一种基于无人机集群的雷达信号同步分布式分选及定位方法
1.本发明涉及雷达信号分选技术领域,尤其涉及一种基于无人机集群的雷达信号同步分布式分选及定位方法。
背景技术:
2.随着各种电子对抗装置的数量迅速增加,电磁威胁环境的信号密度已达到数百万数量级。现代雷达正朝着多功能、多用途方向发展,其波形变得更加复杂,规律性也逐渐降低。这些都对分选和定位方法的准确性、实时性和可靠性提出了更高的要求。传统方法采用结构化数据学习特征,对雷达发射器进行分选和定位。聚类和随机森林是机器学习分选算法研究中常用的算法。wang等人在2014年发表在circuits,systems,and signal processing上的工作《multiple-parameterradar signal sorting using support vector clustering and similitude entropyindex》发现基于雷达信号分选方法的传统支持向量聚类(svc)时间复杂度较高,而传统有效性指标的缺点是不能有效表示最佳分选。为此,作者提出了一种基于分选方法和新索引(相似熵,se)的新型锥簇标记(ccl)。初始聚类中心的随机选择使其更容易陷入局部最优聚类,不适用于非球形数据。针对这个问题,feng等人在2017年发表在iccc上的工作《radar signal sorting algorithm of k-meansclustering based on data field》提出了基于数据场的k-means聚类雷达信号分选算法,此算法可以自动获取初始簇中心和簇号。然而,k-means算法对噪声敏感,需要手动设置集群的数量,这是其精度难以突破的瓶颈。近年来,出现了许多启发式优化算法。reddy等人在2017年发表在iccmc上的工作《optimization of k-means algorithm:ant colony optimization》采用蚁群算法优化k-means算法。li等人在2020年发表在journal of physics:conferenceseries上的工作《a new clustering and sortingalgorithm for radar emitter signals》提出了一种改进的基于数据域的k-means聚类算法。由于结构化数据的信息表示固定且有限,其准确性难以提高。此外,传统方法只能单一聚焦于分类或者聚类任务,因而不能同步对雷达信号进行分选及定位。因此需要详细设计高效的同步信号分选及定位方法,以满足高精度信号分选及定位的需要。
技术实现要素:
3.本发明针对现有研究的一些不足之处,提出了一种基于无人机集群的雷达信号同步分布式分选及定位方法,利用无人机集群、雷达信号图像化映射、目标检测同步分选及定位和数据并行的分布式协同计算来进行雷达信号的分选及定位的方法。该方法考虑到单个无人机运算能力和存储能力的有限性和集群环境中无人机的数量优势,在数据和模型上都适配于无人机集群环境,实现了高精度的雷达信号分选及定位,并进一步利用无人机集群环境提升分选效率;将结构化雷达信号数据映射为图像化雷达信号数据,使用压缩的pp-yoloe模型分选并定位图像化雷达信号数据,利用数据并行分布式协同计算方法加速模型的运算速度。本发明为无人机集群环境下高精度分选并定位雷达信号的问题提供了一种新
的解决方法。
4.本发明的技术方案:
5.一种基于无人机集群的雷达信号同步分布式分选及定位方法,步骤如下:
6.步骤1、在无人机集群环境下随机确定一个无人机头节点,其他无人机节点为计算节点;
7.步骤2、利用步骤1中所构建的计算节点收集雷达信号结构化数据并将其发送到无人机头节点;无人机头节点接收并缓存计算节点发来的雷达信号结构化数据,并在一定时间间隔后将其转换为图像化雷达信号数据;无人机头节点将这些图像化雷达信号数据分发给计算节点;计算节点丢弃之前收集到的随时间线性增长的雷达信号结构化数据,并保存图像化雷达信号数据;
