一种应用于室内机器人的测距用避障超声波反应器的制作方法
1.本发明属于超声波反应器技术领域,具体为一种应用于室内机器人的测距用避障超声波反应器。
背景技术:
2.目前机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。为了增加机器人的感知能力,通常会在机器人的眼部装有超声波反应器,而现有的应用于室内机器人的测距用避障超声波反应器在安装时不方便固定,且现有的应用于室内机器人的测距用避障超声波反应器在使用时没有线束保护的机构,容易导致连接线脱落等现象的发生,导致超声波反应器无法使用。
技术实现要素:
3.本发明的目的就在于为了解决上述问题而提供一种应用于室内机器人的测距用避障超声波反应器,解决了背景技术中提到的问题。
4.为了解决上述问题,本发明提供了一种技术方案:
5.一种应用于室内机器人的测距用避障超声波反应器,包括安装板、超声波反应器本体,所述超声波反应器本体上固定连接有连接块,所述安装板的内部滑动连接有连接块,所述超声波反应器本体上设置有垫圈,所述垫圈与安装板接触,所述安装板上设置有固定机构,所述超声波反应器本体上设置有连接线,所述安装板上开设有限位槽,所述限位槽的内部固定连接有套筒,所述套筒上设置有线束机构。
6.作为优选,所述固定机构包括滑槽、滑块、导向杆、第一弹簧、斜块、卡杆、顶块、螺纹杆,所述安装板上开设有滑槽,所述滑槽的内部滑动连接有滑块,所述滑槽的内部固定连接有导向杆,所述导向杆与滑块滑动套接,所述导向杆上设置有第一弹簧,所述滑块上固定连接有斜块,所述斜块与安装板接触,所述斜块上固定连接有卡杆,所述连接块的内部滑动连接有卡杆,两个所述斜块之间滑动连接有顶块,所述顶块与安装板接触,所述顶块的内部通过轴承连接有螺纹杆,所述安装板的内部通过螺纹连接有螺纹杆,通过固定机构的设计,可方便超声波反应器本体进行安装。
7.作为优选,所述第一弹簧的一端固定连接有滑块,所述第一弹簧的另一端固定连接有安装板,通过第一弹簧的设计,可带动斜块复位。
8.作为优选,所述斜块的数量为两个,两个所述斜块在安装板上呈对称分布,通过斜块的设计,可带动卡杆对连接块进行限位。
9.作为优选,所述线束机构包括滑杆、第二弹簧、限位块、第一限位板、第二限位板、夹块、限位环、连接杆、连接板、固定块,所述套筒的内部滑动连接有滑杆,所述滑杆的外侧
设置有第二弹簧,所述滑杆上固定连接有限位块,所述限位槽的内部滑动连接有限位块,所述安装板上接触有第一限位板和第二限位板,所述第一限位板和第二限位板上均固定连接有限位块,所述第一限位板和第二限位板上均固定连接有夹块,所述第二限位板上固定连接有限位环,所述限位环的内部滑动连接有连接杆,所述第二限位板的内部滑动连接有连接杆,所述连接杆上固定连接有连接板,所述连接板上固定连接有固定块,所述第一限位板的内部卡接有固定块,通过线束机构的设计,可对连接线起限位作用。
10.作为优选,所述第二弹簧的一端与滑杆接触,所述第二弹簧的另一端与套筒接触,通过第二弹簧的设计,可带动夹块移动。
11.作为优选,两个所述夹块相互接触,两个所述夹块之间夹持有连接线,通过夹块的设计,可对连接线进行夹持。
12.作为优选,所述连接板与第一限位板接触,所述连接板与第二限位板接触,所述连接板与限位环接触,通过连接板的设计,可方便带动固定块移动。
13.本发明的有益效果是:本发明涉及一种应用于室内机器人的测距用避障超声波反应器,具有方便在超声波反应器安装后对其固定和使超声波反应器的连接线保持稳定特点,在具体的使用中,与传统的应用于室内机器人的测距用避障超声波反应器相比较而言,本应用于室内机器人的测距用避障超声波反应器具有以下两个有益效果:
14.首先,通过设置有斜块、顶块、螺纹杆等部件,可通过转动螺纹杆,使螺纹杆带动顶块滑入两个斜块内部并与安装板接触,便可使斜块带动卡杆对超声波反应器本体上的连接块进行限位,使超声波反应器本体可以固定在安装板上,解决了现有的应用于室内机器人的测距用避障超声波反应器在安装时不方便固定的问题。
15.其次,通过设置有第二弹簧、第一限位板、第二限位板等部件,可使第二弹簧带动第一限位板和第二限位板上的夹块对连接线进行夹持,可有效的防止连接线受拖拽等力而发生脱落的现象,解决了现有的应用于室内机器人的测距用避障超声波反应器在使用时没有线束保护的机构,容易导致连接线脱落等现象的发生,导致超声波反应器无法使用的问题。
附图说明:
16.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
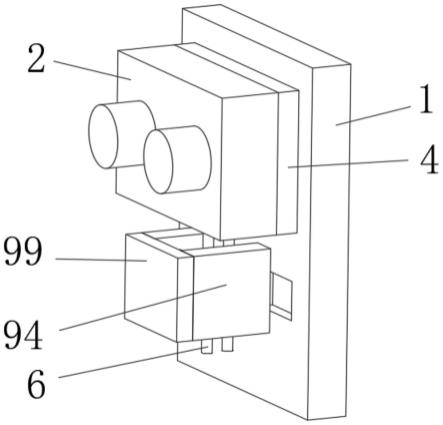
17.图1为本发明的整体结构立体图;
18.图2为本发明的图1的正视剖视图;
19.图3为本发明的图2中的a部结构放大图;
20.图4为本发明的图2中的第一限位板的仰视剖视图;
