模块5用于根据均衡边界识别滤波器mf以及实测的航磁数据,实现航磁异常边界检测。
[0082]
本发明实施例还提供了一种存储介质,所述存储介质存储有计算机可执行指令,其包含用于执行上述基于张量特征值的航磁异常边界检测方法的程序,该计算机可执行指令可执行上述任意方法实施例中的方法。
[0083]
其中,所述存储介质可以是计算机能够存取的任何可用介质或数据存储设备,包括但不限于磁性存储器(例如软盘、硬盘、磁带、磁光盘(mo)等)、光学存储器(例如cd、dvd、bd、hvd等)、以及半导体存储器(例如rom、eprom、eeprom、非易失性存储器(nand flash)、固态硬盘(ssd))等。
[0084]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0085]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流
程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0086]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0087]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0088]
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1