8.步骤3、无人机头节点将压缩的pp-yoloe模型结构(一种基于yolo模型的改进的单阶段anchor-free目标检测模型)和pp-yoloe模型的初始权重广播给计算节点,计算节点基于步骤2中的图像化雷达信号数据并根据pp-yoloe模型结构计算前向传播的损失值,并将反向传播的梯度值返回给无人机头节点;无人机头节点整合损失的梯度值以优化pp-yoloe模型权重,之后将优化后的pp-yoloe模型权重分发给各个计算节点;计算节点迭代计算前向传播的损失值并返回损失的梯度值,无人机头节点迭代整合损失梯度并优化pp-yoloe模型,直至pp-yoloe模型收敛;
9.步骤4、无人机头节点分发步骤3中所得的收敛pp-yoloe模型给计算节点;计算节点利用收敛pp-yoloe模型对最新收集到的雷达信号进行分选及定位,得到雷达信号的类别和雷达信号辐射源的位置。
10.所述步骤2具体为:
11.2.1)计算节点通过雷达信号接收器收集雷达信号结构化数据;雷达信号结构化数据包括到达时间toa、到达方向doa、脉冲重复间隔pri、射频rf和脉冲宽度pw五个参数;通过到达时间计算出雷达信号辐射源与雷达信号接收器之间的距离,到达时间和到达方向作为极坐标系下的r和θ参数来定位雷达信号辐射源;脉冲重复间隔、射频和脉冲宽度用于对雷达信号进行分选;计算节点在收集到雷达信号结构化数据后,将其发送给无人机头节点;
12.2.2)无人机头节点在一定的时间间隔后,缓存了一定量的雷达信号结构化数据后,使用雷达信号图像化映射方法,将其映射为图像化雷达信号数据;将单个雷达信号结构化数据(doa,toa,pri,rf,pw)表示为向量x∈r5,因在单位时间t内,当雷达信号接收器捕获m个雷达信号时,雷达信号矩阵为x∈rm×5来呈现这些系列雷达信号;此外,使用;上标x(i)来表示矩阵x中的第i个样本,下标xj来表示矩阵中的第j个特征向量x;最终雷达信号矩阵表示为
13.x=(x
(1)
,x
(2)
,...,x(i),...,x
(m)
),
14.其中雷达信号矩阵x等价于单位时间t内雷达信号的结构化数据表;
15.之后将雷达信号结构化数据五参数doa、toa、pri、rf、pw映射成图像五参数,宽、高、红、绿、蓝进行图像表示;对于每一个向量x(i),它被映射到图像中的一个像素点,表示为
16.[0017][0018][0019]
因此整个结构化数据表,矩阵x,映射成一个图像矩阵i
[0020]
i=(p
(1)
,p
(2)
,...,p(i),...,p
(m)
),
[0021]
映射方法包括归一化和逆归一化;归一化表示为
[0022][0023]
其中min(x)是一个矩阵,每一列都是雷达信号矩阵x范围内的最小常数值;max(x)是一个矩阵,其每一列都是雷达信号矩阵x范围内的最大常数值;逆归一化是归一化的反函数,记为
[0024]
n-1
(x,i)=x
⊙
(max(i)-min(i))+min(i),
[0025]
其中
⊙
是元素矩阵乘法;
[0026]
最后,结合归一化和逆归一化等式,得映射函数为
[0027]
m(x,i)=n-1
(n(x),i),
[0028]
2.3)无人机头节点将映射好后的图像化雷达信号数据分发给各个计算节点,保证之后分布式协同计算中训练数据的一致性。
[0029]
所述步骤3具体为;
[0030]
3.1)在每个计算节点都收到了一致的训练数据后,无人机头节点将压缩的pp-yoloe模型结构和pp-yoloe模型的初始权重分发给计算节点,以开始分布式协同计算过程;
[0031]
3.2)计算节点随机选择一个批次n个训练数据,使用二元交叉熵来计算前向传播的损失值,其公式如下
[0032][0033]
其中,x为雷达信号数据,y为雷达信号数据对应的类型,w为模型需要学习的权重,h(x)为输入x通过非线性激活函数的映射值,λ为正则化超参数;得到一个批次的损失loss(x,y,w)后,计算节点使用链式法则计算反向传播的梯度值并将其返回给无人机头节点;
[0034]
3.3)无人机头节点收到各个计算节点的损失梯度后,通过公式
[0035][0036]
整合一个批次的梯度损失值,然后使用随机梯度下降算法优化该批次的pp-yoloe模型权重;
[0037][0038]
其中,η为优化算法的学习率;
[0039]
3.4)计算节点迭代计算前向传播的损失值并返回损失的梯度值,头节点迭代整合
损失梯度并优化模型,直至pp-yoloe模型收敛。
[0040]
所述步骤4具体为;
[0041]
4.1)头节点将训练完毕的收敛模型广播给计算节点;头节点将训练完毕的模型分发给计算节点一次,使用已训练好的收敛模型进行预测;无需像训练时迭代更新模型;
