一种便携式无线振动测试与高精度定位设备的制作方法
1.本发明涉及轨道交通技术领域,更具体的说是涉及一种便携式无线振动测试与高精度定位设备。
背景技术:
2.目前在轨道交通领域,振动测试通用的模式是前端测点位置布置振动传感器,从振动传感器引出一根数据线连接至采集设备,采集设备一般具有较多通道,可以同时接8通道或者16通道等数量的传感器,采集设备对振动传感器的信号进行解析,然后通过网线将解析后的数据传输至上位机(电脑等)通过软件对数据进行展示或者分析。而且整套系统功能单一,单通道输出的数据仅为振动加速度或者振动速度中的一种,数据传输受网线距离限制。
3.因此,如何提供一种便携式无线振动测试与高精度定位于一体的设备是本领域技术人员亟需解决的问题。
技术实现要素:
4.有鉴于此,本发明提供了一种便携式无线振动测试与高精度定位设备,可以快速布置设备进行振动测试和三维坐标测试,实现数据的无线传输,设备的远程控制。
5.为了实现上述目的,本发明采用如下技术方案:
6.一种便携式无线振动测试与高精度定位设备,包括:设备主体和固定工装,所述设备主体固定在所述固定工装上;
7.所述设备主体内设置有通讯模块、北斗定位模块、振动传感器、积分电路模块、ad转换模块、主控模块和电源模块,所述振动传感器、所述积分电路模块和所述ad转换模块依次电连接,所述通讯模块、所述北斗定位模块和所述电源模块均与所述主控模块电连接;
8.所述振动传感器用于采集振动信号;
9.所述积分电路模块用于对振动信号进行放大;
10.所述ad转换模块用于将模拟形式的振动信号转换为数字形式的振动信号;
11.所述北斗定位模块用于提供北斗天线固定位置的三维坐标;
12.所述主控模块用于获取转换为数字形式的振动信号、三维坐标以及发送控制指令;
13.所述通讯模块用于与上位机实现通讯;
14.所述电源模块用于为设备各模块提供电源。
15.优选的,还包括按键设置模块,所述按键设置模块与所述主控模块电连接,用于进行参数设置。
16.优选的,还包括液晶显示模块,所述液晶显示模块和所述主控模块电连接,用于显示获取的数据信息。
17.优选的,还包括指示灯显示模块,所述指示灯显示模块与所述主控模块电连接,用
于显示设备的工作状态。
18.优选的,所述通讯模块为5g通讯模块或4g通讯模块。
19.优选的,还包括把手,所述把手固定在所述设备主体顶部。
20.优选的,所述振动传感器设置为1个或者2个。
21.优选的,振动信号包括振动速度和振动加速度。
22.优选的,所述北斗定位模块用于提供时间信息。
23.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种便携式无线振动测试与高精度定位设备,解决了目前振动测试时传感器与采集设备分散,线缆多,现场布置时耗费人力,有线传输距离有限,设备功能单一的问题,可以快速布置设备进行振动测试和三维坐标测试,实现数据的无线传输,设备的远程控制。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
25.图1附图为本发明提供的便携式无线振动测试与高精度定位设备结构示意图。
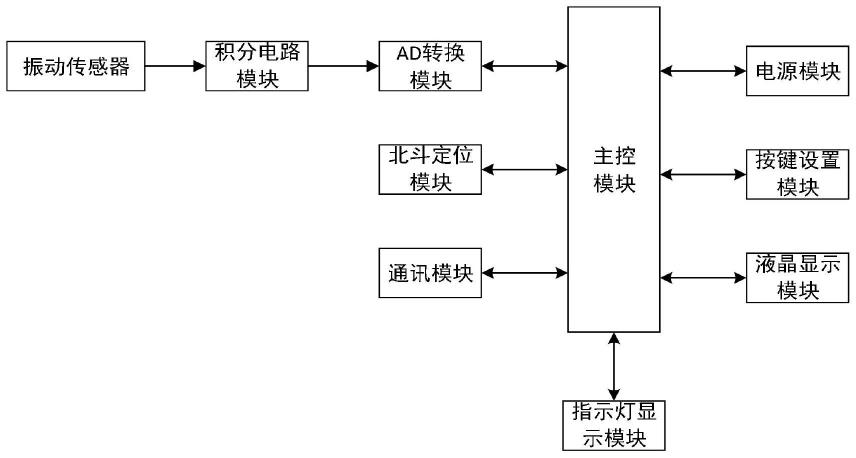
26.图2附图为本发明提供的便携式无线振动测试与高精度定位设备各模块连接框图。
27.其中,1、设备主体,2、固定工装,3、把手。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.本发明实施例公开了一种便携式无线振动测试与高精度定位设备,如图1所示,包括:设备主体1和固定工装2,设备主体1通过螺栓固定在固定工装2上;
