基于时序控制的无人机机载桥梁挠度变化测量装置及方法
1.本发明涉及桥梁检测设备技术领域,具体涉及一种基于时序控制的无人机机载桥梁挠度变化测量装置及方法。
背景技术:
2.桥梁是交通系统的重要组成部分,现代化大型桥梁是交通主干道的重要节点,对交通运输具有重大影响。随着桥梁服役年限的增加,桥梁结构因自身材料的老化以及长期外部荷载作用下,导致结构承载力下降,桥梁的挠度变形是评价桥梁运营安全性评价的重要指标,桥梁的挠度检测必须定期进行。传统的人工测量方法多采用百分表或水准仪,依靠检测人员进行接触式测量,工作量大,作业效率低且具有局限性。无接触式的桥梁挠度测量是为了解决接触式测量所存在的缺陷而被提出的,通过在桥梁梁底布设反射标靶,利用激光测距仪、摄像头等采集设备,实现远距离的无接触桥梁挠度测量。但这一类的无接触式桥梁挠度测量方法,仍存在一系列实际工程中无法解决的弊端,如反射标靶蒙尘、脱落,摄像头、激光测距仪长期安装在室外环境容易受损等现实问题,针对桥下净空较大的跨河桥、跨谷桥测量设备无法安设、位姿受限,反射标靶难以维护,对城市交通中立体交叉的跨线桥、高架桥存在视线遮挡等,总体来说依赖于在地面架设观测设备的无接触式桥梁挠度测量方法仍存在很大的局限性。
3.使用无人机作为设备平台进行各类结构进行检测,是目前结构检测领域的前沿技术,基于无人机平台的桥梁挠度变化测量方法,目前主要可分为两类,一类是沿袭接触式挠度测量思路,使用无人机代替检测人员,携带测量设备,将其运载至设备观测点位,利用电磁铁、吸盘等手段,使无人机固定于观测点位,检测人员远程遥控测量设备对桥梁挠度进行测量,该方法存在如下技术难题,采用磁力吸附的固定方式受限于钢结构桥梁形式,且强磁条件下,无人机设备的定位与操控均会受到干扰,吸盘固定式无人机由于需携带多个吸盘设备与主动真空发生装置,对无人机设备的承载能力提出较高要求,因此此类检测所使用的无人机设备体型较大,操控难度高,不便于工程普及应用。另一类则是采用激光雷达、影像点云等技术手段,针对梁底进行三维成像建模,进一步获取挠度变形信息以完成测量,该类技术手段具有设备轻便、准确性高、易于操作等特点,但所搭载的激光雷达、高清相机等设备成本高昂,且所采集的点云数据、数字影像需要具有相当数据处理能力的硬件设备和具备相关专业知识的检测人员,才能够有效提取出目标测量数据,同样不具有工程普遍适用性。
4.综上所述,现今基于无人机平台的桥梁挠度变化测量方法作为结构检测领域的前沿技术,虽然能克服传统接触式和无接触式测量方法中的局限性,但仍存在着对操作人员、无人机平台等条件要求较高,或是需要专业的数据处理手段,无法满足实际工程检测人员对自动化处理数据,提供测量结果的需求。
技术实现要素:
5.本发明提供一种基于时序控制的无人机机载桥梁挠度变化测量装置及方法,用以解决目前基于无人机平台的桥梁挠度变化测量方法所存在的局限性的技术性问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种基于时序控制的无人机机载桥梁挠度变化测量装置,其包括:
8.安装支架、控制及数据处理模块、测量模块、供电及数据传输模块;所述安装支架用于将该装置安装至无人机设备顶面,并提供减震稳定功能,所述安装支架上部安装有控制及数据处理模块,用于控制测量模块进行数据采集并对所采集的数据储存并分析处理,所述的测量模块安装于控制及数据处理模块上部,且与控制及数据处理模块卡扣连接,用于对测量挠度变化所需的数据进行测量采集,所述供电及数据传输模块安装于控制及数据处理模块的下部,用于采用无人机设备机身给本装置供电,并负责本装置与无人机设备间的数据传输与指令交互。
