一种温漂自补偿的预压力自调节压阻噪声传感器的制作方法
1.本发明涉及噪声传感器领域,特别是一种温漂自补偿的预压力自调节压阻噪声传感器。
背景技术:
2.配电站中需要对机械组件进行声学质量分析,或需要对噪声信号进行实时采集和监测,噪声传感器作为把声音信号转化为电信号,经内部电路处理,再以模拟量或数字量的形式输出给分析系统采集分析使用的终端器件,压阻噪声传感器利用半导体材料的压阻效应而实现对声压的测量,利用半导体材料在被测压力作用下引起其内部应力变化导致其电阻值变化,压阻噪声传感器是采用集成工艺将电阻条集成在单晶硅膜片上,制成硅压阻芯片,并将此芯片的周边固定封装于外壳之内,引出电极引线,压阻噪声传感器不同于粘贴式应变计需通过弹性敏感元件间接感受外力,而是直接通过硅膜片感受被测压力的,半导体材料对温度比较敏感,其导电性能随温度的增加而呈现指数形式变化。现有技术中由半导体材料制成的压阻噪声传感器的输出信号在温度影响下产生温度漂移,影响噪声传感器的测量精度,在配电房环境温度改变时测量精度不够理想。
技术实现要素:
3.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于现有技术中存在的问题,提出了本发明。
5.因此,本发明所要解决的技术问题是温度影响下产生温度漂移,影响噪声传感器的测量精度。
6.为解决上述技术问题,本发明提供如下技术方案:一种温漂自补偿的预压力自调节压阻噪声传感器,其包括传感器,所述传感器包括感压膜片、力敏电阻条、驱动线圈、偏置永磁体、磁致伸缩棒、控制器、温度传感器和外壳体,以及;
7.移动单元,所述移动单元包括槽板、设置于槽板内的容置腔、滑动连接槽板的移动框架和设置于槽板上的支撑框架,所述传感单元设置于移动框架的一端。
8.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述所述力敏电阻条两端分别连接于感压膜片、磁致伸缩棒和外壳体,感压膜片将噪声声压传递至力敏电阻条,力敏电阻条电阻改变引起测量电信号变化。
9.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述所述磁致伸缩棒在驱动线圈和偏置永磁体产生的驱动磁场作用下产生形变,调节力敏电阻条的预压力;
10.所述偏置永磁体产生偏置磁场,使磁致伸缩棒在初始状态产生伸长形变,控制器通过控制驱动线圈的驱动电流方向,实现磁致伸缩棒的伸长和缩短,从而增大或减小力敏
电阻条的预应力。
11.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述所述控制器、温度传感器、驱动线圈,偏置永磁体组成闭环控制系统,温度传感器采集配电房环境温度,并将温度信号输入控制器,控制器根据智能调节算法实时计算并输入驱动线圈相应的控制电流,驱动磁致伸缩棒产生形变;
12.配电房环境温度升高,力敏电阻条电阻值增大,驱动线圈产生于偏置永磁体永磁磁场相反方向的电磁场,缩短磁致伸缩棒的长度并减小预压力,补偿力敏电阻条的预应力;
13.配电房环境温度降低,力敏电阻条电阻值减小,驱动线圈产生于偏置永磁体永磁磁场相同方向的电磁场,增大磁致伸缩棒的长度并增加预压力,补偿力敏电阻条的预应力。
14.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述槽板内设置有伸缩块、齿板、轨道槽和齿轮柱,所述伸缩块一端连接容置腔内壁,伸缩块另一端伸出槽板外,所述齿板一端滑动连接伸缩块,齿板另一端滑动连接轨道槽,所述齿轮柱一端滑动连接轨道槽,齿轮柱另一端连接支撑框架,所述齿轮柱与齿板相互啮合。
15.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述移动框架的两侧端面设置有滑块,所述槽板的外壁设置有滑槽,所述滑块嵌入滑槽,所述移动框架上还设置有方槽,所述支撑框架一端嵌入方槽内,所述方槽的内壁设置有卡槽,所述支撑框架的侧面设置有卡块,所述卡块嵌入卡槽。
