一种基于机器学习实现垃圾清运车辆异常行驶的检测方法与流程
1.本发明涉及垃圾清运车辆管理技术领域,尤其涉及一种基于机器学习实现垃圾清运车辆异常行驶的检测方法。
背景技术:
2.随着小区入住率不断提高,装修建筑垃圾的堆放、运输和处置成为一大难题。垃圾清运车辆通常会有规定的行驶路线和起终点,车辆必须按照规定路线行驶。由于监管垃圾清运车辆行驶线路和装卸倾倒等任务上需要大量的人力资源,现有技术实现上述功能需要投入大量的硬件设备,导致这一问题成为长久以来的技术难点。
3.发明专利申请cn202011217624.0公开了基于垃圾分类的环卫管理方法、系统、终端及存储介质,并具体公开了方法包括:获取单位模块的模块垃圾信息;获取数据库中环卫车的环卫车信息,根据模块垃圾信息和环卫车信息,调取一定数量的环卫车,将环卫车与单位模块绑定;获取单位模块内各个垃圾点的垃圾点信息;生成关于单位模块内各个垃圾点的优先顺序总表;按照优先顺序总表,根据垃圾点的垃圾点信息,以及与单位模块绑定的环卫车的环卫车信息,将垃圾点与环卫车绑定,生成每辆环卫车的优先顺序子表;获取城市道路信息,根据城市道路信息和优先顺序子表,规划日常路径。该发明主要解决环卫车路径规划问题,并未针对环卫车工作期间是否按规定路线行驶进行监管。
4.发明专利申请cn202111495456.6公开了基于5g的城市垃圾管理系统和管理方法,并具体公开了系统包括管理平台、多个5g微基站、运转车、回收站和多个垃圾箱,管理平台、运转车、回收站和每个垃圾箱上均设置有5g模块,以使管理平台、运转车、垃圾箱和回收站能够与5g微基站进行通讯以接入区域网中;管理平台用于预先存储垃圾箱、运转车和回收站的位置信息,以及用于接收来自垃圾箱的需要被清理的信息,以及用于预先规划运转车的行驶路径并发送至运转车;运转车根据管理平台发送的行驶路径信息清理垃圾箱,并将垃圾运转至回收站;5g微基站,用于当垃圾箱或运转车的位置发生变化时,重新确定垃圾箱或运转车的位置。该发明主要解决运转车路径规划问题,并未针对运转车工作期间是否按规定路线行驶进行监管。
技术实现要素:
5.本发明旨在降低人力成本和硬件需求下,同时能够实时监控垃圾清运车辆行为,及时发现并处理违规车辆,为此提出一种基于机器学习实现垃圾清运车辆异常行驶的检测方法。
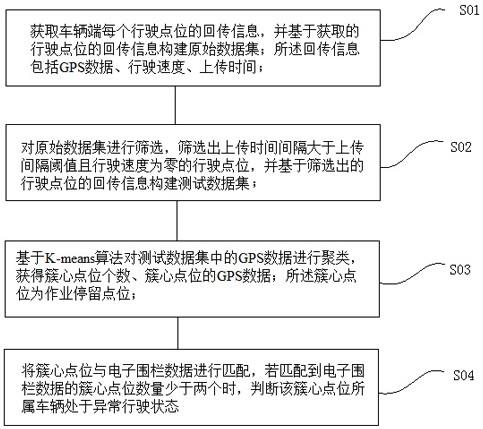
6.本发明提供一种基于机器学习实现垃圾清运车辆异常行驶的检测方法,包括:步骤s01,获取车辆端每个行驶点位的回传信息,并基于获取的行驶点位的回传信息构建原始数据集;其中,所述回传信息包括gps数据、行驶速度、上传时间;步骤s02,对原始数据集进行筛选,筛选出上传时间间隔大于上传间隔阈值且行驶速度为零的行驶点位,并基于筛选出的行驶点位的回传信息构建测试数据集;
步骤s03,基于k-means算法对测试数据集中的gps数据进行聚类,获得簇心点位个数、簇心点位的gps数据;所述簇心点位为作业停留点位;步骤s04,将簇心点位与电子围栏数据进行匹配,若匹配到电子围栏数据的簇心点位数量少于两个时,判断该簇心点位所属车辆处于异常行驶状态。
7.该方法在远程控制中心执行,该远程控制中心可接收来自不同车辆端的回传信息,每个回传信息与每个车辆编号绑定存储,则一个车辆编号下有多个行驶点位的回传信息,同一个车辆编号下的所有回传信息构建成一个原始数据集。本发明方法针对同一车辆的数据集进行异常行驶检测,通过多次再现此方法流程,对多个车辆分别进行异常行驶检测。当控制中心对某个车辆编号下的数据集检测发现异常时,则确定该车辆编号所属的车辆存在异常行驶行为,便于对该车辆进行告警,整改驾驶行为。
