一种基于神经网络的近海岛礁高程传递方法与流程
1.本发明属于海洋测量领域,特别涉及一种基于神经网络的近海岛礁高程传递方法。
背景技术:
2.随着国家海洋战略的提升,准确测量岛礁地形是构建“数字海洋”的基础工作之一,而海岛礁高程基准更是岛礁地形测量的基础。建立与陆地统一的海岛(礁)高程基准是当前我国海岛(礁)测绘面临的一大难题,传统的陆地高程传递方法无法直接应用于长距离跨海高程传递实践中,而已有的传递方法如跨河水准法只能适应3.5km以内的高短距离程传递[国家一二等水准测量规范gb/t 12897-2006,16]。而同步验潮法传递高程需要有长期验潮站[长江口外岛礁高程基准传递方法研究,吴敬文等,人民长江,2021,52(7),120-123]。
技术实现要素:
[0003]
本发明为解决公知技术中存在的技术问题而提供一种基于神经网络的近海岛礁高程传递方法,无需长期验潮站,且传递距离较远,传递精度较高。
[0004]
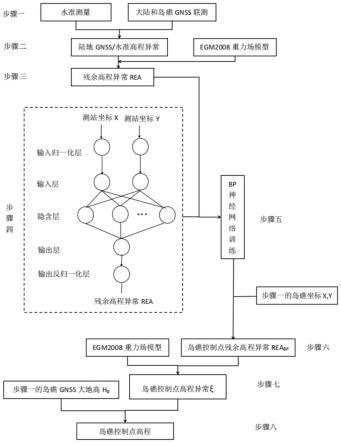
本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种基于神经网络的近海岛礁高程传递方法,采用以下步骤:
[0005]
s1:在陆地和岛礁控制点上进行gnss联测,并在陆地控制点上进行水准测量;
[0006]
s2:利用陆地上gnss大地高成果和水准高成果,获得陆地gnss/水准高程异常;
[0007]
s3:利用步骤s2的gnss/水准高程异常和相应的egm2008重力场模型高程异常,计算陆地残余高程异常,记为rea;
[0008]
s4:构建bp神经网络,利用bp神经网络建立陆地控制点北坐标x和东坐标y与残余高程异常的非线性关系;
[0009]
s5:利用步骤s1陆地控制点的北坐标x、东坐标y以及步骤s3的残余高程异常rea,对步骤s4建立的bp神经网络进行训练;
[0010]
s6:将岛礁控制点的北坐标x和东坐标y作为输入参数,代入步骤s5已经训练完成的bp神经网络模型,计算出该点的残余高程异常rea
bp
;
[0011]
s7:利用步骤s6计算岛礁控制点的残余高程异常rea
bp
补偿岛礁控制点的egm2008重力场下的高程异常ξ
egm
,获得岛礁控制点的高程异常ξ=ξ
egm
+rea
bp
;
[0012]
s8:利用步骤s1获得的岛礁控制点gnss大地高h0和步骤s7获得的高程异常,可获得岛礁控制点的水准高h=h
0-ξ=h
0-ξ
egm-rea
bp
。
[0013]
其中,h0为岛礁控制点的大地高,ξ
egm
为岛礁控制点的egm2008重力场模型下的高程异常,rea
bp
为步骤s6计算的残余高程异常。
[0014]
所述步骤s4,bp神经网络设有5层,依次为输入归一化层、输入层、隐含层、输出层、输出反归一化层。
[0015]
所述步骤s4,隐含层有5个节点。
[0016]
本发明具有的优点和积极效果是:通过选择合适的输入输出参数建立bp神经网络模型,并对其进行训练,利用训练后的bp神经网络模型预测近海岛礁残余高程异常,再结合重力场下的高程异常和大地高计算近海岛礁的水准高,水准成果精度高,测量简便,既解决了跨河水准高程方法传递距离近的难题,又解决了无长期验潮站时高程无法传递的难题,对于近海岛礁高程传递具有重要的意义。
附图说明
[0017]
图1为本发明的流程图;
[0018]
图2为收集的控制点资料示意图;
[0019]
图3为陆地控制点gnss/水准高程异常示意图;
[0020]
图4为测量区域egm2008重力场模型下1
′×1′
格网高程异常示意图;
[0021]
图5为陆地控制点残余高程异常示意图;
[0022]
图6为构建的bp神经网络示意图;
[0023]
图7为bp神经网络训练样本示意图;
[0024]
图8为bp神经网络检验样本示意图;
[0025]
图9为岛礁控制点预测高程异常示意图。
具体实施方式