9.作为本发明再进一步的方案:所述的安装支架包括下部支架、球形减震器和上部支架,所述下部支架边条上开有连接槽,可使用螺丝连接安装固定至无人机顶面,支架四角开有圆孔,以安装球形减震器;球形减震器为硅胶材质,中段球体两端有便于安装至下部支架与支架顶板开孔的凹槽;上部与下部支架通过球形减震器连接,以降低无人机设备平台震动对装置测量造成的影响,上部支架边条上开有连接槽,降低支架重量的同时为控制及数据处理模块安装提供卡槽,同样四角开有供球形减震器安装的圆孔。
10.作为本发明再进一步的方案:所述的控制及数据处理模块包括安装板、单片机,所述的安装板为单片机、部分测量模块和供电模块提供安装平台;所述的单片机通过螺丝固定于安装板上部,由供电及数据传输模块供电并接受来自无人机设备的测量指令,单片机接受测量指令,并发送具有时间序列的控制指令至激光测距传感器组,使激光测距传感器组中各传感器依照控制指令所分配的测量序号进行独立的测量,同时发送高度测量指令至测量模块,接受测量模块各项测量结果,计算挠度变化,储存上述数据至装置并传递给无人机机身备份。
11.作为本发明再进一步的方案:所述的测量模块包括激光测距传感器组、大气压强传感器,所述的激光测距传感器组为三个沿装置长度方向,间距相同并列排列的激光测距传感器,沿顺桥长方向对梁底任意位置,由单片机控制进行依照所被分配的测量时序,每个激光测距传感器测距一次,进行三次独立激光测距;大气压强传感器安装于控制及数据处理模块中安装板的尾部,接受单片机的控制,通过大气压强变化测量此处飞行高度。
12.作为本发明再进一步的方案:所述的供电及传输模块包括type-c接口端、供电及传输线材和提供给单片机的usb接口端,所述的type-c接口端用于与所搭载模块的无人机平台连接以进行对装置的供电和测量数据传输;所述的供电及传输线材用于两个端口间供电及传输数据;所述的提供给单片机的usb接口端安装于控制及数据处理模块中安装板底面,通过该端口连接单片机进行装置与无人机之间的指令交互与数据传输工作,并通过该端口为控制及数据处理模块和测量模块进行设备供电。
13.本发明还提供了一种基于时序控制的无人机机载桥梁挠度变化测量方法,包括以下步骤:
14.步骤s1:无人机搭载本测量装置至待检测桥梁段底;
15.使用本测量装置的安装支架,安装设备至无人机平台顶面,使用供电及数据传输模块连接无人机与本测量装置,启动装置,检测人员遥控无人机,飞行至待检测桥梁段底,使设备长度方向与该桥梁段顺桥向方向一致。
16.步骤s2:时序控制传感器测量顺序,测量所需数据;
17.遥控设备发送测量指令至无人机,无人机通过供电及数据传输模块传递测量指令至控制及数据处理模块,单片机接受指令,控制测量模块中大气压强传感器测量飞行高度h
测
;单片机发送具有时间序列的控制指令至激光测距传感器组,传感器组接受时序控制测量指令,控制组内独立的激光测距传感器,每个激光测距传感器测距一次,进行三次独立激光测距,测量数据为m1、m2、m3。
18.步骤s3:计算梁底曲线参数;
19.单片机通过接收测量模块所传递回的测量结果,计算梁底曲线参数,具体梁底曲线参数测量方法为:
20.步骤s301,因非变截面桥梁底曲线为直线,变截面桥梁底曲线按照规范为二次曲线,拱桥拱轴曲线以二次曲线为主,且均以顺桥向挠度变化为主,梁底曲线关于跨中横桥平面对称;沿横桥向,投影梁底曲线至二维平面,以跨中垂直方向为y轴,顺桥向为x轴,建立跨中平面直角坐标系c
中
;以传感器组中位激光测距传感器的接收端中点为坐标原点,垂直方向为y轴,顺桥长方向为x轴建立测量平面直角坐标系c
测
,跨中平面直角坐标系c
中
与测量平面直角坐标系c
测
坐标正负向一致。
21.步骤s302,根据测量结果,可得梁底被测三点于测量平面直角坐标系c
测
下坐标,p1(-d1,m1),p2(0,m2),p3(d2,m3)。
