一种三维扫描系统的制作方法
本发明涉及激光扫描,尤其涉及一种三维扫描系统。
背景技术:
1、在工业生产活动中,飞机等大型装备的表面清洗、涂装均难以实现自动化操作,其核心原因之一是缺少高精度的大空间三维扫描装备,目前,在飞机的表面上多采用激光雷达进行定点面型扫描,由于飞机的表面积很大,导致定点扫描的点云密度和点云精度差异较大,导致拟合后的面型精度较差,单纯采用激光雷达移动测量时,点云拼接依赖激光雷达的点云数据进行基础特征的拼接,存在拼接误差导致的低精度问题。
2、因此,亟需一种三维扫描系统,能够对飞机或者船舶等具有大型表面积的装备进行扫描,并保持较高的扫描精度和扫描效率。
技术实现思路
1、本发明的一个目的在于:提供一种三维扫描系统,能够对飞机或者船舶等具有大型表面积的装备进行扫描,并保持较高的扫描精度和扫描效率。
2、为达此目的,本发明采用以下技术方案:
3、一种三维扫描系统,包括:
4、激光扫描装置,所述激光扫描装置用于实现三维空间内面型的高精度扫描;
5、牵引装置,所述牵引装置包括拉绳以及驱动组件,所述拉绳的一端与所述激光扫描装置连接,所述拉绳的另一端与所述驱动组件的输出端连接,所述激光扫描装置的前进方向设置有至少一个所述牵引装置,且位于所述激光扫描装置的前进方向的所述牵引装置为前牵引装置,所述前牵引装置中的所述拉绳连接于所述激光扫描装置的前端,背离所述激光扫描装置的前进方向的一侧设置有至少一个所述牵引装置,且位于背离所述激光扫描装置的前进方向的一侧的所述牵引装置为后牵引装置,所述后牵引装置中的所述拉绳连接于所述激光扫描装置的后端;
6、激光跟踪仪,所述激光跟踪仪用于实时跟踪所述激光扫描装置的位置和姿态。
7、作为一种可选的技术方案,所述激光扫描装置包括固定板和激光雷达,所述激光雷达安装于所述固定板上,所述前牵引装置中的所述拉绳连接于所述固定板的前端,所述后牵引装置中的所述拉绳连接于所述固定板的后端。
8、作为一种可选的技术方案,所述激光雷达转动安装于所述固定板上。
9、作为一种可选的技术方案,所述牵引装置设置为四个,其中两个所述牵引装置设置为所述前牵引装置,另外两个所述牵引装置设置为所述后牵引装置,两个所述前牵引装置对称设置于所述激光扫描装置的移动路径的延长线的两侧,两个所述后牵引装置对称设置于所述激光扫描装置的移动路径的延长线的两侧。
10、作为一种可选的技术方案,所述牵引装置设置为三个,其中一个所述牵引装置设置为所述前牵引装置,另外两个所述牵引装置设置为所述后牵引装置,所述前牵引装置位于所述激光扫描装置的移动路径的延长线上,两个所述后牵引装置对称设置于所述激光扫描装置的移动路径的延长线的两侧。
11、作为一种可选的技术方案,所述拉绳采用碳纤维材料制成。
12、作为一种可选的技术方案,所述牵引装置还包括固定架,所述固定架的顶部转动设置有第一滑轮,所述驱动组件安装于所述固定架的底部,所述拉绳绕设于所述第一滑轮的外周。
13、作为一种可选的技术方案,所述固定架的底部转动设置有第二滑轮,所述第二滑轮的旋转中心线与所述第一滑轮的旋转中心线平行,所述拉绳绕设于所述第二滑轮的外周。
14、作为一种可选的技术方案,所述驱动组件包括电机以及滚筒,所述滚筒安装于所述电机的输出端,所述拉绳的一端连接于所述滚筒上。
15、作为一种可选的技术方案,所述驱动组件还包括第一支撑座、第二支撑座、滚动轴承、第一端盖以及第二端盖,所述电机安装于所述第二支撑座上,所述第一端盖安装于所述滚筒的一端,第二端盖安装于所述滚筒的另一端,所述滚动轴承安装于所述第一支撑座上,所述第一端盖与所述滚动轴承连接。
16、本发明的有益效果在于:
17、本发明提供一种三维扫描系统,该三维扫描系统包括激光扫描装置、牵引装置以及激光跟踪仪,激光扫描装置不论是移动到任何位置,都有前牵引装置和后牵引装置进行连接,激光扫描装置的移动路径得到精准控制,激光跟踪仪能够实时跟踪激光扫描装置的位置和姿态,实现全域坐标和局部坐标的转化,避免了点云拼接,从而提高三维扫描系统的扫描效率,保证得到的扫描数据的精度满足要求,当需要对具有大表面积的待测物件进行扫描时,激光跟踪仪能够对牵引装置进行位置和姿态的闭环控制,同时实现激光扫描装置的局部坐标到全局坐标的转化,提升扫描精度,前牵引装置中的驱动组件收卷拉绳的同时,后牵引装置中的驱动组件在释放拉绳,前牵引装置中的驱动组件收卷拉绳的速度等于后牵引装置中的驱动组件释放拉绳的速度,避免激光扫描装置在扫描过程中偏离于预设的扫描路径。