8.所述回传信息通过车辆端上的车载gps设备采集车辆行驶速度和gps数据并将其回传。由于车载gps设备会因为车辆行驶状态或周边环境导致上传信号不稳定,则上传时间间隔不一致,则无法直接将实时采集数据投入分析,无法直接判断车速为零的情况就是因垃圾清运车作业而停留的点位。为此,需要对采集数据进行筛选,排除因红绿灯临时停车等其他停车情况;进一步通过k-means算法来准确获取作业停留点位。尤其是在不清楚车辆行驶路线或运行趟数下,k-means算法能基于筛选后的数据获得进一步准确的因作业停车的数据结果。
9.该发明利用机器学习算法,将所需数据量降到最低,能够用相对简单快速的方法对垃圾车进行行车监控并判断车辆行驶行为,同时可以降低算法对于路口及红绿灯停车的误判,尽量少的人工介入降低了人工成本,也减少了认为产生的误差和不公平因素。
10.作为优选,方法还包括:步骤s05,在判断该簇心点位所属车辆处于异常行驶状态后,触发人工审核流程,对符合异常行驶状态的车辆进行告警。
11.作为优选,方法还包括:步骤s40,基于簇心点位和测试数据集中的行驶点位,形成往返行驶路线。
12.作为优选,所述步骤s40与所述步骤s04的执行顺序可同步进行,或者,所述步骤s40在所述步骤s04前执行,或者所述步骤s40在所述步骤s04后执行。
13.作为优选,所述步骤s40包括:步骤s41,基于欧几里德距离原理,将每个簇心点位与测试数据集中的行驶点位进行距离匹配,获得与每个簇心点位距离最近的行驶点位;步骤s42,将步骤s41获得的行驶点位所对应的簇心点位的gps数据合并到所述测试数据集中,并基于行驶点位的上传时间排序形成路线数据集;步骤s43,依次遍历所述路线数据集中每个点位是否属于同一个作业停留点位,若是,则遍历下一个点位;若否,记录当前点位,再遍历下一个点位;当遍历完路线数据集中所有点位后,基于记录下的点位形成往返行驶路线。
14.作为优选,所述步骤s41还包括:将与簇心点位距离最近的行驶点位,同其对应的簇心点位关联在一起,使得两个相对应的行驶点位和簇心点位能被确认为同一个作业停留点位,并将行驶点位的上传时间作为簇心点位的上传时间。
15.作为优选,所述步骤s01还包括:计算原始数据集中每个行驶点位的上传时间间隔,并将通过众数计算获得的上传时间间隔作为上传间隔阈值。
16.作为优选,所述步骤s02包括:步骤s21,对原始数据集进行筛选,筛选出上传时间间隔大于上传间隔阈值的行驶点位;步骤s22,对步骤s21中筛选出的行驶点位进一步筛选,获得行驶速度为零的行驶点位;步骤s23,基于筛选出的行驶点位的回传信息构建测试数据集。
17.作为优选,所述步骤s03包括:步骤s31,基于k-means算法对测试数据集中的gps数据进行聚类,计算聚类过程中的聚类点间的误差平方;其中,k为聚类数,c为聚类中心,x为簇中数据点;步骤s32,基于步骤s31计算获得的sse和聚类数构建肘部图,并基于肘部图的成像情况确定真实的聚类数,并将该真实的聚类数确定为作业停留点位个数;所述步骤s33,调用python中的机器学习算法库中的聚类模块,将步骤s32确定的停留点位个数作为簇心个数进行聚类,进而获得簇心点位的gps数据。
18.作为优选,方法还包括步骤s00,在步骤s01之前,基于垃圾清运的既定点位,在电子围栏库中存储包含既定点位的电子围栏数据。
19.本发明具有以下有益效果:本发明一种基于机器学习实现垃圾清运车辆异常行驶的检测方法,简单快速识别车辆是否在规划路线行驶,并对异常行为车辆进行告警。该方法能减少对路口及红绿灯停车的误判,准确识别出因作业停车的情况,在降低人工监控成本下,精准识别车辆行驶行为。