22.其中,p1、p2、p3为三个梁底被测点,d1、d2为测量平面直角坐标系c
测
中p1、p3点横坐标值绝对值,因传感器组中传感器排列间距相同,故d1、d2满足下列关系|d1|=|d2|=d,d为传感器组中排列间距,为定值。
23.步骤s303,设测量平面直角坐标系c
测
下,梁底曲线方程通式为:
24.y
测
=ax2+bx+c
25.步骤s304,带入p1、p2、p3为三个梁底被测点,构建求解方程通式参数a、b、c的矩阵方程为:
[0026][0027]
解之得:
[0028][0029][0030]
c=m2[0031]
步骤s305,整理测量平面直角坐标系c
测
下梁底曲线方程为:
[0032]y测
=a(x-b)2+h
测
[0033]
其中,a为梁底曲线开口尺寸,b为测量平面直角坐标系c
测
相对于跨中平面直角坐标系c
中
的横坐标偏移量,h
测
为桥梁底面至激光测距传感器接受端水平面最大竖直距离,计
算公式为:
[0034][0035]
步骤s306,偏移b获得跨中平面直角坐标系c
中
下梁底曲线方程为:
[0036]y中
=ax2+h
测
[0037]
步骤s4,遥控无人机保持飞行高度进行任意平移,重复步骤s2、s3,根据公式,校正跨中平面直角坐标系c
中
下梁底曲线方程,所采用的公式为:
[0038][0039]
其中,an为第n次测量所获得的梁底曲线开口尺寸参数,h
测n
为第n次测量所获得的桥梁底面至激光测距传感器接受端水平面最大竖直距离。
[0040]
步骤s5,存储记录本次测量结果,包括:
[0041]
步骤s501,存储记录跨中平面直角坐标系c
中
下梁底曲线方程。
[0042]
步骤s502,存储记录桥梁底面至激光测距传感器接受端水平面最大竖直距离h
测
。
[0043]
步骤s6,桥梁正常运营承受荷载或进行车辆加载试验。
[0044]
步骤s7,重复步骤s1至s5,获取桥梁承载后测量结果,根据公式计算桥梁挠度变化方程,所采用的计算公式为:
[0045]d挠
=y
中-y
′
中
+h
测-h
′
测
[0046]
其中,d
挠
为桥梁挠度变化方程,y
中
为承载后跨中平面直角坐标系c
中
下梁底曲线方程,y
′
中
为承载前跨中平面直角坐标系c
中
下梁底曲线方程,h
测
为承载后测量飞行高度,h
′
测
为承载前测量飞行高度。
[0047]
且可以直接为检测人员显示挠度变化最大值,所采用的计算公式为:
[0048]d挠max
=h
测-h
′
测
+h
测-h
′
测
[0049]
其中,d
挠max
为挠度变化最大值,h
测
为承载后桥梁底面至激光测距传感器接受端水平面最大竖直距离,h
′
测
为承载前桥梁底面至激光测距传感器接受端水平面最大竖直距离。
[0050]
步骤s8,储存记录桥梁挠度变化测量结果至装置机身储存,传输挠度变化测量结果至无人机机身,通过无线信号传输至检测人员遥控器上,显示挠度变化测量信息,包括:
[0051]
步骤s801,储存记录桥梁挠度变化方程d
挠
。
[0052]
步骤s802,储存记录挠度变化最大值d
挠max
。
[0053]
步骤s803,传输挠度变化测量结果至无人机机身,通过无线信号传输至检测人员遥控器,通过图层窗口可视化桥梁挠度变化方程d
挠
曲线,标注挠度变化最大值d
挠max
。
[0054]