[0042]
4.2)计算节点根据收到的收敛模型结构和模型权重,对新收集到的雷达信号进行分选和定位。因训练时需要迭代更新模型权重,通信损失大,故分布式扩展后可以非线性地减少训练用时;在预测时,因仅需要通信一次获得训练完毕的模型权重,分布式扩展后可以近线性地提升推理速度。
[0043]
所述雷达信号结构化数据的生成过程如下;
[0044]
首先模拟信号发射器的数据;将每个场景中的信号发射器数量设置为1到7,平均为4;
[0045]
随机确定模拟信号的数量和类型,生成0到1之间的每个信号发射器的到达方向和到达时间,并生成脉冲重复间隔、射频和脉冲宽度在对应信号类型的参数区间中;
[0046]
然后将误差值添加到信号发射器的数据中,并将每个信号发射器数据扩展为实际接收数据的多个信号数据;
[0047]
误差e
error
服从均值0,标准差σ为0.02到0.05范围内随机值的正态分布:
[0048][0049]
其中e
error
∈r5,表示到达时间、到达方向、脉冲重复间隔、射频和脉冲宽度的误差值;假设雷达发射器信号向量生成雷达数据的向量:
[0050][0051]
模拟的数据是无人机群在单位时间内接收到的所有信号,任务是根据这些信号找到实际的信号发射器并识别其类型。
[0052]
所述雷达信号结构化数据的前两个参数到达方向和到达时间作为位置信息来识别雷达信号辐射源的地理位置,其余三个参数脉冲重复间隔、射频和脉冲宽用于区分信号的类型;将五个参数生成0到1的归一化值;根据参数脉冲重复间隔、射频和脉冲宽度值将信号分为不同的类型;对于不同类型的每个参数,其范围的长度为0.4,但左右边界不同。
[0053]
所述五类信号的参数,左边界选择0、0.15、0.3、0.45和0.6;相应地,右边界从0.4、0.55、0.7、0.85和1.0中选择;在这种情况下,相邻两个区间的取值范围的重叠长度为0.25,占单个区间的62.5%。
[0054]
在无人机集群环境下确定一个无人机头节点,其他无人机节点则称为计算节点。因为模型和数据都是适配无人机集群环境的,头节点和计算节点的计算压力并无显著差异,故而头节点和计算节点的身份是可互换的,这一特征可以有效地避免头节点单点故障的问题。
[0055]
本发明的有益效果:本发明基于无人机集群和pp-yoloe模型提出了一种基于无人机集群的雷达信号同步分布式分选及定位方法。为了更准确、高效地分选并定位雷达信号
并考虑到单个无人机算力和存储空间的有限性,本发明还提出了基于雷达信号图像化映射的方法来压缩雷达信号所占用的存储空间,使用压缩的pp-yoloe模型和数据并行的分布式协同计算方法降低模型的存储空间并加速模型的运算速度。实验结果表明,本发明提出的方法在分选和定位雷达信号方面更加准确,并且相比于其他的方法,本发明内存占用低且运行速度快。本发明提供了雷达信号分选和定位的一种新方法,为无人机集群环境下的雷达信号分选及定位提供了一种新的解决方案。
附图说明
[0056]
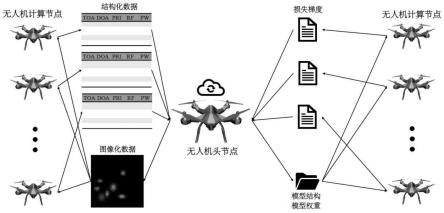
图1为雷达信号同步分布式分选及定位方法的框架图,无人机头节点左侧为数据收集和图像化映射部分,无人机头节点右侧为分布式协同计算部分。
[0057]
图2为结构化雷达信号数据转化为图像化雷达信号的示例图,(a)-(d)中雷达信号的密度依次增大,存储空间节省率也依次增大。
[0058]
图3为不同模型算法在框架中应用的对比图,(a)为模型的f-score和推理速度对比图;(b)为模型大小和训练时间对比图;其中tradition为logistics regression和mean-shift两个传统算法的组合。
[0059]
图4为pp-yoloe模型压缩对比图,(a)为模型的f-score和推理速度对比图;(b)为模型大小和训练时间对比图。
[0060]
图5为micro pp-yoloe模型分布式扩展对比图,(a)为模型的f-score和推理速度对比图;(b)为模型大小和训练时间对比图;
[0061]
图6为图像化雷达信号的仿真检测图,(a)-(d)分别为图2中(a)-(d)所对应的仿真检测的结果图;仿真检测图比示例图中多出的方框、圆圈和标记均由模型预测生成,图中方框上方标记出了雷达信号的类型,方框中间的白色圆圈标记出了雷达信号辐射源的位置。