附图说明
20.图1为本发明一种基于机器学习实现垃圾清运车辆异常行驶的检测方法的流程图。
具体实施方式
21.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
22.如图1,本发明一种基于机器学习实现垃圾清运车辆异常行驶的检测方法,包括:步骤s01,获取车辆端每个行驶点位的回传信息,并基于获取的行驶点位的回传信息构建原始数据集;其中,所述回传信息包括gps数据、行驶速度、上传时间;步骤s02,对原始数据集进行筛选,筛选出上传时间间隔大于上传间隔阈值且行驶速度为零的行驶点位,并基于筛选出的行驶点位的回传信息构建测试数据集;步骤s03,基于k-means算法对测试数据集中的gps数据进行聚类,获得簇心点位个数、簇心点位的gps数据;所述簇心点位为作业停留点位;步骤s04,将簇心点位与电子围栏数据进行匹配,若匹配到电子围栏数据的簇心点位数量少于两个时,判断该簇心点位所属车辆处于异常行驶状态。
23.车辆端通过车载gps设备实时采集车辆行驶速度和gps数据,并将此数据连通该车辆的车辆编号一同上传给控制中心,本发明方法由控制中心实现,控制中心对收到的各个行驶点位的回传信息进行处理。
24.由于车辆在行驶过程中会因为各种原因停车,如因红绿灯、路口等情况临时停车、因需要装卸垃圾进行作业而停车,则需要对收到的所有行驶点位的回传信息进行筛选。在实际场景中,经调研确定车辆因红绿灯等原因临时停车其gps上传时间间隔不会改变。为此,需要对原始数据集进行基于上传时间间隔判断条件来筛选,排除因红绿灯、路口临时停车的情况,使得最终留下的行驶速度为0的行驶点位尽可能是因作业停车的点位。
25.为了进一步获取准确的作业停留点位,通过k-means算法进行聚类,当簇中数据和与之对应的聚类中心不再发生变化时,即确定聚类数,以确定出准确的作业停留点位。
26.基于获得的作业停留点位数量和gps数据,通过判断是否与电子围栏数据匹配,来判断车辆是否到达电子围栏数据中的既定点作业。当到达的点少于两个时,则该车辆存在异常行驶行为,即行驶轨迹存在异常。上述两个的设置数量可根据实际需要更改。其中,包含既定点位的电子围栏数据在步骤s01前,基于垃圾清运的既定点位,预先在电子围栏库中存储。
27.为了提高判断精准性,本发明方法还包括步骤s05,在判断该簇心点位所属车辆处于异常行驶状态后,触发人工审核流程,对符合异常行驶状态的车辆进行告警。通过人工审核流程进行二次审核判断,例如通过查看异常点附近视频记录、如查验异常点与既定点位的位置、如查验车辆是否存在故障等等。对确定为异常行驶的车辆进行警告和入库。所述人工审核流程由控制中心发送人工审核指令给终端,如检测人员的手机端或pad端或电脑端。
28.在进行步骤s02的筛选前,需要对步骤s01中原始数据集的每个行驶点位进行上传时间间隔计算。为此,所述步骤s01还包括:计算原始数据集中每个行驶点位的上传时间间隔,并将通过众数计算获得的上传时间间隔作为上传间隔阈值。对计算获得的多个上传时间间隔进行众数计算,获得该车辆统一的gps上传时间间隔,并将其作为上传间隔阈值。若不做此步计算,该上传间隔阈值可根据经验确定。在计算出每个行驶点位的上传时间间隔后将其保存,之后在步骤s02时可对计算出来的上传时间间隔与上传间隔阈值进行比较判断。
29.所述步骤s02基于满足上传时间间隔条件和行驶速度条件下,筛选出较为准确的数据。具体地,所述步骤s02包括:步骤s21,对原始数据集进行筛选,筛选出上传时间间隔大于上传间隔阈值的行驶点位;步骤s22,对步骤s21中筛选出的行驶点位进一步筛选,获得行驶速度为零的行驶点位;步骤s23,基于筛选出的行驶点位的回传信息构建测试数据集。