21.图5为本发明的图4中的b部结构放大图;
22.图6为本发明的图4中的连接板的后视图;
23.图中:1、安装板;2、超声波反应器本体;3、连接块;4、垫圈;5、固定机构;51、滑槽;52、滑块;53、导向杆;54、第一弹簧;55、斜块;56、卡杆;57、顶块;58、螺纹杆;6、连接线;7、限位槽;8、套筒;9、线束机构;91、滑杆;92、第二弹簧;93、限位块;94、第一限位板;95、第二限位板;96、夹块;97、限位环;98、连接杆;99、连接板;910、固定块。
具体实施方式:
24.如图1-6所示,本具体实施方式采用以下技术方案:
25.实施例:
26.一种应用于室内机器人的测距用避障超声波反应器,包括安装板1、超声波反应器本体2,所述超声波反应器本体2上固定连接有连接块3,所述安装板1的内部滑动连接有连接块3,所述超声波反应器本体2上设置有垫圈4,所述垫圈4与安装板1接触,所述安装板1上设置有固定机构5,所述超声波反应器本体2上设置有连接线6,所述安装板1上开设有限位槽7,所述限位槽7的内部固定连接有套筒8,所述套筒8上设置有线束机构9。
27.其中,所述固定机构5包括滑槽51、滑块52、导向杆53、第一弹簧54、斜块55、卡杆56、顶块57、螺纹杆58,所述安装板1上开设有滑槽51,所述滑槽51的内部滑动连接有滑块52,所述滑槽51的内部固定连接有导向杆53,所述导向杆53与滑块52滑动套接,所述导向杆53上设置有第一弹簧54,所述滑块52上固定连接有斜块55,所述斜块55与安装板1接触,所述斜块55上固定连接有卡杆56,所述连接块3的内部滑动连接有卡杆56,两个所述斜块55之间滑动连接有顶块57,所述顶块57与安装板1接触,所述顶块57的内部通过轴承连接有螺纹杆58,所述安装板1的内部通过螺纹连接有螺纹杆58,通过固定机构5的设计,可方便超声波反应器本体2进行安装。
28.其中,所述第一弹簧54的一端固定连接有滑块52,所述第一弹簧54的另一端固定连接有安装板1,通过第一弹簧54的设计,可带动斜块55复位。
29.其中,所述斜块55的数量为两个,两个所述斜块55在安装板1上呈对称分布,通过斜块55的设计,可带动卡杆56对连接块3进行限位。
30.其中,所述线束机构9包括滑杆91、第二弹簧92、限位块93、第一限位板94、第二限位板95、夹块96、限位环97、连接杆98、连接板99、固定块910,所述套筒8的内部滑动连接有滑杆91,所述滑杆91的外侧设置有第二弹簧92,所述滑杆91上固定连接有限位块93,所述限位槽7的内部滑动连接有限位块93,所述安装板1上接触有第一限位板94和第二限位板95,所述第一限位板94和第二限位板95上均固定连接有限位块93,所述第一限位板94和第二限位板95上均固定连接有夹块96,所述第二限位板95上固定连接有限位环97,所述限位环97的内部滑动连接有连接杆98,所述第二限位板95的内部滑动连接有连接杆98,所述连接杆98上固定连接有连接板99,所述连接板99上固定连接有固定块910,所述第一限位板94的内部卡接有固定块910,通过线束机构9的设计,可对连接线6起限位作用。
31.其中,所述第二弹簧92的一端与滑杆91接触,所述第二弹簧92的另一端与套筒8接触,通过第二弹簧92的设计,可带动夹块96移动。
32.其中,两个所述夹块96相互接触,两个所述夹块96之间夹持有连接线6,通过夹块96的设计,可对连接线6进行夹持。
33.其中,所述连接板99与第一限位板94接触,所述连接板99与第二限位板95接触,所述连接板99与限位环97接触,通过连接板99的设计,可方便带动固定块910移动。
34.本发明的使用状态为:使用时,通过将超声波反应器本体2上的连接块3插入安装板1内,然后通过转动螺纹杆58,使螺纹杆58与安装板1发生螺纹运动,使螺纹杆58带动顶块57移动,使顶块57带动斜块55移动,使斜块55带动滑块52对第一弹簧54进行挤压,同时斜块55带动卡杆56卡入连接块3中,可对连接块3起限位作用,便可将超声波反应器本体2固定在
安装板1上。通过使第一限位板94和第二限位板95向相反的方向移动,并使其带动限位块93在限位槽7内滑动,使限位块93带动滑杆91对第二弹簧92进行挤压,然后将超声波反应器本体2上的连接线6放入两个夹块96之间,松开第一限位板94和第二限位板95,第二弹簧92的弹力便会带动滑杆91上的限位块93移动,使两个限位块93分别带动第一限位板94和第二限位板95移动,使第一限位板94和第二限位板95带动夹块96对连接线6进行夹持,可对连接线6起限位作用,然后移动连接板99,使连接板99带动固定块910移动,使固定块910卡入第一限位板94中,可使夹块96对连接线6限位时更加稳定。
35.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1