16.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述支撑框架上设置有旋转按钮和翘板件,所述旋转按钮的侧面设置有环形凹槽,所述支撑框架的端面凹陷形成有翘板槽,所述翘板件一端嵌入环形凹槽,翘板件另一端嵌入翘板槽,所述翘板件转动连接方槽内壁,所述旋转按钮的底部端面设置设置有凸柱和弹簧,所述支撑框架的底部端面设置有圆孔,所述凸柱穿过圆孔嵌入齿轮柱。
17.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述伸缩块的一端设置有弹簧,伸缩块的底部端面设置有t型槽,所述齿板顶部端面设置有连接杆,所述连接杆的顶端设置有第一挡块,所述第一挡块嵌入t型槽,所述齿板底部端面设置有第二挡块,所述第二挡块嵌入轨道槽。
18.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述齿轮柱顶部端面凹陷形成有柱槽,齿轮柱的底部端面设置有第三挡块,所述凸柱嵌入柱槽,所述第三挡块嵌入轨道槽。
19.作为本发明所述一种温漂自补偿的预压力自调节压阻噪声传感器的一种优选方案,其中:所述槽板侧面设置有直槽,所述伸缩块一端伸出直槽外。
20.本发明的有益效果:本发明结构简单、易于安装、应用方便。
附图说明
21.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
22.图1为第一个和第二个实施例中的整体示意图。
23.图2为第一个和第二个实施例中的装置俯视图。
24.图3为第一个和第二个实施例中的磁致伸缩棒伸缩示意图。
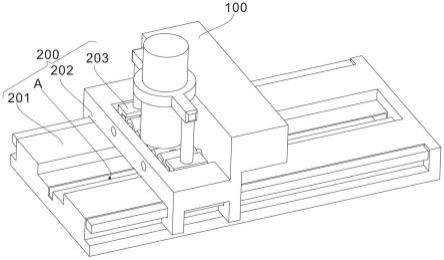
25.图4为第三个实施例中的移动单元整体示意图。
26.图5为第三个实施例中的移动单元整体剖面示意图。
27.图6为第三个实施例中的移动框架示意图。
28.图7为第三个实施例中的槽板示意图。
29.图8为第三个实施例中的槽板内部爆炸示意图。
30.图9为第三个实施例中的支撑框架示意图。
具体实施方式
31.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
32.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
33.其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
34.实施例1
35.参照图1~图3,为本发明第一个实施例,该实施例提供了一种温漂自补偿的预压力自调节压阻噪声传感器,其特征在于:包括,包括,传感器100,传感器100包括感压膜片101、力敏电阻条102、驱动线圈103、偏置永磁体104、磁致伸缩棒105、控制器106、温度传感器107、外壳体108。
36.进一步的,力敏电阻条102两端分别连接于感压膜片101、磁致伸缩棒105和外壳体108,感压膜片101将噪声声压传递至力敏电阻条102,力敏电阻条102电阻改变引起测量电信号变化。
37.进一步的,磁致伸缩棒105在驱动线圈103和偏置永磁体104产生的驱动磁场作用下产生形变,调节力敏电阻条102的预压力;
38.进一步的,偏置永磁体104产生偏置磁场,使磁致伸缩棒105在初始状态产生伸长形变,控制器106通过控制驱动线圈103的驱动电流方向,实现磁致伸缩棒105的伸长和缩短,从而增大或减小力敏电阻条102的预应力。
39.进一步的,控制器106、温度传感器107、驱动线圈103,偏置永磁体104组成闭环控制系统,温度传感器107采集配电房环境温度,并将温度信号输入控制器106,控制器根据智能调节算法实时计算并输入驱动线圈103相应的控制电流,驱动磁致伸缩棒105产生形变;
40.进一步的,配电房环境温度升高,力敏电阻条102电阻值增大,驱动线圈103产生于偏置永磁体104永磁磁场相反方向的电磁场,缩短磁致伸缩棒105的长度并减小预压力,补偿力敏电阻条102的预应力;
