一种应用于提升车载毫米波雷达测角精度的系统及方法与流程
1.本发明属于车载雷达技术领域,具体涉及一种应用于提升车载毫米波雷达测角精度的系统及方法。
背景技术:
2.毫米波雷达是adas中的关键传感器之一,毫米波雷达的主要作用是感知周围障碍物并提供障碍物的距离、角度、多普勒速度等信息,其中对于一般的3d毫米波雷达,角度信息主要指方位角信息,对于4d毫米波雷达则同时包含方位角和俯仰角信息。
3.因此,输出的障碍物(目标)的距离、角度、多普勒速度参数的精度,是衡量毫米波雷达性能好坏的关键。
4.而其中测量角度一般是利用相位差法,如附图1所示:
5.图中,假设雷达有一个发射天线(发射天线未在图中体现)和两个接收天线(实际为了提升测角精度和分辨率,会使用超过两个的接收天线,也可能会使用超过一个的发射天线形成mimo,增加虚拟的接收天线数目),发射天线发出的电磁波经目标反射到达接收天线,通常考虑远场情况,即当目标相对于天线间距d足够大时,不同接收天线接收到的电磁波近似平行。这样,则有如下关系:
[0006][0007]
其中,是两个接收天线收到信号的相位差,可通常后续的信号处理计算得到,λ为电磁波的波长,是已知的。而d是已知的设计值。这样,可求出目标的角度:
[0008][0009]
上述原理假设的前提是:天线阵列的排布与所测量目标在同一平面,而毫米波雷达在实际使用过程中,难免会遇到地面不平或车子有倾斜的情况,如附图2所示,对应雷达的状态如附图3所示。这种情况下,所测的目标角度平面下的天线间距d’与设计值d是不一致的,而是呈一个投影关系:d'=dcosα。其中α是倾斜角度。当α=0时,即不倾斜,d'=d,直接使用设计值d不会有误差,当α≠0时,直接使用设计值d则会产生误差。
[0010]
为此,我们提出一种应用于提升车载毫米波雷达测角精度的系统及方法来解决上述存在的问题。
技术实现要素:
[0011]
本发明的目的在于提供一种应用于提升车载毫米波雷达测角精度的系统及方法,以解决上述背景技术中提出的问题。
[0012]
为实现上述目的,根据本发明的一个方面,本发明提供一种应用于提升车载毫米波雷达测角精度的系统,该系统包括车载毫米波雷达、陀螺仪传感器和信号处理器;
[0013]
车载毫米波雷达,操作于感知车辆周围的目标障碍物,并提供目标障碍物的距离、
角度和多普勒速度信息;
[0014]
其中,该车载毫米波雷达具有一个发射天线和两个接收天线,两个接收天线之间的间距为d;
[0015]
陀螺仪传感器,操作于获取车辆在前进方向上车载毫米波雷达当前的倾斜角度α;
[0016]
信号处理器,与陀螺仪传感器和车载毫米波雷达相连接,操作于接受车载毫米波雷达的感知信息,以及车载毫米波雷达当前的倾斜角度α,以此计算出车载毫米波雷达的两个接收天线之间的投影间距d’,进而获得目标障碍物的角度θ;
[0017]
d'=dcosα
ꢀꢀꢀꢀ
(1)
[0018][0019]
式中,是两个接收天线收到信号的相位差,通过后续的信号处理计算得到,是已知的电磁波波长,而d是已知的两个接收天线间距设计值,θ为计算获得目标障碍物的角度。
[0020]
优选地,当车辆在平稳道路上平稳行驶时,陀螺仪传感器获取车辆上车载毫米波雷达当前的倾斜角度α=0。
[0021]
优选地,所述倾斜角度α的取值为陀螺仪传感器在车辆前进方向的转动的角速度,并通过对时间进行积分处理获得。
[0022]
本发明的另一方面,本发明提出一种应用于提升车载毫米波雷达测角精度的方法,具体包括以下步骤:
[0023]
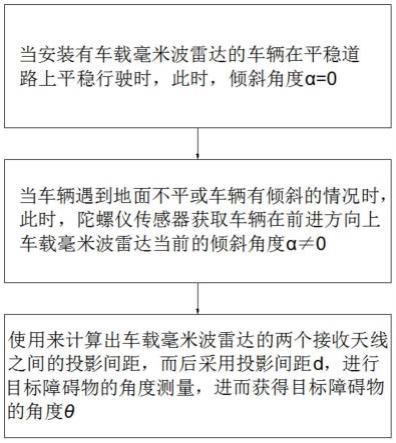
1)当安装有车载毫米波雷达的车辆在平稳道路上平稳行驶时,此时,倾斜角度α=0;
[0024]
2)当车辆遇到地面不平或车辆有倾斜的情况时,此时,陀螺仪传感器获取车辆在前进方向上车载毫米波雷达当前的倾斜角度α≠0;
[0025]
3)使用d'=dcosα来计算出车载毫米波雷达的两个接收天线之间的投影间距,而后采用投影间距d’进行目标障碍物的角度测量,进而获得目标障碍物的角度θ。
[0026]
与现有技术相比,本发明的有益效果是:
[0027]
本发明,通过采用陀螺仪传感器配合车载毫米波雷达进行车辆前进方向的目标障碍物测量,可以在车辆进行倾斜行驶时,提高车辆上安装的车载毫米波雷达的测角精度。
