一种行星滚柱丝杠接触点位置相对运动速度测量装置的制作方法
1.本发明属于行星滚柱丝杠副技术领域,尤其涉及一种行星滚柱丝杠接触点位置相对运动速度测量装置。
背景技术:
2.在行星滚柱丝杠副中,主丝杠与滚柱的相对运动速度的大小影响了行星滚柱丝杠副的运动性能,相对运动速度的方向影响主丝杠与滚柱的螺纹形廓是否会发生曲率干涉。由于受到轴向速度和螺纹线速度的耦合影响,主丝杠与滚柱在接触点处的相对运动速度既不平行也不垂直,且受滚柱与内齿圈组成的齿轮啮合影响。通过数学模型难以直接得到主丝杠与滚柱接触点处的相对运动速度方向与大小。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提供了一种行星滚柱丝杠接触点位置相对运动速度测量装置,能够直接测量相对转速,提高了测量相对转速的精度。
4.本发明目的通过以下技术方案予以实现:一种行星滚柱丝杠接触点位置相对运动速度测量装置,包括:电机、电机座、刚性联轴器、转速传感器、转速传感器座、轴承及支座、移动滑台、待测丝杠、导轨和光栅尺;其中,所述电机设置在所述电机座上;所述转速传感器设置在所述转速传感器座上;
5.所述电机的输出轴与所述刚性联轴器的一端相连接,所述刚性联轴器的另一端与所述转速传感器相连接;所述转速传感器与所述待测丝杠的一端相连接;所述待测丝杠的另一端依次穿过所述轴承及支座和移动滑台;所述移动滑台通过滑块与导轨相连接;所述光栅尺设置在所述导轨上。
6.上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述轴承及支座包括轴承和轴承支座;其中,所述轴承设置于所述轴承支座上;所述待测丝杠的另一端穿设于所述轴承。
7.上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述待测丝杠包括主丝杠、圆光栅传感器、第一内齿圈、第二内齿圈、滚柱、第一保持架、第二保持架、第一轴承、第二轴承和螺母;其中,所述第一轴承的内圈与所述第一保持架的外侧相连接,所述第二轴承的内圈与所述第二保持架的外侧相连接;所述第一轴承的外圈与所述第二轴承的外圈均与上升移动滑台相连接;所述主丝杠的另一端依次穿过所述第二保持架和所述第一保持架;所述滚柱的一端与所述第一保持架相连接,所述滚柱的另一端与所述第二保持架相连接;所述螺母套设于所述滚柱的外表面;所述螺母的内表面、所述滚柱的表面与所述主丝杠的表面均存在同旋向的外螺纹,所述螺母、所述滚柱与所述主丝杠三者构成行星螺纹传动;
8.所述圆光栅传感器套设于所述第二保持架的一端;所述第一内齿圈的内齿与所述滚柱的一端的外齿齿轮啮合,所述第二内齿圈的内齿与所述滚柱的另一端的外齿齿轮啮合;所述主丝杠的一端穿过所述轴承及支座与所述转速传感器相连接。
9.上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述转速传感器能够测量所述主丝杠的自转转速;所述圆光栅传感器能够测量所述滚柱的公转转速,所述光栅尺能够测量移动滑台的位移。
10.上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述主丝杠的表面外螺纹的表达式为:
[0011][0012]
其中,rs为丝杠曲面矢径,θs为丝杠螺旋曲面的旋转角,f
xs
(us)为丝杠螺旋法截面x分量表达式,us为丝杠螺旋法面截型的独立变量,αs为丝杠螺旋升角,f
z's
(us)为丝杠螺旋法截面z分量表达式,p
0s
为丝杠螺旋参数。
[0013]
上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述滚柱的表面外螺纹的表达式为:
[0014][0015]
其中,rr为滚柱曲面矢径,θr为滚柱螺旋曲面的旋转角,f
xr
(ur)为滚柱螺旋法截面x分量表达式,f
z'r
(ur)为滚柱螺旋法截面z分量表达式,ur为滚柱螺旋法面截型的独立变量,αr为滚柱螺旋升角,p
0r
为滚柱螺旋参数,a为中心距。
[0016]
上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述主丝杠与所述滚柱在接触点处的相对运动速度v为:
[0017]
v=v
s1-v
r1-v
r2
[0018]
=r
θs
·
ω
s-r
θr
·
ω
r-ωe·
a;
