一种激光雷达的探测方法及探测装置与流程
本技术属于激光雷达探测,尤其涉及一种激光雷达的探测方法及探测装置。
背景技术:
1、目前激光雷达在智慧交通、自动驾驶、辅助驾驶、导航、测绘、气象、航天、机器人等领域中,而传统的半固态激光雷达的扫描模块出射的每帧探测光在激光雷达的扫描工作模式确定后,激光雷达对于同一扫描区域只能采用固定的扫描分辨率,导致激光雷达的激光扫描灵活性比较差,导致扫描分辨能力不足,无法适应不同应用场景的探测要求。
2、现有技术的激光雷达对于不同的应用场景来说,存在扫描分辨能力不足,在各应用场景的探测能力不足的问题。
技术实现思路
1、本技术实施例提供了一种激光雷达的探测方法及探测装置,解决了激光雷达在各应用场景的的扫描分辨能力不足,从而导致探测能力不足的问题。
2、本技术实施例第一方面提供了一种激光雷达的探测方法,包括:
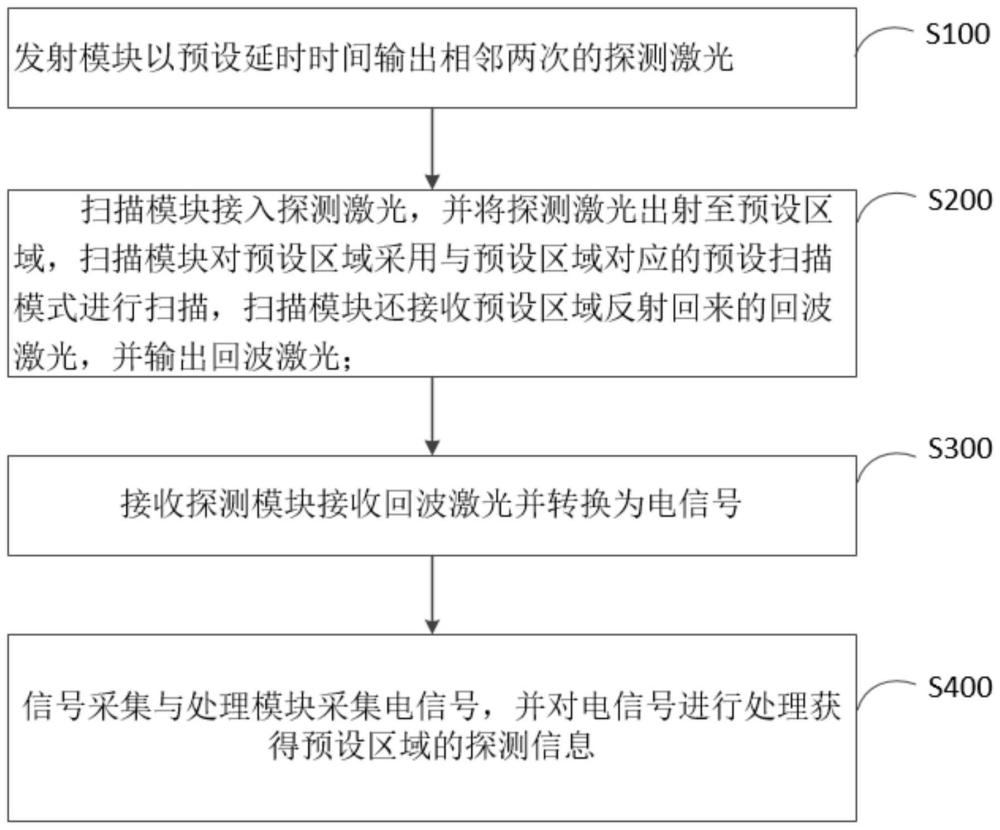
3、发射模块以预设延时时间输出相邻两次的探测激光;
4、扫描模块接入所述探测激光,并将所述探测激光出射至预设区域,所述扫描模块对所述预设区域采用与所述预设区域对应的预设扫描模式进行扫描,所述扫描模块还接收所述预设区域反射回来的回波激光,并输出所述回波激光;
5、接收探测模块接收所述回波激光并转换为电信号;
6、信号采集与处理模块采集所述电信号,并对所述电信号进行处理获得所述预设区域的探测信息。
7、在其中一个实施例中,所述扫描模块的扫描方向包括第一扫描方向、第二扫描方向中至少一个扫描方向,所述第一扫描方向与所述第二扫描方向形成预设角度,所述预设角度小于或者等于180度;
8、所述扫描模块对所述预设区域采用与所述预设区域对应的预设扫描模式进行扫描,还包括:
9、所述扫描模块在所述第一扫描方向对所述预设区域采用与所述预设区域对应的所述预设扫描模式进行扫描;或
10、所述扫描模块在所述第二扫描方向对所述预设区域采用与所述预设区域对应的所述预设扫描模式进行扫描。
11、在其中一个实施例中,所述预设区域包括至少一个预设子区域;
12、所述发射模块以预设延时时间输出相邻两次的探测激光之前,所述探测方法包括:
13、所述激光雷达获取所述扫描模块的探测视场角对应的扫描区域;
14、所述激光雷达获取所述扫描区域所处的所述预设子区域;
15、所述激光雷达获取所述预设子区域对应的扫描密度;
16、所述激光雷达基于所述扫描密度控制所述发射模块以所述扫描密度对应的预设延时时间输出探测激光。
17、在其中一个实施例中,所述扫描模块对所述预设区域采用与预设区域对应的预设扫描模式进行扫描,包括:
18、所述扫描模块获取所述扫描密度对应的预设扫描模式;
19、所述扫描模块采用所述预设扫描模式对所述预设子区域进行扫描。
20、在其中一个实施例中,所述预设扫描模式为采用所述预设子区域对应的扫描组的组间间隔对所述预设子区域进行扫描,所述扫描组为所述发射模块一次发射的所述探测激光形成的n条扫描线,所述组间间隔为相邻两次发射的所述扫描组之间的组间间隔角度;
21、所述组间间隔的计算式为:
22、
23、其中,δβ为所述组间间隔;
24、δθ为所述扫描组中各扫描线之间的间隔角度;
25、n为每个所述扫描组的扫描线数量,n为整数;
26、n为所述预设子区域对应的扫描线加密的倍数,n为实数且n≧0。