具体实施方式
[0062]
为了使本发明的目的、技术方案和优点更加清楚,下面将对本发明的具体实施方式作进一步的详细描述。
[0063]
本发明实例提供了一种基于无人机集群的雷达信号同步分布式分选及定位方法,该方法包括:
[0064]
步骤1):
[0065]
在无人机集群环境下确定一个无人机头节点,其他无人机节点则称为无人机计算节点。因为模型和数据都是适配无人机集群环境的,无人机头节点和无人机计算节点的计算压力并无显著差异,故而无人机头节点和无人机计算节点的身份是可互换的,这一特征可以有效地避免无人机头节点单点故障的问题。
[0066]
步骤2):
[0067]
利用步骤1)中所构建的无人机计算节点收集雷达信号数据并将其发送到无人机头节点。无人机头节点接收并缓存计算节点们发来的结构化数据,并在一定时间间隔后将其转换为图像数据,之后,无人机头节点再将这些图像化数据分发给无人机计算节点。无人机计算节点丢弃之前收集到的随时间线性增长的结构化数据,并保存图像数据。
[0068]
实验制作了雷达信号仿真数据集以供分选和定位实验,利用雷达信号的前两个参
数doa和toa作为位置信息来识别信号源的地理位置,其余三个参数pri、pw和rf用于区分信号的类型。为了方便后续计算和处理,将这些参数生成0到1的归一化值。根据参数pri、pw和rf值将信号分为五类。对于不同类型的每个参数,其范围的长度为0.4,但左右边界不同。这五种信号的参数,其左边界可以选择0、0.15、0.3、0.45和0.6。相应地,它们的右边界可以从0.4、0.55、0.7、0.85和1.0中选择。在这种情况下,相邻两个区间的取值范围的重叠长度为0.25,占单个区间的62.5%,增加了分类任务的复杂度。为了生成雷达信号的结构化数据,首先模拟信号发射器的数据。将每个场景中的发射器数量设置为1到7,平均为4。随机确定要模拟的信号的数量和类型,生成o到1之间的每个发射器的doa和toa,并生成其余三个参数在对应信号类型的参数区间中。然后将误差值添加到数据中,并将每个发射器数据扩展为更接近实际接收数据的多个信号数据。误差e
error
服从均值0,标准差σ为0.02到0.05范围内随机值的正态分布:
[0069][0070]
其中e
error
∈r5,表示五个参数的误差值。假设雷达发射器信号向量可以生成雷达数据的向量:
[0071][0072]
仿真的数据是无人机群在单位时间内接收到的所有信号,任务是根据这些信号找到实际的信号发射器并识别其类型。
[0073]
2.1)计算节点通过雷达信号接收器收集雷达信号结构化数据。雷达信号结构化数据以雷达脉冲描述字(pdw)来表示,其包括到达时间(toa)、到达方向(doa)、脉冲重复间隔(pri)、射频(rf)和脉冲宽度(pw)五个主要参数。通过toa可以计算出雷达信号辐射源与无人机雷达信号接收器之间的距离,故toa和doa可以看作极坐标系的下的r和θ参数来定位雷达信号辐射源;pri、rf和pw则用来对雷达信号进行分选。计算节点在收集到pdw数据后,将其发送给头节点。
[0074]
2.2)无人机头节点在一定的时间间隔后,即缓存了一定量的pdw结构化数据后,使用雷达信号图像化映射方法,将其映射为图像化雷达信号数据。将单个雷达信号(doa,toa,pri,rf,pw)表示为向量x∈r5,因此在单位时间t内,如果雷达接收器捕获m个雷达信号,则雷达信号矩阵x∈rm×5来呈现这些系列雷达信号。此外,使用上标x(i)来表示矩阵x中的第i个样本,而使用下标xj来表示矩阵中的第j个特征向量x。因此,雷达信号矩阵表示为
[0075]
x=(x
(1)
,x
(2)
,...,x(i),...,x
(m)
),
[0076]
其中雷达信号矩阵x等价于单位时间t内雷达信号的结构化数据表。
[0077]
之后将雷达信号参数(doa、toa、pri、rf、pw)映射成图像参数(宽、高、红、绿、蓝)进行图像表示。对于每一个向量x(i),它被映射到图像中的一个像素点,表示为
[0078][0079]
[0080][0081]
因此整个结构化数据表,矩阵x,可以映射成一个图像矩阵i
[0082]
i=(p
(1)
,p
(2)
,...,p(i),...,p
(m)
).
