一种基于可变视野稳定云台的激光雷达及其实现方法
1.本发明属于雷达技术领域,涉及一种基于可变视野稳定云台的激光雷达及其实现方法。
背景技术:
2.基于激光雷达的环境感知能力是智能机器人自主移动的基础。目前对激光雷达采集到的地图数据因为机器人运动产生畸变,故提高slam的效果的方法一般有两种:
3.1.使用高精度传感器。
4.2.改进定位建图算法。
5.高精度的传感器价格高昂,性价比低,所以基本上采用改进定位建图算法进行克服。但是这种方法仍存在一定的局限性,不能避免畸变过大时的误差。故本发明提出在激光雷达的硬件部分进行改进,从航向角、俯仰角、横滚角等进行实时校正,使得从硬件层面克服机器人运动导致激光雷达数据畸变问题。
技术实现要素:
6.本发明的目的是针对现有技术的不足,提供一种基于可变视野稳定云台的激光雷达。
7.一种基于可变视野稳定云台的激光雷达,包括:
8.激光雷达;
9.用于搭载激光雷达的可变视野云台;
10.其中,所述可变视野云台包括:底座(1)、航向角平台(2)、支架(3)、俯仰角电机(4)、中框(5)、横滚角电机(6)、搭载平台(7)、俯仰角转动轴承(8)、横滚角转动轴承(9)、陀螺仪传感器。
11.所述底座(1)与机器人固定连接,跟随机器人进行运动。
12.所述航向角平台(2)与所述底座(1)间采用滑动连接;所述航向角平台(2)通过转轴经航向角电机驱动,实现在水平面内转动。
13.所述航向角平台(2)的上端面设有两个支架(3),可跟随平台(2)转动。
14.所述两个支架(3)的上端通过两个俯仰角转动轴承(8)与中框(5)连接;其中一个俯仰角转动轴承(8)与俯仰角电机传动轴连接,通过俯仰角电机(4)驱动。
15.所述中框(5)通过两个横滚角转动轴承(9)与搭载平台(7)连接,其中一个横滚角转动轴承(9)与横滚角电机传动轴连接,通过横滚角电机(6)驱动。
16.所述陀螺仪传感器用于采集所述搭载平台(7)的姿态信息。
17.作为优选,所述底座(1)为环状,内侧开有环状滑槽;所述航向角平台(2)的外侧设有与环状滑槽匹配的环状凸起,以实现所述航向角平台(2)能沿着环状滑槽滑动;
18.作为优选,所述航向角平台(2)的下方设有转轴,其经电机驱动,实现在水平面内转动。
19.作为优选,当所述中框(5)与所述航向角平台(2)平行时,两者间的距离满足激光雷达俯仰角变化要求。
20.作为优选,当所述中框(5)与所述搭载平台(7)平行时,两者间的距离满足激光雷达横滚角变化要求。
21.作为优选,所述陀螺仪传感器位于横滚角电机(6)与中框(5)间。
22.本发明的另一个目的是提供上述基于可变视野稳定云台的激光雷达的实现方法,具体是:
23.步骤s1:水平面校准
24.将中框(5)、搭载平台(7)处于水平位置,分别记为俯仰角复位位置、横滚角复位位置;同时校准陀螺仪传感器,并预设航向角平台(2)位置为航向角复位位置。
25.步骤s2:初始化
26.设置中框(5)、搭载平台(7)处于水平位置或与水平面呈一定角度位置记为俯仰角目标位置、横滚角目标位置,将当前航向角平台(2)位置记为航向角目标位置;
27.步骤s3:机器人开始移动,同时激光雷达启动,激光雷达实时采集障碍物到激光雷达的距离数据,进而构成3d点云地图。
28.步骤s4:控制器根据已获取3d点云地图数据判断机器人运动方向路面平整度,并结合陀螺仪传感器实时采集数据,实时调整航向角电机、俯仰角电机(4)、横滚角电机(6)的pid控制参数,实现在机器人姿态变化时通过电机控制航向角平台(2)、中框(5)、搭载平台(7)的摆动角度和摆动速度,进而实现搭载平台(7)的稳定;具体是:
29.4-1实时获取陀螺仪传感器的三轴加速度accx(t)、accy(t)、accz(t),二轴角速度gyrox(t)、gyroy(t);其中t表示当前时刻;