27、在其中一个实施例中,所述预设扫描模式还为采用所述预设子区域对应的扫描组的扫描速度对所述预设子区域进行扫描,并基于所述预设延时时间、组间间隔以及所述预设延时时间与所述组间间隔确定所述预设子区域对应的所述扫描速度,其中,所述扫描组为所述发射模块一次发射的所述探测激光形成的n条扫描线,n为整数,所述组间间隔为相邻两次发射的所述扫描组之间的组间间隔角度。
28、在其中一个实施例中,所述组间间隔的计算式还为:
29、
30、其中,δβ为所述组间间隔;
31、αperiod为所述第二扫描方向的一个扫描周期的所述扫描组扫描的角度;
32、αfov为所述第二扫描方向的探测视场角,且αperiod>αfov;
33、ω1为所述第一扫描方向的第一扫描速度;
34、ω2为所述第二扫描方向的第二扫描速度。
35、在其中一个实施例中,所述发射模块包括至少一个发射组;
36、所述发射模块以预设延时时间输出相邻两次的探测激光,包括:
37、所述发射模块的同一所述发射组以所述预设延时时间输出相邻两次的探测激光;或
38、所述发射模块的各所述发射组以所述预设延时时间输出相邻两次的探测激光。
39、第二方面,本技术实施例提供了一种激光雷达的探测装置,包括:
40、发射模块,用于所述发射模块以预设延时时间输出相邻两次的探测激光;
41、发射光路模块,用于接入所述探测激光并输出所述探测激光;
42、扫描模块,用于接入所述探测激光,并将所述探测激光出射至预设区域,所述扫描模块对所述预设区域采用与预设区域对应的预设扫描模式进行扫描,所述扫描模块还接收所述预设区域反射回来的回波激光,并输出所述回波激光;
43、接收探测模块,用于接收所述回波激光并转换为电信号;
44、信号采集与处理模块,用于采集所述电信号,并对所述电信号进行处理获得所述预设区域的探测信息。
45、在其中一个实施例中,所述发射光路模块包括同轴的第一透镜、第二透镜和第三透镜;
46、所述第一透镜接入所述发射模块输出的所述探测激光,并将所述探测激光中水平发光方向的探测激光转换为平行光;
47、所述第二透镜接入所述平行光,并将所述平行光传输至所述第三透镜,所述第二透镜还将所述探测激光中垂直发光方向的探测激光继续折射至所述第三透镜;
48、所述第三透镜接入所述平行光并传输至所述扫描模块,所述第三透镜还将所述探测激光中垂直发光方向的探测激光转换为准直激光并传输至所述扫描模块;
49、其中,所述第二透镜和所述第三透镜形成长焦光路;
50、所述长焦光路的等效焦距大于或者等于50mm。
51、可以理解的是,上述第二方面有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
52、本技术实施例与现有技术相比存在的有益效果是:
53、本技术的实施例提供了一种激光雷达的探测方法及探测装置,通过发射模块以预设延时时间输出相邻两次的探测激光,根据不同应用场景对预设区域采用与预设区域对应的预设扫描模式进行扫描,扫描模块还接收预设区域反射回来的回波激光,并输出回波激光,接收探测模块接收回波激光并转换为电信号,信号采集与处理模块采集电信号,并对电信号进行处理获得预设区域的探测信息,以获得预设区域的高密度的扫描点云,获得更多的点云探测信息,从而提高了激光雷达对于预设区域的扫描分辨能力,提升了激光雷达对于不同预设区域的扫描灵活性,进而提升了激光雷达在不同应用场景的探测能力。
- 还没有人留言评论。精彩留言会获得点赞!