30.此过程先利用上传时间间隔条件来排除上传时间间隔较为稳定的数据,包含了正常行驶的数据、因红绿灯、路口停车的数据。这样,步骤s22能快速基于步骤s21筛选出的结果获得行驶速度为零的行驶点位的数据。
31.步骤s02也可先通过行驶速度条件筛选出所有情况导致停车的数据,继而再依据上传时间间隔条件来排除非作业停车的数据。
32.所述步骤s03具体包括:步骤s31,基于k-means算法对测试数据集中的gps数据进行聚类,计算聚类过程中的聚类点间的误差平方;其中,k为聚类数,c为聚类中心,x为簇中数据点;步骤s32,基于步骤s31计算获得的sse和聚类数构建肘部图,并基于肘部图的成像情况确定真实的聚类数,并将该真实的聚类数确定为作业停留点位个数;所述步骤s33,调用python中的机器学习算法库中的聚类模块,将步骤s32确定的停留点位个数作为簇心个数进行聚类,进而获得簇心点位的gps数据。
33.所述gps数据主要为经纬度数据,使用误差平方和sse用来衡量k-means算法的好坏。随着聚类数k的增大,样本划分的更加精细,那么平方误差和sse会逐渐变小,呈现出来的图像是先下降的很快,后平缓,在其邻接的地方图像上呈现为手肘状,因此形象的称其为手肘法。绘制肘部图,根据肘部图的成像情况判断k值即作业停留点的数量(此方法用于车辆行驶路线或运行趟数不明确的情况,如运行趟数明确,k值直接取作业停留点个数即可)。
34.当车辆行驶路线不明确下,本发明方法还包括步骤s40,基于簇心点位和测试数据集中的行驶点位,形成往返行驶路线。
35.所述步骤s40包括:步骤s41,基于欧几里德距离原理,将每个簇心点位与测试数据集中的行驶点位进行距离匹配,获得与每个簇心点位距离最近的行驶点位;步骤s42,将步骤s41获得的行驶点位所对应的簇心点位的gps数据合并到所述测试数据集中,并基于行驶点位的上传时间排序形成路线数据集;步骤s43,依次遍历所述路线数据集中每个点位是否属于同一个作业停留点位,若是,则遍历下一个点位;若否,记录当前点位,再遍历下一个点位;当遍历完路线数据集中所有点位后,基于记录下的点位形成往返行驶路线。
36.在步骤s41中,通过欧几里德距离公式,其中,,为行驶点位的数据,,为聚类获得的簇心数据。通过计算最短距离,匹配出与簇心点位距离最近的行驶点位,使聚类点最后落在车辆行驶线路上。为此,所述步骤s41还包括:将与簇心点位距离最近的行驶点位,同其对应的簇心点位关联在一起,使得两个相对应的行驶点位和簇心点位能被确认为同一个作业停留点位,并将行驶点位的上传时间作为簇心点位的上传时间。这样,在步骤s43时,可快速判断路线数据集中的每个点位是否为同一个作业停留点位,这样就不需要重复标记停留点位。
37.在步骤s42中,将步骤s41获得的行驶点位所对应的簇心点位的gps数据合并到所述测试数据集中,可以直接无序合并,或者根据测试数据集中的行驶点位,将对应的簇心点位合并至其后。之后基于上传时间,对测试数据集中的各个点位进行排序,形成路线数据集。这样步骤s43依序遍历相当于根据时间遍历出路线轨迹,最终形成往返行驶路线。
38.所述步骤s40与所述步骤s04的执行顺序可在步骤s03后同步进行,或者,所述步骤s40在所述步骤s04前执行,或者所述步骤s40在所述步骤s04后执行。所述步骤s40形成往返
行驶路线后保存在数据库内,并可在步骤s05时发送给人工端,由人工端复核行车轨迹是否存在异常。
39.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1