[0083]
映射方法包括归一化和逆归一化。归一化表示为
[0084][0085]
其中min(x)是一个矩阵,每一列都是原始矩阵x范围内的最小常数值;类似地,max(x)是一个矩阵,其每一列都是原始矩阵x范围内的最大常数值。逆归一化是归一化的反函数,记为
[0086]
n-1
(x,i)=x
⊙
(max(i)-min(i))+min(i),
[0087]
其中
⊙
是元素矩阵乘法,i是图像映射后对应的矩阵数据域。
[0088]
最后,结合归一化和逆归一化等式,可得映射函数为
[0089]
m(x,i)=n-1
(n(x),i).
[0090]
2.3)无人机头节点将映射好后的图像化雷达数据分发给各个无人机计算节点,以保证之后分布式协同计算中训练数据的一致性。
[0091]
步骤3):
[0092]
无人机头节点将压缩的pp-yoloe模型结构和初始模型权重广播给无人机计算节点,计算节点基于步骤2)中所生成的图像化雷达数据并根据模型结构计算前向传播的损失值,并将反向传播的梯度值返回给无人机头节点。无人机头节点整合损失的梯度值以优化模型的权重,之后将优化后的模型权重分发给各个无人机计算节点。无人机计算节点迭代计算前向传播的损失值并返回损失的梯度值,无人机头节点迭代整合损失梯度并优化模型,直至模型收敛;
[0093]
3.1)在确保每个无人机计算节点都收到了一致的训练数据后,无人机头节点将压缩的pp-yoloe模型结构和初始化的权重分发给无人机计算节点,以开始分布式协同计算过程。
[0094]
3.2)计算节点随机选择一个批次大小n个训练数据,使用二元交叉熵来计算前向传播的损失值,其公式如下
[0095][0096]
得到一个批次的损失loss(x,y,w)后,无人机计算节点使用链式法则计算反向传播的梯度值并将其返回给无人机头节点。
[0097]
3.3)无人机头节点收到各个无人机计算节点的损失梯度后,通过公式
[0098][0099]
整合一个批次的梯度损失值,然后使用随机梯度下降算法来优化这一个批次的模型权重。
[0100][0101]
3.4)之后无人机计算节点迭代计算前向传播的损失值并返回损失的梯度值,无人机头节点迭代整合损失梯度并优化模型,直至模型收敛。
[0102]
步骤4):
[0103]
头节点分发步骤3)中所得的收敛模型给无人机计算节点。无人机计算节点利用收敛模型对最新收集到的雷达信号进行分选及定位,得到雷达信号的类别和雷达信号辐射源的位置。
[0104]
4.1)无人机头节点将训练完毕的收敛模型广播给无人机计算节点。使用已训练好的模型进行预测时,仅需要无人机头节点将训练完毕的模型分发给无人机计算节点一次,无需像训练时迭代更新模型;
[0105]
4.2)无人机计算节点根据收到的模型结构和模型权重,对新收集到的雷达信号进行分选和定位。因训练时需要迭代更新模型权重,通信损失大,故分布式扩展后可以非线性地减少训练用时;在预测时,因仅需要通信一次获得训练完毕的模型权重,分布式扩展后可以近线性地提升推理速度。
[0106]
图3、4、5为不同模型算法的对比图。图中每个模型的标记有四种大小,对应图2中四种不同的密度,其中标记越大,密度越大。图中虚线则为四种密度下模型的平均表现。图3中可以看到pp-yoloe的精度最高,并且其他指标介于其他模型中间。图4中mini pp-yoloe的模型的层数和特征图的通道数为基准pp-yoloe模型的67%和75%,而micro pp-yoloe压缩到了33%和50%。从图中可知,在几乎没有精度损失的情况下,micro pp-yoloe模型其他三个指标都有了很大的提升。图5中在精度未明显损失的情况下,分布式扩展使推理速度近线性增加,使训练时间非线性减少。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1