30.4-2累计角速度,得到二轴角度gyroanglex(t)、gyroangley(t);
31.gyroanglex(t)=gyroanglex(t-1)+gyrox(t)*δt
32.gyroangley(t)=gyroangley(t-1)+gyroy(t)*δt
33.其中δt表示间隔时间。
34.4-3根据三轴加速度,计算加速度计横滚角度accanglex(t)、加速度计俯仰角度accangley(t);
[0035][0036][0037]
4-4计算出搭载平台(7)的当前俯仰角p(t)和当前横滚角r(t),并根据机器人的转动角度获取当前航向角;
[0038]
p(t)=k1*gyroanglex(t)+k2*accanglex(t)
[0039]
r(t)=k1*gyroangley(t)+k2*accangley(t)
[0040]
其中k1、k2为权重;
[0041]
4-5控制器获取机器人运动角速度cmdangle(t),计算得到航向角平台的摆动角度yaw(t):
[0042]
yaw(t)=-cmdangle(t)
[0043]
4-6累计机器人运动方向n个点云高度平均变化量j,用以表征机器人运动方向路面平整度:
[0044][0045]
其中δh表示相邻点云高度差;
[0046]
4-7根据目标位置与当前俯仰角p(t)、当前横滚角r(t)、当前航向角,俯仰角电机(4)、横滚角电机(6)、航向角电机采用改进pid算法控制输出量:
[0047][0048]
其中uq(k)为电机输出量,eq(k)为当前角度q误差,eq(k-1)为上次角度q误差,kp、ki、kd为权重,q=1或2或3,分别表示俯仰角、横滚角、航向角。
[0049]
本发明的有益效果是:
[0050]
1.本发明采用俯仰角电机和横滚角电机根据陀螺仪传感器变化实时抵消由地面材质、凹凸不平、地形等引起的机器人姿态变化。
[0051]
2.本发明航向角平台接收机器人运动指令,抵消由于机器人转向引起的建图畸变。
[0052]
3.本发明可实现通过调控中框(5)、搭载平台(7)实现激光雷达三维数据采集,并经pid算法实时调控三个电机,进而消除雷达的畸变问题。
附图说明
[0053]
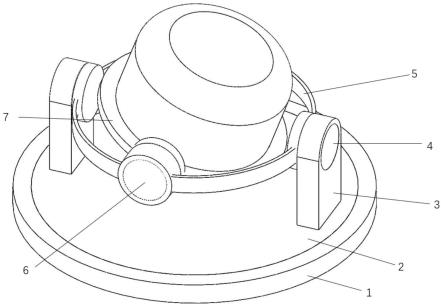
图1为本发明整体结构示意图。
[0054]
图2为本发明支架的侧视图。
[0055]
图3为图1的侧视图。
具体实施方式
[0056]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0057]
下面结合附图对本发明做进一步的分析。
[0058]
如图1-3所示,一种基于可变视野稳定云台的激光雷达,包括:激光雷达、可变视野云台;其中,所述可变视野云台包括:底座1、航向角平台2、支架3、俯仰角电机4、中框5、横滚角电机6、搭载平台7、俯仰角转动轴承8、横滚角转动轴承9、陀螺仪传感器。
[0059]
所述底座1与机器人固定连接,跟随机器人进行运动。
[0060]
所述航向角平台2与所述底座1间采用滑动连接;所述底座1为环状,内侧开有环状滑槽;所述航向角平台2的外侧设有与环状滑槽匹配的环状凸起,以实现所述航向角平台2能沿着环状滑槽滑动。所述航向角平台2的下端面设有转轴,该转轴与航向角电机的传输轴连接,经航向角电机驱动,实现在水平面内转动。
[0061]
所述航向角平台2的上端面的左右两侧固定有两个支架3,可跟随平台2转动。
[0062]
所述两个支架3的上端内设有俯仰角转动轴承8,所述俯仰角转动轴承8的内侧与中框5固定;其中一个俯仰角转动轴承8与俯仰角电机传动轴连接,通过俯仰角电机4驱动。
[0063]
