基于对称采样的地震三维观测系统线距设计方法及系统与流程
本发明涉及地球物理勘探,尤其涉及一种基于对称采样的地震三维观测系统线距设计方法及系统,具体涉及一种适用于三维地震勘探采集观测系统的进行炮线距和检波线距计算及设计的方法、系统、计算机设备及存储介质。
背景技术:
1、在地震勘探中,地震数据资料的采集一般来源于地震检波器。“两宽一高”地震勘探技术的推广,使得全方位接收与对称采样成为了当前地震勘探的主流技术。但这种对称采样一直以一种理念的形式存在于采集设计人员的思维里,采集方案设计也一直是人为主观地设定相等炮线距与检波线距、炮点距与检波点距。在炮线距和检波线距的论证方面,虽然有一定的技术流程,但人为因素过于严重。
2、二次函数的极值特性会使观测系统线距存在最优解,在覆盖次数与最大偏移距给定的情况下,求取线距的最优解能够减少采集观测系统设计过程中的人工干预,提高地震采集观测方案的设计精度。
3、该技术是在面向地下成像点的地面有效观测范围内,根据期望的覆盖次数、最大炮检距及面元网格尺寸,利用观测系统对称采样原理,计算出地震采集三维观测系统的炮线距和接收线距,从而为均匀随机的炮检点位置设计提供标准,本技术仅可以用于野外观测系统采集设计,达到优化地震采集观测系统的目的。
技术实现思路
1、为了解决上述现有技术中存在的技术问题,本发明提供了一种基于对称采样的地震三维观测系统线距设计方法及系统,利用提供的可以适用于三维观测系统的线距计算方法,为均匀对称观测系统的炮检点位置设计提供先验条件。
2、为实现上述目的,本发明实施例提供了如下的技术方案:
3、第一方面,在本发明提供的一个实施例中,提供了一种基于对称采样的地震三维观测系统线距设计方法,该方法包括以下步骤:
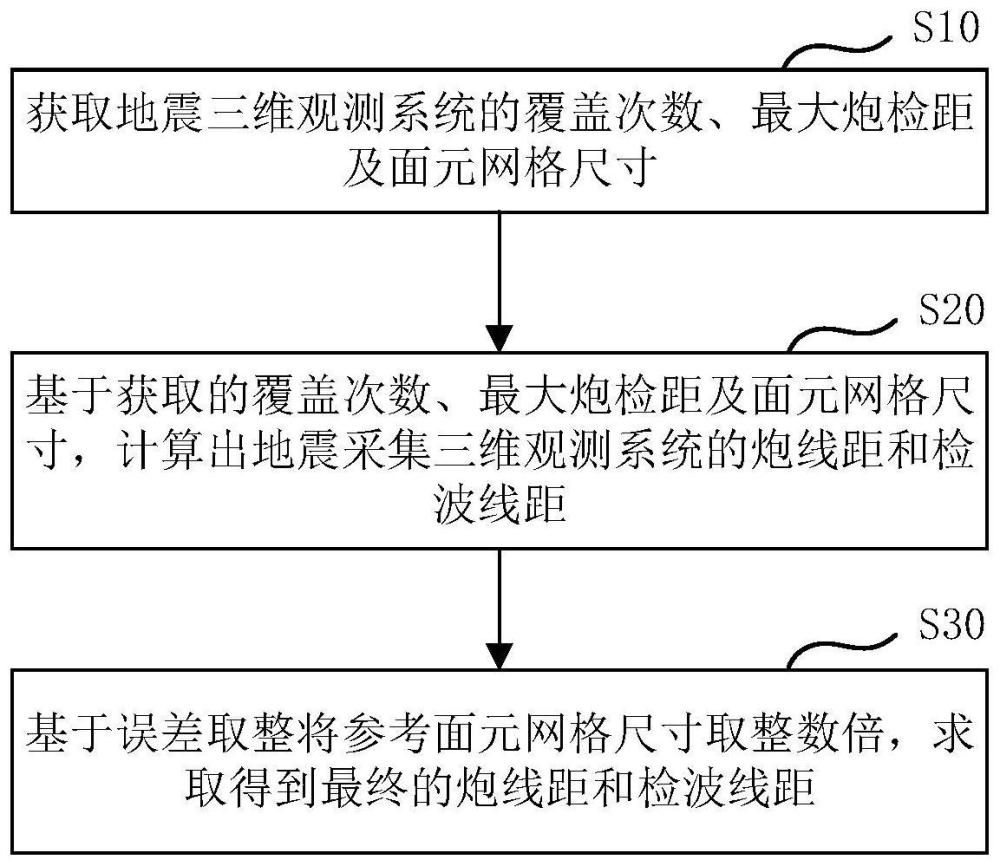
4、获取地震三维观测系统的覆盖次数、最大炮检距及面元网格尺寸;
5、基于获取的覆盖次数、最大炮检距及面元网格尺寸,计算出地震采集三维观测系统的炮线距和检波线距;
6、基于误差取整将参考面元网格尺寸取整数倍,求取得到最终的炮线距和检波线距。
7、作为本发明的进一步方案,所述地震三维观测系统的覆盖次数为预设期望的覆盖次数,并标记为f;所述最大炮检距包括inline方向的最大炮检距以及crossline方向的最大炮检距,分别标记为x和y;所述面元网格尺寸标记为dh。
8、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,根据对称采样原理,通过面元网格尺寸求出检波点距离和炮点距离;
9、其中,所述检波点距离标记为ri,ri=2*dh;
10、所述炮点距离标记为si,si=2*dh。
11、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算求出每条接收排列的接收道数;
12、所述接收道数标记为nroneline,nroneline=2*x/ri,式中:/代表除号。
13、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算求出每条接收排列的接收线数;
14、所述接收线数标记为nrlines,nrlines=4*f*a/nroneline,式中:*代表乘号;
15、其中:a=sli/ri,sli为炮线距。
16、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算求出每条接收排列的接收线距;
17、所述接收线距标记为rli,rli=2*y/(nrlines-1)。
18、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括根据对称采样原理,确定炮线距等于检波线距,即:
19、sli=rli;
20、其中,sli=2*x*y/(2*f*sli-x)。
21、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算出线距sli和rli;
22、基于炮线距等于检波线,计算出线sli=[x+sqrt(x2+16*f*x*y)]/(4*f),单位为米。
23、作为本发明的进一步方案,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括最终的线距以计算出线sli的计算结果为基准,并参考面元网格尺寸取整数倍,得:
24、sli=int(sli/dh)*dh,其中int()代表四舍五入取整。
25、第二方面,在本发明提供的又一个实施例中,提供了一种基于对称采样的地震三维观测系统线距设计系统,该系统包括:
26、参数获取模块,用于获取地震三维观测系统的覆盖次数、最大炮检距及面元网格尺寸;
27、距离计算模块,用于基于获取的覆盖次数、最大炮检距及面元网格尺寸,计算出地震采集三维观测系统的炮线距和检波线距;
28、取整设计模块,用于基于误差取整将参考面元网格尺寸取整数倍,求取得到最终的炮线距和检波线距。
29、第三方面,在本发明提供的又一个实施例中,提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器加载并执行所述计算机程序时实现基于对称采样的地震三维观测系统线距设计方法的步骤。
30、第四方面,在本发明提供的再一个实施例中,提供了一种存储介质,存储有计算机程序,所述计算机程序被处理器加载并执行时实现所述基于对称采样的地震三维观测系统线距设计方法的步骤。
31、本发明提供的技术方案,具有如下有益效果:
32、本发明提供的基于对称采样的地震三维观测系统线距设计方法及系统,可以适用于三维观测系统的线距计算方法,为均匀对称观测系统的炮检点位置设计提供先验条件。
33、本发明基于三维观测系统对称采样原理,根据已知的覆盖次数、最大炮检距及面元网格尺寸,计算出地震采集三维观测系统的炮线距和检波线距,三维观测系统的线距设计提供标准,进而保证地震勘探的成像精度,可以用于节点采集的观测系统设计以及“两宽一高”地震采集观测系统设计等。
34、本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
35、本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种基于对称采样的地震三维观测系统线距设计方法,其特征在于,该方法包括以下步骤:
2.如权利要求1所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述地震三维观测系统的覆盖次数为预设期望的覆盖次数,并标记为f;所述最大炮检距包括inline方向的最大炮检距以及crossline方向的最大炮检距,分别标记为x和y;所述面元网格尺寸标记为dh。
3.如权利要求2所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,根据对称采样原理,通过面元网格尺寸求出检波点距离和炮点距离;
4.如权利要求3所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算求出每条接收排列的接收道数;
5.如权利要求2所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算求出每条接收排列的接收线数;
6.如权利要求5所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算求出每条接收排列的接收线距;
7.如权利要求6所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括根据对称采样原理,确定炮线距等于检波线距,即:
8.如权利要求7所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括计算出线距sli和rli;
9.如权利要求8所述的基于对称采样的地震三维观测系统线距设计方法,其特征在于,所述计算出地震采集三维观测系统的炮线距和检波线距,还包括最终的线距以计算出线sli的计算结果为基准,并参考面元网格尺寸取整数倍,得:
10.一种基于对称采样的地震三维观测系统线距设计系统,其特征在于,该系统包括:
技术总结
本发明涉及地球物理勘探技术领域,具体涉及一种基于对称采样的地震三维观测系统线距设计方法及系统。该方法获取地震三维观测系统的覆盖次数、最大炮检距及面元网格尺寸,计算出地震采集三维观测系统的炮线距和检波线距;基于误差取整将参考面元网格尺寸取整数倍,求取得到最终的炮线距和检波线距。本发明可以适用于三维观测系统的线距计算方法,为均匀对称观测系统的炮检点位置设计提供先验条件。本发明基于三维观测系统对称采样原理,根据已知的覆盖次数、最大炮检距及面元网格尺寸,计算出地震采集三维观测系统的炮线距和检波线距,三维观测系统的线距设计提供标准,进而保证地震勘探的成像精度。
技术研发人员:卢秀丽,何宝庆,马兰,何永清,罗开云,吕盼盼
受保护的技术使用者:中国石油天然气集团有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!