[0019]
其中,v
s1
为主丝杠沿接触点所在螺旋线的瞬时线速度,v
r1
为滚柱沿接触点所在螺旋线的瞬时线速度,v
r2
为滚柱公转时的瞬时线速度,ωs为主丝杠角速度,ωr为滚柱角速度,ωe为滚柱公转角速度,r
θs
为丝杠曲面矢径对滚柱螺旋曲面的旋转角的偏导矢,r
θr
为滚柱曲面矢径对滚柱螺旋曲面的旋转角的偏导矢,a为中心距。
[0020]
上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述待测丝杠的中心轴线与所述轴承的中心轴线重合。
[0021]
上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述滚柱的数量为多个,其中,多个滚柱沿所述螺母的周向方向均匀分布。
[0022]
上述行星滚柱丝杠接触点位置相对运动速度测量装置中,所述第一轴承的中心轴线和所述第二轴承的中心轴线重合。
[0023]
本发明与现有技术相比具有如下有益效果:
[0024]
(1)本发明直接测量相对转速,相对运动速度大小与方向相对准确;
[0025]
(2)本发明通过改变结构实现增减齿轮传动,且不引入外来变量。
附图说明
[0026]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0027]
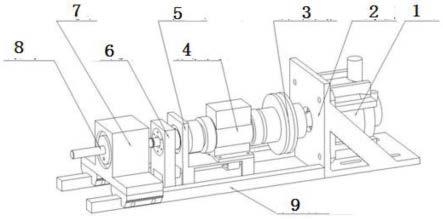
图1是本发明实施例提供的行星滚柱丝杠接触点位置相对运动速度测量装置的结构示意图;
[0028]
图2是本发明实施例提供的待测丝杠示意图;
[0029]
图3是本发明实施例提供的去除内齿圈后的待测丝杠图。
具体实施方式
[0030]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0031]
图1是本发明实施例提供的行星滚柱丝杠接触点位置相对运动速度测量装置的结构示意图。如图1所示,该行星滚柱丝杠接触点位置相对运动速度测量装置包括:电机1、电机座2、刚性联轴器3、转速传感器4、转速传感器座5、轴承及支座6、移动滑台7、待测丝杠8、导轨9和光栅尺;其中,
[0032]
电机1设置在电机座2上;转速传感器4设置在转速传感器座5上;电机1的输出轴与刚性联轴器3的一端相连接,刚性联轴器3的另一端与转速传感器4相连接;转速传感器4与待测丝杠8的一端相连接;待测丝杠8的另一端依次穿过轴承及支座6和移动滑台7;移动滑台7通过滑块与导轨9相连接;光栅尺设置在导轨9上。移动滑台7通过滑块与导轨9组成移动副,并通过光栅尺测量动滑台的位移。
[0033]
如图1所示,轴承及支座6包括轴承和轴承支座;其中,轴承设置于轴承支座上;待测丝杠8的另一端穿设于轴承。
[0034]
如图2所示,待测丝杠8包括主丝杠8-1、圆光栅传感器8-2、第一内齿圈8-3、第二内齿圈8-10、滚柱8-4、第一保持架8-5、第二保持架8-6、第一轴承8-7、第二轴承8-8和螺母8-9。其中,
[0035]
第一轴承8-7的内圈与第一保持架8-5的外侧相连接,第二轴承8-8的内圈与第二保持架8-6的外侧相连接;第一轴承8-7的外圈与第二轴承8-8的外圈均与上升移动滑台7相连接;主丝杠8-1的另一端依次穿过第二保持架8-6和第一保持架8-5;滚柱8-4的一端与第一保持架8-5相连接,滚柱8-4的另一端与第二保持架8-6相连接;螺母8-9套设于滚柱8-4的外表面;螺母8-9的内表面、滚柱8-4的表面与主丝杠8-1的表面均存在同旋向的外螺纹,螺母8-9、滚柱8-4与主丝杠8-1三者构成行星螺纹传动;圆光栅传感器8-2套设于第二保持架8-6的一端;第一内齿圈8-3的内齿与滚柱8-4的一端的外齿齿轮啮合,第二内齿圈8-10的内齿与滚柱8-4的另一端的外齿齿轮啮合;主丝杠8-1的一端穿过轴承及支座6与转速传感器4相连接。
[0036]
具体的,第一内齿圈8-3和第二内齿圈8-10的内侧均有内齿,滚柱8-4有8个,每个
的两端有外齿,与内齿圈进行齿轮啮合;同时,滚柱8-4与主丝杠8-1表面均存在同旋向的外螺纹,螺母内侧存在同旋向的内螺纹,这三者构成行星螺纹传动;第一轴承8-7与第二轴承8-8的内圈分别与第一保持架8-5和第二保持架8-6的外侧连接,第一轴承8-7与第二轴承8-8的外圈与移动滑台7连接,第二保持架8-6与圆光栅传感器8-2通过螺钉固连,第二保持架8-6、内齿圈8-3、螺母8-9、第一保持架8-5依次轴向连接并利用单键防止周向窜动,8个滚柱8-4的两端分别与第一保持架8-5、第二保持架8-6内侧的8个盲孔连接,限制滚柱之间的相对位置。