所述中框5为圆环结构,通过两个横滚角转动轴承9与搭载平台7的下端侧连接,其中一个横滚角转动轴承9与横滚角电机传动轴连接,通过横滚角电机6驱动。
[0064]
所述搭载平台7的上端面与激光雷达固定连接。
[0065]
两个俯仰角转动轴承8的连线与两个横滚角转动轴承9的连线呈正交关系。
[0066]
所述陀螺仪传感器位于横滚角电机6与中框5间,用于采集所述搭载平台7的姿态信息。
[0067]
当所述中框5与所述航向角平台2平行时,两者间的距离满足激光雷达俯仰角变化要求。
[0068]
当所述中框5与所述搭载平台7平行时,两者间的距离满足激光雷达横滚角变化要求。
[0069]
上述基于可变视野稳定云台的激光雷达的实现方法,具体是:
[0070]
步骤s1:水平面校准
[0071]
将中框5、搭载平台7处于水平位置,分别记为俯仰角复位位置、横滚角复位位置;同时校准陀螺仪传感器,并预设航向角平台2位置为航向角复位位置。
[0072]
步骤s2:初始化
[0073]
设置中框5、搭载平台7处于水平位置或与水平面呈一定角度位置记为俯仰角目标位置、横滚角目标位置,将当前航向角平台2位置记为航向角目标位置;
[0074]
步骤s3:机器人开始移动,同时激光雷达启动,激光雷达实时采集障碍物到激光雷达的距离数据,进而构成3d点云地图。
[0075]
步骤s4:控制器根据已获取3d点云地图数据判断机器人运动方向路面平整度,并结合陀螺仪传感器实时采集数据,实时调整航向角电机、俯仰角电机4、横滚角电机6的pid控制参数,实现在机器人姿态变化时通过电机控制航向角平台2、中框5、搭载平台7的摆动角度和摆动速度,进而实现搭载平台7的稳定;具体是:
[0076]
4-1实时获取陀螺仪传感器的三轴加速度accx(t)、accy(t)、accz(t),二轴角速度gyrox(t)、gyroy(t);其中t表示当前时刻;
[0077]
4-2累计角速度,得到二轴角度gyroanglex(t)、gyroangley(t);
[0078]
gyroanglex(t)=gyroanglex(t-1)+gyrox(t)*δt
[0079]
gyroangley(t)=gyroangley(t-1)+gyroy(t)*δt
[0080]
其中δt表示间隔时间。
[0081]
4-3根据三轴加速度,计算加速度计横滚角度accanglex(t)、加速度计俯仰角度accangley(t);
[0082][0083][0084]
4-4计算出搭载平台7的当前俯仰角p(t)和当前横滚角r(t),并根据机器人的转动角度获取当前航向角;
[0085]
p(t)=k1*gyroanglex(t)+k2*accanglex(t)
[0086]
r(t)=k1*gyroangley(t)+k2*accangley(t)
[0087]
其中k1、k2为权重;
[0088]
4-5控制器获取机器人运动角速度cmdangle(t),计算得到航向角平台的摆动角度yaw(t):
[0089]
yaw(t)=-cmdangle(t)
[0090]
4-6累计机器人运动方向n个点云高度平均变化量j,用以表征机器人运动方向路面平整度:
[0091][0092]
其中δh表示相邻点云高度差;
[0093]
4-7根据目标位置与当前俯仰角p(t)、当前横滚角r(t)、当前航向角,俯仰角电机4、横滚角电机6、航向角电机采用改进pid算法控制输出量:
[0094][0095]
其中uq(k)为电机输出量,eq(k)为当前角度q误差,eq(k-1)为上次角度q误差,kp、ki、kd为权重,q=1或2或3,分别表示俯仰角、横滚角、航向角。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1