一种全景作业场多参数一体化测量方法及系统
本发明涉及一种适用于保障潜水作业场安全的一体化观测技术,具体涉及一种一种全景作业场多参数一体化测量方法及系统,更具体地,涉及一种利用体积阵设计技术实现多海洋参数一体化测量的方法。
背景技术:
1、潜水作业是高风险作业。水下淤泥、暗流、渔网、水面坠物、以及水下生物袭击等都是潜水员的致命威胁。在潜水作业中,为保障作业安全以及保证作业任务完成,对作业场信息的获取至关重要。目前,在信息获取上主要以多个分立设备的方式实现,例如,利用水下成像声纳获得作业场图像信息,利用测深仪获得地形深度信息,利用侧扫声纳获得地貌信息。多个分立设备同时使用,导致操作复杂,声兼容性差,而且设备之间形成信息孤岛,信息传输不便,缺乏统一的管理机制。常规作业场观测大多采用多个分立设备,导致潜水作业场观测技术目前存在设备多、操作复杂等问题。
技术实现思路
1、本发明的目的是针对目前潜水作业场观测需要多设备、操作复杂等问题,设计多参数一体化测量技术,提出了一种全景作业场多参数一体化测量方法及系统。
2、本发明提出了一种全景作业场多参数一体化测量方法,该方法利用平面阵,通过对各个阵元的回波信号充分利用,实现包括地形、地貌和成像的多参数一体化测量;所述方法包括以下步骤:
3、1)设计换能器阵型:采用面阵设计获得立体空间,波束控制采用体积阵设计;并基于换能器的各个阵元发射波束信号,并获取回波信号;
4、2)基于获取的体积阵回波信号,分别进行以下操作:
5、采用线列阵设计地形测量方法,通过航行形成海底地形图像;
6、利用背向散射特性获取地貌信息;
7、对换能器的横向和纵向分别进行波束扫描,形成水下图像。
8、作为上述技术方案的改进之一,所述换能器阵型在布阵时选择二维无稀疏阵元排列。
9、作为上述技术方案的改进之一,所述采用线列阵设计地形测量方法,通过航行形成海底地形图像,具体包括以下步骤:
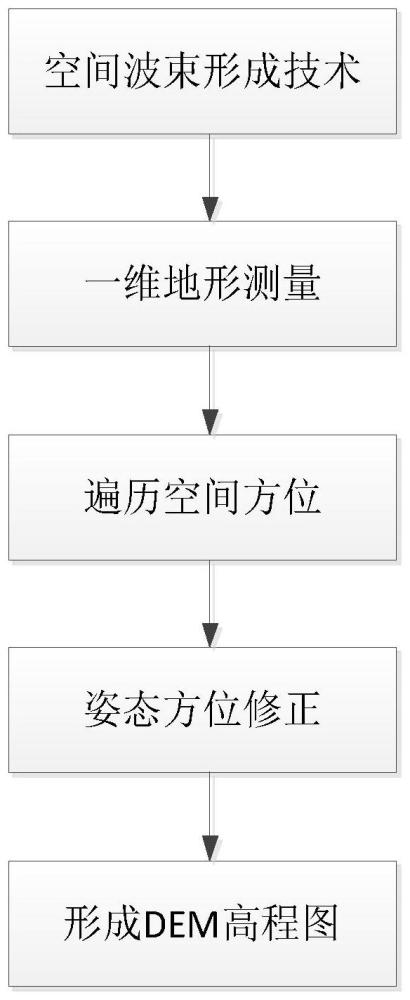
10、首先基于阵元信号进行空间波束形成,其次进行一维地形测量,采用时间加权方法获取每个波束角下的海底高程信息,并估算每个波束的波束回声到达时刻,从而获取海底位置;然后利用换能器姿态信息完成位置归算,最后形成数字高程模型图。
11、作为上述技术方案的改进之一,所述波束回声到达时刻的表达式为:
12、
13、其中,tc为波束回声达到达时刻,i为离散点,ti为每个离散点对应的时间,ai为每个离散点的强度。
14、作为上述技术方案的改进之一,所述利用换能器姿态信息完成位置归算包括:当换能器存在纵摇或/和横摇时,对海底位置进行修正。
15、作为上述技术方案的改进之一,当所述换能器存在纵摇时,修正的海底位置表达式为:
16、
17、其中,为修正后的海底位置,p为纵摇使得换能器随之绕x轴在yoz面内发生旋转的俯仰角角度,为波束形成后根据波束回声到达时刻得到的未修正的海底位置。
18、作为上述技术方案的改进之一,当所述换能器存在横摇时,修正的海底位置表达式为:
19、
20、其中,r为横摇使得换能器绕y轴在xoz面内发生旋转的横滚角角度。
21、作为上述技术方案的改进之一,所述利用背向散射特性获取地貌信息具体为:在每个波束回波内获得海底的背向散射强度ac,表达式为:
22、
23、作为上述技术方案的改进之一,所述对换能器阵型的横向回波信号进行波束扫描时,经过预成波束得到波束域信号模型,表达式为:
24、x(t)=as(t)+n(t)