本发明的有益效果在于:该基于时序控制的无人机机载桥梁挠度变化测量装置及方法设计合理,采用单片机发送具有时间序列的控制指令至激光测距传感器组,传感器组接受时序控制测量指令,控制组内独立的激光测距传感器,每个激光测距传感器测距一次,对梁底进行三次独立激光测距对梁底,运用单片机进行严密的几何运算和参数校正,远程测量桥梁结构挠度变化,解决了传统测量方法与目前已有的无人机设备在进行桥梁挠度变化测量中所存在的局限性问题,能够搭载于目前市场上大多数行业级无人机,无需对无人机本体进行改造,操作人员通过遥控装置对无人机本体和该测量装置进行控制,操作方便,数据处理迅速,无需专业数据处理能力,装置自身处理完毕,实现端对端测量,解决了由于
环境、场地等因素限制问题,且无需提前在梁底布设反射标靶,节约了人力物力。
附图说明
[0055]
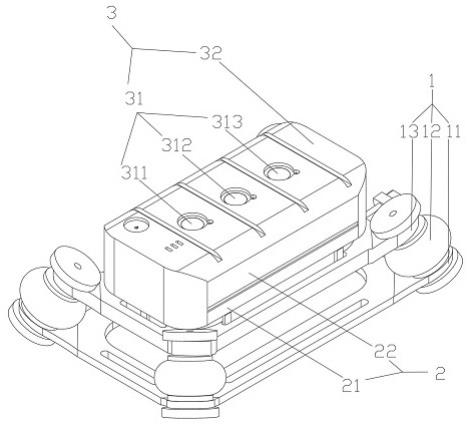
图1所示为本发明装置的立体结构示意图;
[0056]
图2所示为本发明装置的底部结构示意图;
[0057]
图3所示本发明测量方法梁底曲线计算原理示意图;
[0058]
图4所示为本发明测量方法测量坐标示意图;
[0059]
图5所示为本发明测量方法步骤流程图。
[0060]
图1~2中:1、安装支架;11、下部支架;12、球型减震器;13、上部支架;2、控制及数据处理模块;21、安装板;22、单片机;3、测距模块;31、激光测距传感器组;311、1号激光测距传感器;312、2号激光测距传感器;313、3号激光测距传感器;32、大气压强传感器;4、供电及传输模块;41、type-c接口端;42、供电及传输线材;43、单片机的usb接口端。
具体实施方式
[0061]
下面将结合附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。通常在此附图中所描述和表示的本发明实施例的各组件可以以不同的配置来布置和设计。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得所有实施例,都适用于本发明的保护。
[0062]
请参阅图1~2,一种基于时序控制的无人机机载桥梁挠度变化测量装置,其包括:安装支架1、控制及数据处理模块2、测量模块3、供电及数据传输模块4;所述安装支架1用于将该装置安装至无人机设备顶面,并提供减震稳定功能,所述安装支架1上部安装有控制及数据处理模块2,用于控制测量模块进行数据采集并对所采集的数据储存并分析处理,所述的测量模块3安装于控制及数据处理模块2上部,且与控制及数据处理模块2卡扣连接,用于对测量挠度变化所需的数据进行测量采集,所述供电及数据传输模块4安装于控制及数据处理模块2的下部,用于采用无人机设备机身给本装置供电,并负责本装置与无人机设备间的数据传输与指令交互。
[0063]
在本发明实施例中,所述的安装支架1包括下部支架11、球形减震器12和上部支架13,所述下部支架11边条上开有连接槽,可使用螺丝连接安装固定至无人机顶面,支架四角开有圆孔,以安装球形减震器12;球形减震器12为硅胶材质,中段球体两端有便于安装至下部支架与支架顶板开孔的凹槽;上部支架13与下部支架11通过球形减震器连接,以降低无人机设备平台震动对装置测量造成的影响,上部支架13边条上开有连接槽,降低支架重量的同时为控制及数据处理模块2安装提供卡槽,同样四角开有供球形减震器12安装的圆孔。
[0064]
在本发明实施例中,所述的控制及数据处理模块2包括安装板21、单片机22,所述的安装板21为单片机22、部分测量模块32和供电模块4提供安装平台;所述的单片机22通过螺丝固定于安装板21上部,由供电及数据传输模块4供电并接受来自无人机设备的测量指令,单片机22接受测量指令,并发送具有时间序列的控制指令至激光测距传感器组31,使激光测距传感器组中各传感器311、312、313依照控制指令所分配的测量序号进行独立的测量,同时发送高度测量指令至测量模块3,接受测量模块3各项测量结果,计算挠度变化,储
存上述数据至装置并传递给无人机机身备份。