[0026]
为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:
[0027]
以南方某岛礁及附近陆地为测量研究区域,该岛礁距离附近陆地有10多公里,且有一条海堤与陆地连接。采用本发明提供的一种基于神经网络的近海岛礁高程传递方法来进行该岛礁水准高测量,采用以下步骤:
[0028]
s1:在陆地和岛礁控制点上进行gnss联测和水准联测。
[0029]
具体讲,以该岛礁及其附近陆地为测量研究区域,收集该岛礁附近陆地上的控制点资料,以及该岛礁上的控制点资料,在陆地和岛礁控制点上进行gnss联测和水准联测。请参见图2,图2展示了陆地和岛礁控制点资料,其中小方框内1、2、3、4号点位是岛礁控制点。
[0030]
s2:利用陆地上gnss大地高成果和水准高成果,获得陆地gnss/水准高程异常。
[0031]
具体讲,将陆地上控制点的gnss大地高h0减去水准高h,计算获得gnss/水准高程异常ξ
gnss/水准
=h
0-h。请参见图3,图3示出了陆地控制点gnss/水准高程异常。
[0032]
s3:利用步骤s2的gnss/水准高程异常和相应的egm2008重力场模型高程异常,计算陆地残余高程异常,记为rea。
[0033]
egm2008重力场模型是美国国家地理信息空间情报局(nga)采用最新数据的基础上研制并发布的地球重力场模型,是迄今为止分辨率高、精度最好、阶次最多的全球重力场模型。请参见图4,图4展示了该岛礁及其附近陆地在egm2008重力场模型下1
′×1′
格网高程异常示意图。
[0034]
首先利用egm2008重力场模型,计算陆地控制点在egm2008重力场模型下的高程异常ξ
egm
,然后将步骤s2获得的gnss/水准高程异常减去ξ
egm
,可得残余高程异常,即为rea,计
算公式如下:rea=ξ
gnss/水准-t
k,egm
。请参见图5,图5展示了陆地控制点的残余高程异常。
[0035]
s4:构建bp神经网络,利用bp神经网络建立陆地控制点北坐标x和东坐标y与残余高程异常的非线性关系。
[0036]
具体讲,构建五层bp神经网络,分别为输入归一化层、输入层、隐含层、输出层、输出反归一化层;以陆地控制点的北坐标x和东坐标y为输入数据,控制点的残余高程异常为输出数据,隐含层节点数设定为5个。请参见图6,图6展示了构建的五层bp神经网络。
[0037]
s5:利用步骤s1中陆地控制点的北坐标x和东坐标y以及步骤s3的残余高程异常rea,对步骤s4建立的bp神经网络进行训练。
[0038]
测量研究区域位置如图2所示,选取陆地控制点中的24个点,构建训练样本集;选取陆地控制点中剩余的14个点,构建检验样本集。请参见图7和图8,图7展示了bp神经网络训练样本,图8展示了bp神经网络检验样本。
[0039]
利用训练样本对bp神经网络进行训练,设定学习速率、动量系数、迭代世代、输入归一化层数目、输入层数目、隐含层数目、输出层数目、输出反归一化层数目。
[0040]
表1bp神经网络模型设定参数表
[0041]
学习速率动量系数迭代世代输入归一化层数目 0.40.752 输入层数目隐含层数目输出层数目输出反归一化层数目2511 [0042]
将训练样本中的北坐标x、东坐标y作为bp神经网络模型的输入,将得到的结果与训练样本的输出样本数据残余高程异常rea对比计算误差,将误差反向传播修正模型中的待求参数,经过迭代训练得到训练后的bp神经网络模型。
[0043]
以样本的平均值和中误差作为模型分析验证的基本标准。它的计算公式为:
[0044]m平
=∑|δ|/n;
ꢀꢀꢀ
(1)
[0045][0046]
其中,n为参与检验样本的数量,δ为bp神经网络输出值与样本残余高程异常的差值。
[0047]
将检验样本数据代入训练好的bp神经网络模型进行检验。经检验,检验样本平均值为-2.6cm,中误差为
±
3.9cm。说明bp神经网络模型的训练满足要求。