30.如图2所示,设备主体1内设置有通讯模块、北斗定位模块、振动传感器、积分电路模块、ad转换模块、主控模块和电源模块,振动传感器、积分电路模块和ad转换模块依次电连接,通讯模块、北斗定位模块和电源模块均与主控模块电连接;振动传感器用于采集振动信号;积分电路模块用于对振动信号进行放大;ad转换模块用于将模拟形式的振动信号转换为数字形式的振动信号;北斗定位模块用于提供北斗天线固定位置的三维坐标和时间信息,北斗定位模块能够提供授时,实现多个设备采集的同步性,同时提供高精度定位;主控模块用于获取转换为数字形式的振动信号、三维坐标、时间信息以及发送控制指令;通讯模块用于与上位机实现通讯,将获取的数据发送至上位机;电源模块用于为设备各模块提供电源。
31.进一步,还包括按键设置模块,按键设置模块与主控模块电连接,用于进行参数设置。
32.进一步,还包括液晶显示模块,液晶显示模块和主控模块电连接,用于显示获取的信息。
33.进一步,还包括指示灯显示模块,指示灯显示模块与主控模块电连接,用于显示设备的工作状态。
34.进一步,通讯模块为5g通讯模块或4g通讯模块。
35.进一步,还包括把手3,把手3固定在设备主体1顶部,方便设备移动和携带。
36.进一步,振动传感器设置为1个或者2个,振动信号包括振动速度和振动加速度。
37.其中设备整体通道数为1路或2路原始信号,1路积分后信号;精度:24位∑方式;采样频率范围:1hz~16khz;动态范围:>110db;电源线与信号线集成一体,外部供电失效时可直接切换为电池供电。外部供电有效时可同时为电池充电;多台仪器级联时同步精度满足铁路检、监测需求;防水等级:不低于ip65;可实现不少于10台仪器同步采样、触发离线采样;无线信号传输互联距离不低于1km;可实现4g及5g信号快速传输、对仪器的远程控制功能。
38.进一步,积分电路模块各参数为:
39.放大倍数:5
40.积分增益:4
41.输出:2个输出,原始信号和一次积分信号
42.通频带:0.1-35hz
43.供电:12vdc
44.电流:100ma(上电瞬间),50ma(稳态工作时)
45.进一步,振动传感器各参数为:
46.灵敏度:(v
·
s2/m或v
·
s/m):2.4;
47.最大量程-速度(m/s,0-p):0.3;
48.最大量程-位移(mm,0-p):200;
49.通频带(hz:+1
ꢀ‑
3db):0.25~100;
50.输出负荷电阻(kω):1000;
51.分辨率-速度(m/s):4
×
10-7
;
52.分辨率-位移(m):4
×
10-7
;
53.进一步,北斗定位模块各参数为:
54.单机精度厘米级定位;
55.互为基站精度毫米级定位;
56.20hz数据更新率;
57.功耗低至1.0w;
58.天线接口,阻抗匹配:布线50欧姆阻抗匹配;
59.天线供电电压:外部供电+3.3v~+5v
±
5%vdc@0-100ma;
60.进一步,通讯模块为:
61.支持sa和nsa网络部署,支持5g nr/4g/3g,支持5g-r频段。5g下行速率3.5gbps、上行速率500mbps、支持lte cat.20、下行速率2.0gbps、上行速率200mbps、支持4
×
4mimo、安全芯片加密处理速率约为2mbps。
62.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
63.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1