25、其中,a为信号导向矢量,与目标距离阵列的距离和目标入射角度有关,f0为系统工作频率,为第n个阵元与目标之间的距离,n=1,2,3,…,n,n为阵元个数,rs为声源与基阵中心的距离,θs为导向角,xn为第n个阵元与基阵中心的距离,xn=(n-1)d,d为相邻阵元间距;s(t)为信号的复包络,为cw信号或chirp信号,n(t)为噪声和干扰信号;
26、将波束域接收信号x(t)以图像形式显示,获得水下图像。
27、本发明还提出了一种全景作业场多参数一体化测量系统,基于上述之一所述方法实现测量,所述系统包括:
28、换能器,采用面阵设计获得立体空间,波束控制采用体积阵设计,用于向水下作业场发射波束信号、接收回波信号;
29、地形测量模块,基于体积阵回波信号,采用线列阵设计地形测量方法,通过航行形成海底地形图像;
30、地貌测量模块,基于体积阵回波信号,利用背向散射特性获取地貌信息;和
31、声学成像模块,基于体积阵回波信号,对换能器阵型的横向和纵向分别进行波束扫描,形成图像。
32、本发明与现有技术相比优点在于:本发明利用平面阵实现地形、地貌、成像等多参数一体化测量,减少了设备数量,简化了操作流程,增强了信息综合利用能力。
技术特征:
1.一种全景作业场多参数一体化测量方法,该方法利用平面阵,通过对各个阵元的回波信号充分利用,实现包括地形、地貌和成像的多参数一体化测量;其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的全景作业场多参数一体化测量方法,其特征在于,所述换能器阵型在布阵时选择二维无稀疏阵元排列。
3.根据权利要求1所述的全景作业场多参数一体化测量方法,其特征在于,所述采用线列阵设计地形测量方法,通过航行形成海底地形图像,具体包括以下步骤:
4.根据权利要求3所述的全景作业场多参数一体化测量方法,其特征在于,所述波束回声到达时刻的表达式为:
5.根据权利要求3所述的全景作业场多参数一体化测量方法,其特征在于,所述利用换能器姿态信息完成位置归算包括:当换能器存在纵摇或/和横摇时,对海底位置进行修正。
6.根据权利要求5所述的全景作业场多参数一体化测量方法,其特征在于,当所述换能器存在纵摇时,修正的海底位置表达式为:
7.根据权利要求5所述的全景作业场多参数一体化测量方法,其特征在于,当所述换能器存在横摇时,修正的海底位置表达式为:
8.根据权利要求1所述的全景作业场多参数一体化测量方法,其特征在于,所述利用背向散射特性获取地貌信息具体为:在每个波束回波内获得海底的背向散射强度ac,表达式为:
9.根据权利要求1所述的全景作业场多参数一体化测量方法,其特征在于,所述对换能器阵型的横向回波信号进行波束扫描时,经过预成波束得到波束域信号模型,表达式为:
10.一种全景作业场多参数一体化测量系统,基于权利要求1-9之一所述方法实现测量,其特征在于,所述系统包括:
技术总结
本发明涉及一种全景作业场多参数一体化测量方法及系统,该方法利用平面阵,通过对各个阵元的回波信号充分利用,实现包括地形、地貌和成像的多参数一体化测量;所述方法包括以下步骤:1)设计换能器阵型:采用面阵设计获得立体空间,波束控制采用体积阵设计;并基于换能器的各个阵元发射波束信号,并获取回波信号;2)基于获取的体积阵回波信号,分别进行以下操作:采用线列阵设计地形测量方法,通过航行形成海底地形图像;利用背向散射特性获取地貌信息;对换能器的横向和纵向分别进行波束扫描,形成水下海底图像。系统包括换能器、地形测量模块、地貌测量模块和声学成像模块。本发明利用平面阵实现了地形、地貌、成像等多参数一体化测量。
技术研发人员:刘佳,许枫
受保护的技术使用者:中国科学院声学研究所
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!