[0065]
在本发明实施例中,所述的测量模块3包括激光测距传感器组31、大气压强传感器32,所述的激光测距传感器组31为三个沿装置长度方向,间距相同并列排列的激光测距传感器311、312、313,沿顺桥长方向对梁底任意位置,由单片机22控制进行依照所被分配的测量时序,每个激光测距传感器测距一次,进行三次独立激光测距;大气压强传感器32安装于控制及数据处理模块2中安装板21的尾部,接受单片机22的控制,通过大气压强变化测量此处飞行高度。
[0066]
在本发明实施例中,所述的供电及传输模块4包括type-c接口端41、供电及传输线材42和提供给单片机的usb接口端43,所述的type-c接口端41用于与所搭载装置的无人机平台连接以进行对装置的供电和测量数据传输;所述的供电及传输线材42用于两个端口间供电及传输数据;所述的提供给单片机的usb接口端42安装于控制及数据处理模块2中安装板21底面,通过该端口连接单片机22进行装置与无人机之间的指令交互与数据传输工作,并通过该端口为控制及数据处理模块2和测量模块3进行设备供电。
[0067]
请参阅图3~5本发明还提供了一种无人机平台的角度控制桥梁挠度变化测量方法,包括以下步骤:
[0068]
步骤s1:无人机搭载本测量装置至待检测桥梁段底;
[0069]
使用本测量装置的安装支架,安装设备至无人机平台顶面,使用供电及数据传输模块连接无人机与本测量装置,启动装置,检测人员遥控无人机,飞行至待检测桥梁段底,使设备长度方向与该桥梁段顺桥向方向一致。
[0070]
步骤s2:时序控制传感器测量顺序,测量所需数据;
[0071]
遥控设备发送测量指令至无人机,无人机通过供电及数据传输模块传递测量指令至控制及数据处理模块,单片机接受指令,控制测量模块中大气压强传感器测量飞行高度h
测
;单片机发送具有时间序列的控制指令至激光测距传感器组,传感器组接受时序控制测量指令,控制组内独立的激光测距传感器,每个激光测距传感器测距一次,进行三次独立激光测距,测量数据为m1、m2、m3。
[0072]
步骤s3:计算梁底曲线参数;
[0073]
单片机通过接收测量模块所传递回的测量结果,计算梁底曲线参数,具体梁底曲线参数测量方法为:
[0074]
步骤s301,因非变截面桥梁底曲线为直线,变截面桥梁底曲线按照规范为二次曲线,拱桥拱轴曲线以二次曲线为主,且均以顺桥向挠度变化为主,梁底曲线关于跨中横桥平面对称;沿横桥向,投影梁底曲线至二维平面,以跨中垂直方向为y轴,顺桥向为x轴,建立跨中平面直角坐标系c
中
;以传感器组中位激光测距传感器的接收端中点为坐标原点,垂直方向为y轴,顺桥长方向为x轴建立测量平面直角坐标系c
测
,跨中平面直角坐标系c
中
与测量平面直角坐标系c
测
坐标正负向一致。
[0075]
步骤s302,根据测量结果,可得梁底被测三点于测量平面直角坐标系c
测
下坐标,p1(-d1,m1),p2(0,m2),p3(d2,m3)。
[0076]
其中,p1、p2、p3为三个梁底被测点,d1、d2为测量平面直角坐标系c
测
中p1、p3点横坐标值绝对值,因传感器组中传感器排列间距相同,故d1、d2满足下列关系|d1|=|d2|=d,d为传感器组中排列间距,为定值。
[0077]
步骤s303,设测量平面直角坐标系c
测
下,梁底曲线方程通式为:
[0078]y测
=ax2+bx+c
[0079]
步骤s304,带入p1、p2、p3为三个梁底被测点,构建求解方程通式参数a、b、c的矩阵方程为:
[0080][0081]
解之得:
[0082][0083][0084]
c=m2[0085]
步骤s305,整理测量平面直角坐标系c
测
下梁底曲线方程为:
[0086]y测