[0048]
s6:将步骤s1中岛礁控制点的北坐标x和东坐标y作为输入参数,代入步骤s5已经训练完成的bp神经网络模型,计算出该点的残余高程异常rea
bp
。
[0049]
具体讲,选择测量研究区域岛礁上的4个控制点作为预测点,构建预测样本,将样本数据中控制点北坐标x和东坐标y作为输入参数,代入步骤s5中训练好的bp神经网络模型,计算出控制点的残余高程异常rea
bp
。请参见图9,图9示出了采用训练后的bp神经网络预测的岛礁控制点残余高程异常rea
bp
。
[0050]
s7:利用步骤s6计算得到的岛礁控制点的残余高程异常rea
bp
补偿岛礁控制点的egm2008重力场下的高程异常ξ
egm
,获得岛礁控制点的高程异常ξ=ξ
egm
+rea
bp
。
[0051]
具体讲,利用egm2008重力场模型,计算出岛礁控制点在egm2008重力场下的高程异常ξ
egm
,然后利用步骤s6计算出的残余高程异常rea
bp
进行补偿,获得岛礁控制点的高程异
常ξ=ξ
egm
+rea
bp
。
[0052]
s8:利用步骤s1获得的岛礁控制点gnss大地高h0和步骤s7获得的高程异常ξ,可获得岛礁控制点的水准高h=h
0-ξ=h
0-ξ
egm-rea
bp
。
[0053]
具体讲,将步骤s1获得的岛礁控制点gnss大地高h0和步骤s7获得的高程异常ξ,进行求差,获得岛礁控制点的水准高h=h
0-ξ=h
0-ξ
egm-rea
bp
。
[0054]
将步骤s1测得的岛礁控制点水准高程与神经网络计算的高程进行对比分析,分析结果如下:
[0055]
表2控制点对比分析结果(单位m)
[0056] 统计|δ|最大值0.034|δ|最小值0.002平均值-0.004中误差0.024
[0057]
其中,δ为岛礁高程与基于神经网络跨海传递的高程差值。
[0058]
从表中可以看出,采用基于神经网络跨海传递的高程可以达到较高的传递精度,满足近海岛礁跨海高程传递的需求。
[0059]
综上,本发明提供了一种基于神经网络学习的近海岛礁高程传递方法,采用以下步骤:
[0060]
s1:在陆地和岛礁控制点上进行gnss联测,并在陆地控制点上进行水准测量;
[0061]
s2:利用陆地上gnss大地高成果和水准高成果,获得陆地gnss/水准高程异常;
[0062]
s3:利用步骤s2的gnss/水准高程异常和相应的egm2008重力场模型高程异常,计算陆地残余高程异常,记为rea;
[0063]
s4:构建bp神经网络,利用bp神经网络建立陆地控制点北坐标x和东坐标y与残余高程异常的非线性关系;
[0064]
s5:利用步骤s1陆地控制点的北坐标x、东坐标y以及步骤s3的残余高程异常rea,对步骤s4建立的bp神经网络进行训练;
[0065]
s6:将岛礁控制点的北坐标x和东坐标y作为输入参数,代入步骤s5已经训练完成的bp神经网络模型,计算出该点的残余高程异常rea
bp
;
[0066]
s7:利用步骤s6计算岛礁控制点的残余高程异常rea
bp
补偿岛礁控制点的egm2008重力场下的高程异常ξ
egm
,获得岛礁控制点的高程异常ξ=ξ
egm
+rea
bp
;
[0067]
s8:利用步骤s1获得的岛礁控制点gnss大地高h0和步骤s7获得的高程异常,可获得岛礁控制点的水准高h=h
0-ξ=h
0-ξ
egm-rea
bp
。,
[0068]
其中,h0为岛礁控制点的大地高,ξ
egm
为岛礁控制点的egm2008重力场模型下的高程异常,rea
bp
为步骤s6计算的残余高程异常。
[0069]
尽管上面结合附图对本发明的优选实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围的情况下,还可以做出很多形式,这些均属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1