附图说明
[0028]
图1为车载毫米波雷达的相位差测角原理示意图;
[0029]
图2为正常行驶的车(左)和倾斜状态下的车(右)的偏转示意图;
[0030]
图3为正常行驶的车(左)的和倾斜状态下的车(右)的车载毫米波雷达偏转示意图;
[0031]
图4为一种应用于提升车载毫米波雷达测角精度的方法的流程示意图。
具体实施方式
[0032]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0033]
本发明的车载毫米波雷达有一个发射天线和两个接收天线(实际为了提升测角精度和分辨率,会使用超过两个的接收天线,也可能会使用超过一个的发射天线形成mimo,增加虚拟的接收天线数目),发射天线发出的电磁波经目标反射到达接收天线,通常考虑远场情况,即当目标相对于天线间距d足够大时,不同接收天线接收到的电磁波近似平行。这样,则有如下关系:
[0034][0035]
其中,是两个接收天线收到信号的相位差,可通常后续的信号处理计算得到,λ是已知的电磁波的波长,而d是已知的两个接收天线间距设计值。
[0036]
作为本发明的一个实施例,参阅图1-3,本发明提供一种应用于提升车载毫米波雷达测角精度的系统,可以在车辆进行倾斜行驶时,提高车辆上安装的车载毫米波雷达的测角精度,该系统包括车载毫米波雷达、陀螺仪传感器和信号处理器;
[0037]
车载毫米波雷达,操作于感知车辆周围的目标障碍物,并提供目标障碍物的距离、角度和多普勒速度信息;
[0038]
其中,该车载毫米波雷达具有一个发射天线和两个接收天线,两个接收天线之间的间距为d;
[0039]
陀螺仪传感器,操作于获取车辆在前进方向上车载毫米波雷达当前的倾斜角度α;
[0040]
信号处理器,与陀螺仪传感器和车载毫米波雷达相连接,操作于接受车载毫米波雷达的感知信息,以及车载毫米波雷达当前的倾斜角度α,以此计算出车载毫米波雷达的两个接收天线之间的投影间距d’,进而获得目标障碍物的角度θ;
[0041]
d'=dcosα
ꢀꢀꢀꢀ
(1)
[0042][0043]
式中,是两个接收天线收到信号的相位差,通过后续的信号处理计算得到,是已知的电磁波波长,而d是已知的两个接收天线间距设计值,θ为计算获得目标障碍物的角度。
[0044]
在本实施例中,当车辆在平稳道路上平稳行驶时,陀螺仪传感器获取车辆上车载毫米波雷达当前的倾斜角度α=0。
[0045]
在本实施例中,所述倾斜角度α的取值为陀螺仪传感器在车辆前进方向的转动的角速度,并通过对时间进行积分处理获得。
[0046]
需要说明的是,本发明的应用于提升车载毫米波雷达测角精度的系统中,也可采用imu来替代陀螺仪传感器,因imu内部包含陀螺仪模块,从而实现在车辆进行倾斜行驶时,获取车辆和车载毫米波雷达的倾斜角度α,并使用d'=dcosα来计算出车载毫米波雷达的两个接收天线之间的投影间距,而后采用投影间距d’进行目标障碍物的角度测量,进而获得目标障碍物的角度θ,最终提高车辆上安装的车载毫米波雷达的测角精度。
[0047]
作为本发明的另一个实施例,参阅图4,本发明提供一种应用于提升车载毫米波雷达测角精度的方法,具体包括以下步骤:
[0048]
1)当安装有车载毫米波雷达的车辆在平稳道路上平稳行驶时,此时,倾斜角度α=0;
[0049]
2)当车辆遇到地面不平或车辆有倾斜的情况时,此时,陀螺仪传感器获取车辆在
前进方向上车载毫米波雷达当前的倾斜角度α≠0;
[0050]
3)使用d'=dcosα来计算出车载毫米波雷达的两个接收天线之间的投影间距,而后采用投影间距d’进行目标障碍物的角度测量,进而获得目标障碍物的角度θ。
[0051]
具体来说,使用信号处理器来接受陀螺仪传感器获取的车辆在前进方向上车载毫米波雷达当前的倾斜角度α,并通过d'=dcosα来计算获得车载毫米波雷达的两个接收天线之间的投影间距d’,进而提高车辆上安装的车载毫米波雷达对目标障碍物的测角精度。
[0052]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0053]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1