=a(x-b)2+h
测
[0087]
其中,a为梁底曲线开口尺寸,b为测量平面直角坐标系c
测
相对于跨中平面直角坐标系c
中
的横坐标偏移量,h
测
为桥梁底面至激光测距传感器接受端水平面最大竖直距离,计算公式为:
[0088][0089]
步骤s306,偏移b获得跨中平面直角坐标系c
中
下梁底曲线方程为:
[0090]y中
=ax2+h
测
[0091]
步骤s4,遥控无人机保持飞行高度进行任意平移,重复步骤s2、s3,根据公式,校正跨中平面直角坐标系c
中
下梁底曲线方程,所采用的公式为:
[0092][0093]
其中,an为第n次测量所获得的梁底曲线开口尺寸参数,h
测n
为第n次测量所获得的桥梁底面至激光测距传感器接受端水平面最大竖直距离。
[0094]
步骤s5,存储记录本次测量结果,包括:
[0095]
步骤s501,存储记录跨中平面直角坐标系c
中
下梁底曲线方程。
[0096]
步骤s502,存储记录桥梁底面至激光测距传感器接受端水平面最大竖直距离h
测
。
[0097]
步骤s6,桥梁正常运营承受荷载或进行车辆加载试验。
[0098]
步骤s7,重复步骤s1至s5,获取桥梁承载后测量结果,根据公式计算桥梁挠度变化方程,所采用的计算公式为:
[0099]d挠
=y
中-y
′
中
+h
测-h
′
测
[0100]
其中,d
挠
为桥梁挠度变化方程,y
中
为承载后跨中平面直角坐标系c
中
下梁底曲线方程,y
′
中
为承载前跨中平面直角坐标系c
中
下梁底曲线方程,h
测
为承载后测量飞行高度,h
′
测
为承载前测量飞行高度。
[0101]
且可以直接为检测人员显示挠度变化最大值,所采用的计算公式为:
[0102]d挠max
=h
测-h
′
测
+h
测-h
′
测
[0103]
其中,d
挠max
为挠度变化最大值,h
测
为承载后桥梁底面至激光测距传感器接受端水平面最大竖直距离,h
′
测
为承载前桥梁底面至激光测距传感器接受端水平面最大竖直距离。
[0104]
步骤s8,储存记录桥梁挠度变化测量结果至装置机身储存,传输挠度变化测量结果至无人机机身,通过无线信号传输至检测人员遥控器上,显示挠度变化测量信息,包括:
[0105]
步骤s801,储存记录桥梁挠度变化方程d
挠
。
[0106]
步骤s802,储存记录挠度变化最大值d
挠max
。
[0107]
步骤s803,传输挠度变化测量结果至无人机机身,通过无线信号传输至检测人员遥控器,通过图层窗口可视化桥梁挠度变化方程d
挠
曲线,标注挠度变化最大值d
挠max
。
[0108]
综上所述,本发明的一种基于时序控制的无人机机载桥梁挠度变化测量装置及方法设计合理,采用单片机发送具有时间序列的控制指令至激光测距传感器组,传感器组接受时序控制测量指令,控制组内独立的激光测距传感器,每个激光测距传感器测距一次,对梁底进行三次独立激光测距对梁底,运用单片机进行严密的几何运算和参数校正,远程测量桥梁结构挠度变化,解决了传统测量方法与目前已有的无人机设备在进行桥梁挠度变化测量中所存在的局限性问题,能够搭载于目前市场上大多数行业级无人机,无需对无人机本体进行改造,操作人员通过遥控装置对无人机本体和该测量装置进行控制,操作方便,数据处理迅速,无需专业数据处理能力,装置自身处理完毕,实现端对端测量,解决了由于环境、场地等因素限制问题,且无需提前在梁底布设反射标靶,节约了人力物力。
[0109]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,直接或间接应用在相关的技术领域,均应包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1