41.配电房环境温度降低,力敏电阻条102电阻值减小,驱动线圈103产生于偏置永磁
体104永磁磁场相同方向的电磁场,增大磁致伸缩棒105的长度并增加预压力,补偿力敏电阻条102的预应力。
42.实施例2
43.参照图1~图3,为本发明第二个实施例,该实施例基于上一个实施例,本发明提供的一种温漂自补偿的预压力自调节压阻噪声传感器,通过温度传感器107采集配电房环境温度,并将温度信号输入控制器106,控制器106根据智能调节算法实时计算并输入驱动线圈103相应的控制电流,驱动磁致伸缩棒105产生形变,补偿力敏电阻条102的预应力,提高在配电房环境温度改变时压阻噪声传感器的测量精度。
44.如图1所示,本发明提供的一种温漂自补偿的预压力自调节压阻噪声传感器,包含感压膜片,力敏电阻条102,驱动线圈103,偏置永磁体104,磁致伸缩棒105,控制器106,温度传感器107,外壳体108。所述磁致伸缩棒105在驱动线圈103和偏置永磁体104产生的驱动磁场作用下产生形变,调节力敏电阻条102的预压力;所述偏置永磁体104产生偏置磁场,使磁致伸缩棒105在初始状态产生伸长形变,控制器106通过控制驱动线圈103的驱动电流方向,实现磁致伸缩棒105的伸长和缩短,从而增大或减小力敏电阻条102的预应力。
45.如图2所示,所述四个力敏电阻条102两端分别连接于感压膜片、磁致伸缩棒105和外壳体108,感压膜片将噪声声压传递至力敏电阻条102,力敏电阻条102电阻改变引起测量电信号变化。四个力敏电阻条102的设计过程中,压阻系数、初始电阻值、温度系数和灵敏度系数应该基本相同,并有相同的几何形状与尺寸,同时扩散掺杂尽量接近。
46.如图3所示,所述控制器106、温度传感器107、驱动线圈103,偏置永磁体104组成闭环控制系统,温度传感器107采集配电房环境温度,并将温度信号输入控制器106,控制器106根据智能调节算法实时计算并输入驱动线圈103相应的控制电流,驱动磁致伸缩棒105产生形变;配电房环境温度升高,力敏电阻条102电阻值增大,驱动线圈103产生于偏置永磁体104永磁磁场相反方向的电磁场,缩短磁致伸缩棒105的长度并减小预压力,补偿力敏电阻条102的预应力;配电房环境温度降低,力敏电阻条102电阻值减小,驱动线圈103产生于偏置永磁体104永磁磁场相同方向的电磁场,增大磁致伸缩棒105的长度并增加预压力,补偿力敏电阻条102的预应力。
47.实施例3
48.参照图4~图9,为本发明第三个实施例,该实施例基于上一个实施例,本发明提供的一种温漂自补偿的预压力自调节压阻噪声传感器,包括移动单元200,所述移动单元200包括槽板201、设置于槽板201内的容置腔a、滑动连接槽板201的移动框架202和设置于槽板201上的支撑框架203,所述传感单元100设置于移动框架202的一端,槽板201内设置有伸缩块201a、齿板201b、轨道槽201c和齿轮柱201d,伸缩块201a一端连接容置腔a内壁,伸缩块201a另一端伸出槽板201外,齿板201b一端滑动连接伸缩块201a,齿板201b另一端滑动连接轨道槽201c,齿轮柱201d一端滑动连接轨道槽201c,齿轮柱201d另一端连接支撑框架203,齿轮柱201d与齿板201b相互啮合,设置槽板201的作用是便于本传感器在槽板201上来回移动,且能便于本传感器随时拆除和安装,初始状态时,伸缩块201a伸出槽板201外,本传感器从槽板201的一端嵌入,通过伸缩块201将本传感器限位在槽板201上移动。
49.进一步的,移动框架202的两侧端面设置有滑块202a,槽板201的外壁设置有滑槽201e,滑块202a嵌入滑槽201e,移动框架202上还设置有方槽202b,支撑框架203一端嵌入方
槽202b内,方槽202b的内壁设置有卡槽202b-1,支撑框架203的侧面设置有卡块203a,卡块203a嵌入卡槽202b-1。