[0037]
转速传感器4能够测量主丝杠8-1的自转转速;圆光栅传感器8-2能够测量滚柱8-4的公转转速,光栅尺9能够测量移动滑台7的位移。
[0038]
如图3所示,由于内齿圈8-3与滚柱8-4均靠第一保持架8-5和第二保持架8-6固定相对位置,因此内齿圈仅提供齿轮传动约束,将其去除后,滚柱8-4依然可以与主丝杠8-1、螺母8-9构成行星螺纹传动,并且内齿圈8-3与其余零件非固定连接,拆装方便的同时减少了其它变量的产生。
[0039]
通过测试台组成结构可知,转速传感器4可直接测量主丝杠的自转转速,圆光栅传感器8-2可直接测量滚柱的公转转速,光栅尺9可直接测量动滑台的位移。
[0040]
相对运动速度测试方法
[0041]
1、找到主丝杠与滚柱的实际接触点p,通过微分几何求得接触点处主丝杠与滚柱的公法线n,由于主丝杠与滚柱均沿自身螺旋线运动,接触点处的绝对速度方向必然在共切平面内,即与公法线垂直,因此设主丝杠与滚柱螺纹曲面表达式为:
[0042][0043][0044]
式中,u为螺旋法面截型的独立变量,θ是螺旋曲面的旋转角,(u,θ)构成了螺旋曲面,下标s代表主丝杠,r代表滚柱,f
x
为螺旋法截面x分量表达式,f
z’为螺旋法截面z分量表达式,p0为旋转参数,a为中心距,α为螺旋升角。
[0045]
对(1)式和(2)式分别对u和θ求偏导,得到:
[0046][0047]
[0048][0049][0050]
其中,下标s代表主丝杠,r代表滚柱;us为丝杠螺旋法面截型的独立变量,θs为丝杠螺旋曲面的旋转角,r
us
为丝杠曲面矢径对us的偏导矢,r
θs
为丝杠曲面矢径对θs的偏导矢,p
0s
为丝杠旋转参数,αs为丝杠螺旋升角;f
xs
(us)为丝杠螺旋法截面x分量表达式,f
z's
(us)为丝杠螺旋法截面z分量表达式,f
xs
'(us)为丝杠螺旋法截面x分量表达式关于us的导数,f
z's
'(us)为丝杠螺旋法截面z分量表达式关于us的导数。
[0051]
ur为滚柱螺旋法面截型的独立变量,θr为滚柱螺旋曲面的旋转角,r
ur
为滚柱曲面矢径对us的偏导矢,r
θr
为滚柱曲面矢径对θr的偏导矢,p
0r
为滚柱旋转参数,αr为滚柱螺旋升角;f
xr
(ur)为滚柱螺旋法截面x分量表达式,f
z'r
(ur)为滚柱螺旋法截面z分量表达式,f
xr
'(ur)为滚柱螺旋法截面x分量表达式关于ur的导数,f
z'r
'(ur)为滚柱螺旋法截面z分量表达式关于ur的导数。
[0052]
则公法线n可表达为:
[0053][0054]
2、分别求出主丝杠和滚柱沿接触点所在螺旋线的瞬时线速度v
s1
与v
r1
,设主丝杠角速度为ωs,滚柱角速度为ωr,则:
[0055]vs1
=r
θs
·
ωs[0056]vr1
=rθr·
ωr;
[0057]
滚柱除自转以外还会绕主丝杠轴线进行公转,且受到内齿圈与滚柱的齿轮啮合约束,使自转与公转的角速度之比为4:1,设滚柱公转角速度为ωe,则ωr=4ωe,滚柱公转时的瞬时线速度v
r2
为:
[0058]vr2
=ωe·
a;
[0059]
因此,主丝杠与滚柱在接触点处的相对运动速度v为:
[0060]
v=v
s1-v
r1-v
r2
[0061]
=r
θs
·
ω
s-r
θr
·
ω
r-ωe·
a;
[0062]
结合所测量数据,即可计算v的大小与方向。
[0063]
3、将内齿圈8-3去除后,由于在接触位置存在滑擦现象,使滚柱自转与公转的角速度不再维持固定比值,从而导致丝杠副导程发生变化。在之前的测试中,可记录导轨上光栅尺9的数值,与去除内齿圈8-3后的测试进行对比,即可得到丝杠副的滑擦比。同时按上述方法计算相对运动速度,即可得到齿轮约束对相对运动速度的影响程度。
[0064]
本发明直接测量相对转速,相对运动速度大小与方向相对准确;本发明通过改变结构实现增减齿轮传动,且不引入外来变量。
[0065]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域
技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1