技术特征:
1.一种三维扫描系统,其特征在于,包括:
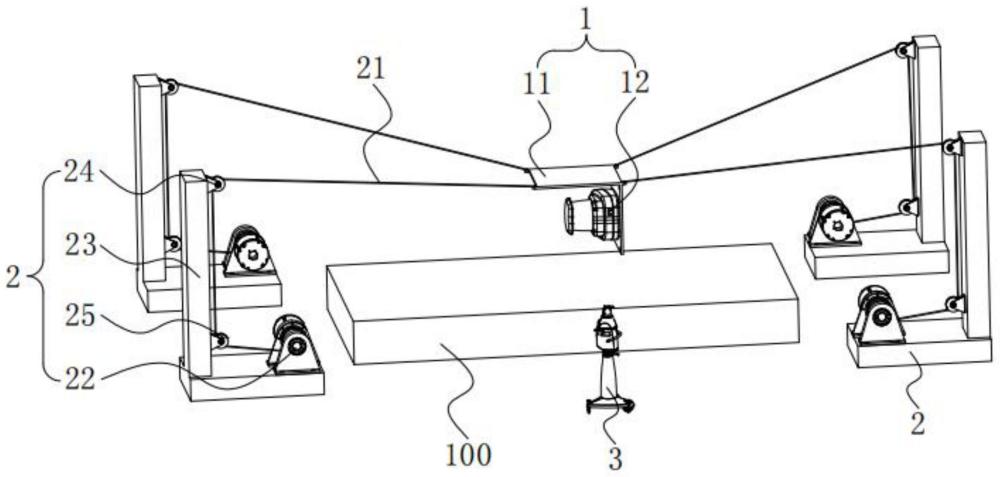
2.根据权利要求1所述的三维扫描系统,其特征在于,所述激光扫描装置(1)包括固定板(11)和激光雷达(12),所述激光雷达(12)安装于所述固定板(11)上,所述前牵引装置中的所述拉绳(21)连接于所述固定板(11)的前端,所述后牵引装置中的所述拉绳(21)连接于所述固定板(11)的后端。
3.根据权利要求2所述的三维扫描系统,其特征在于,所述激光雷达(12)转动安装于所述固定板(11)上。
4.根据权利要求1所述的三维扫描系统,其特征在于,所述牵引装置(2)设置为四个,其中两个所述牵引装置(2)设置为所述前牵引装置,另外两个所述牵引装置(2)设置为所述后牵引装置,两个所述前牵引装置对称设置于所述激光扫描装置(1)的移动路径的延长线的两侧,两个所述后牵引装置对称设置于所述激光扫描装置(1)的移动路径的延长线的两侧。
5.根据权利要求1所述的三维扫描系统,其特征在于,所述牵引装置(2)设置为三个,其中一个所述牵引装置(2)设置为所述前牵引装置,另外两个所述牵引装置(2)设置为所述后牵引装置,所述前牵引装置位于所述激光扫描装置(1)的移动路径的延长线上,两个所述后牵引装置对称设置于所述激光扫描装置(1)的移动路径的延长线的两侧。
6.根据权利要求1所述的三维扫描系统,其特征在于,所述拉绳(21)采用碳纤维材料制成。
7.根据权利要求1所述的三维扫描系统,其特征在于,所述牵引装置(2)还包括固定架(23),所述固定架(23)的顶部转动设置有第一滑轮(24),所述驱动组件(22)安装于所述固定架(23)的底部,所述拉绳(21)绕设于所述第一滑轮(24)的外周。
8.根据权利要求7所述的三维扫描系统,其特征在于,所述固定架(23)的底部转动设置有第二滑轮(25),所述第二滑轮(25)的旋转中心线与所述第一滑轮(24)的旋转中心线平行,所述拉绳(21)绕设于所述第二滑轮(25)的外周。
9.根据权利要求1所述的三维扫描系统,其特征在于,所述驱动组件(22)包括电机(221)以及滚筒(222),所述滚筒(222)安装于所述电机(221)的输出端,所述拉绳(21)的一端连接于所述滚筒(222)上。
10.根据权利要求9所述的三维扫描系统,其特征在于,所述驱动组件(22)还包括第一支撑座(223)、第二支撑座(224)、滚动轴承(225)、第一端盖(226)以及第二端盖(227),所述电机(221)安装于所述第二支撑座(224)上,所述第一端盖(226)安装于所述滚筒(222)的一端,第二端盖(227)安装于所述滚筒(222)的另一端,所述滚动轴承(225)安装于所述第一支撑座(223)上,所述第一端盖(226)与所述滚动轴承(225)连接。
技术总结
本发明属于激光扫描技术领域,公开一种三维扫描系统,该三维扫描系统包括激光扫描装置、牵引装置以及激光跟踪仪;牵引装置包括拉绳以及驱动组件,拉绳的一端与激光扫描装置连接,拉绳的另一端与驱动组件的输出端连接,激光扫描装置的前进方向设置有牵引装置,且位于激光扫描装置的前进方向的牵引装置为前牵引装置,前牵引装置中的拉绳连接于激光扫描装置的前端,背离激光扫描装置的前进方向的一侧设置有牵引装置,且位于背离激光扫描装置的前进方向的一侧的牵引装置为后牵引装置,后牵引装置中的拉绳连接于激光扫描装置的后端。本发明的三维扫描系统能够对飞机或者船舶等具有大型表面积的装备进行扫描,并保持较高的扫描精度和扫描效率。
技术研发人员:宋袁曾,冯源,吴鹏程,曹杰,贲娜,高伟庆,刘院君
受保护的技术使用者:上海飞机制造有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!