50.进一步的,支撑框架203上设置有旋转按钮203b和翘板件203c,旋转按钮203b的侧面设置有环形凹槽203b-1,支撑框架203的端面凹陷形成有翘板槽203d,翘板件203c一端嵌入环形凹槽203b-1,翘板件203c另一端嵌入翘板槽203d,翘板件203c转动连接方槽202b内壁,旋转按钮203b的底部端面设置设置有凸柱203b-2和第一弹簧203b-3,支撑框架203的底部端面设置有圆孔203e,凸柱203b-2穿过圆孔203e嵌入齿轮柱201d,设置环形凹槽203b-1可以保证旋转按钮203b旋转的同时,翘板件203c的一端始终嵌入在环形凹槽203b-1内。
51.进一步的,伸缩块201a的一端设置有第二弹簧201a-1,伸缩块201a的底部端面设置有t型槽201a-2,齿板201b顶部端面设置有连接杆201b-1,连接杆201b-1的顶端设置有第一挡块201b-2,第一挡块201b-2嵌入t型槽201a-2,齿板201b底部端面设置有第二挡块201b-3,第二挡块201b-3嵌入轨道槽201c,设置第二弹簧201a-1可以保证移动框架(202)从槽板(201)上拆卸之后,伸缩块201a恢复到初始位置,便于重复使用。
52.进一步的,齿轮柱201d顶部端面凹陷形成有柱槽201d-1,齿轮柱201d的底部端面设置有第三挡块201d-2,凸柱203b-2嵌入柱槽201d-1,第三挡块201d-2嵌入轨道槽201c,第三挡块201d-2可以保证齿轮柱201d随着旋转按钮203b同步移动。
53.进一步的,槽板201侧面设置有直槽201e,伸缩块201a一端伸出直槽201e外。
54.使用本装置时,通过螺栓或者膨胀螺丝将槽板201固定在墙体上,然后将移动框架202从槽板201的一端滑入槽板201,通过滑块202a与滑槽201e的配合将移动框架202限位在槽板201上滑动,支撑框架203设置在移动框架202内,会随着移动框架202同步移动,当按压旋转按钮203b时,第一弹簧203b-3收缩,凸柱203b-2穿过柱槽201d-1,翘板件203c设置在翘板槽203d的一端下降,翘板件203c另一端上升,继而带动支撑框架203整体上升,而支撑框架203的侧面又设置有卡块203a,卡块203a嵌入卡槽202b-1,但卡槽202b-1的高度要比卡块203a高,也就给卡块203a的上升留有一定的空间的同时又不会使得支撑框架203脱离移动框架202,支撑框架203的整体上升会使得支撑框架203的底部端面脱离与槽板201的接触,此时的支撑框架203就可以实现来回滑动的目的,当松开旋转按钮203b,旋转按钮203b在第一弹簧203b-3的作用下回弹,就会使得支撑框架203的底部端面与槽板201接触,使其在没有外力干扰与其摩擦力的作用下固定不动,当需要将本装置从槽板201上拆卸下来时,按压旋转按钮203b,使得旋转按钮203b底部的凸柱203b-2嵌入柱槽201d-1,柱槽201d-1的深度比凸柱203b-2嵌入的部分要长,因此就不会出现按压不动的情况,且本装置在移动时,凸柱203b-2始终嵌入柱槽201d-1内,转动旋转按钮203b,使得凸柱203b-2带动齿轮柱201d转动,为保证不会出现跟转的情况,在凸柱203b-2的表面或者柱槽201d-1的内壁设置不规则的坚硬凸起,在保证凸柱203b-2可以嵌入的同时增大摩擦力,防止跟转,齿轮柱201d转动就会驱动齿板201b的移动,齿板201b设置有两个,分别设置在齿轮柱201d的两侧,齿轮柱201d的转动会使得齿板201b向内移动,而齿板201b的另一端又连接着伸缩块201a,因此,设置在槽板201两侧的伸缩块201a就会向内收缩,继而解除伸缩块201a与滑块202a的配合,此时将凸柱203b-2从柱槽201d-1内拔出就可以将移动框架202从槽板201上拆卸下来了。
55.应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术
方案进行修改或者等同替换,而不脱离发明发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1