数字全息计量系统的制作方法
1.本公开涉及精密计量,并且更具体地涉及精密工件表面测量装置和系统。
背景技术:
2.包括特定表面轮廓(例如,通过模制和/或机械加工等生产)的物体(例如,工件)的质量控制在吞吐量、测量分辨率和精度方面的要求越来越高。此类工件可包括但不限于光学组件、电子组件、微型机械组件等。理想地,应该测量/检查此类工件以确保适当的尺寸、功能等。然而,可能需要亚微米级,或者甚至亚纳米级的测量公差,以确认工件表面具有某些应用期望特征。
3.各种精密计量系统可用于工件表面测量和检查。例如,在一些情况下,执行此类操作的计量系统可利用数字全息术(例如,可利用照相机来获取被处理的全息图以确定测量值等)。此类系统和/或其它可比较的测量系统的重要部分是用于照射正被测量的工件的光源(例如,光源不准确或不一致可能导致测量不准确等)。此类系统的信噪比也是重要的因素(例如,较低的比率可能导致测量不太准确)。可改进或以其它方式增强此类计量系统(例如,用于测量和检查工件的表面等)的配置将是合乎需要的。
技术实现要素:
4.提供本发明内容是为了以简化形式引入在下文的具体实施方式中进一步描述的概念的选择。本发明内容并非旨在标识要求保护的主题的关键特征,也并非旨在用于帮助确定所要求保护的主题的范围。
5.本发明提供了一种数字全息计量系统,其包括外差光源、干涉光学装置和传感器装置。外差光源包括多波长光源和声光调制器。多波长光源(例如,多波长激光光源)至少提供第一频率的第一波长激光光束和不同于第一频率的第二频率的第二波长激光光束。声光调制器被配置成接收第一波长激光光束并生成对应的第一频移激光光束,该对应的第一频移激光光束与第一波长激光光束组合为第一组合光束。声光调制器还被配置成接收第二波长激光光束并生成对应的第二频移激光光束,该对应的第二频移激光光束与第二波长激光光束组合为第二组合光束(例如,该第二组合光束和第一组合光束可以是来自外差光源的总组合光束的部分)。
6.干涉光学装置从外差光源接收组合光束,并利用组合光束来提供用于对工件成像的输出。在各种实施方案中,干涉光学装置的输出至少包括基于来自外差光源的第一组合光束而产生的第一干涉光束,以及基于来自外差光源的第二组合光束而产生的第二干涉光束。传感器装置从干涉光学装置接收输出,并且至少包括第一和第二飞行时间传感器以及第一二向色组件。第一二向色组件被配置成将第一干涉光束与第二干涉光束分离,该第一干涉光束被引导为由第一飞行时间传感器接收并且第二干涉光束被引导为由第二飞行时间传感器接收。在各种实施方案中,数字全息计量系统进一步包括处理部分,该处理部分从第一和第二飞行时间传感器接收输出,并利用该输出来确定到工件上的至少一个表面点的
至少一个测量距离。
7.在各种实施方案中,多波长光源进一步提供不同于第一和第二频率的第三频率的第三波长激光光束。在此类实施方案中,声光调制器可进一步被配置成接收第三波长激光光束并生成对应的第三频移激光光束,该对应的第三频移激光光束与第三波长激光光束组合为第三组合光束。干涉光学装置的输出可进一步包含基于来自外差光源的第三组合光束产生的对应第三干涉光束。传感器装置可进一步包含第三飞行时间传感器和第二二向色组件,其中该第二二向色组件被配置成将第二干涉光束与第三干涉光束分离,该第二干涉光束被引导为由第二飞行时间传感器接收,并且该第三干涉光束被引导为由第三飞行时间传感器接收。
8.在各种实施方案中,干涉光学装置包含分束器、参考表面和包含成像透镜的成像透镜部分。分束器从外差光源接收组合光束,并将组合光束分成被引导至工件表面的第一部分和被引导至参考表面的第二部分。反射的第一部分和反射的第二部分被分束器接收回来,并且被组合和引导为干涉光束通过成像透镜朝向传感器装置。
9.在各种实施方案中,数字全息计量系统进一步包括定时器。定时器提供用于操作声光调制器的到外差光源的信号(例如,例如时钟信号的定时信号),并提供到飞行时间传感器的信号。在各种实施方案中,定时器可被包括作为飞行时间传感器之一的部分。
10.在各种实施方案中,数字全息计量系统被配置成在数字全息模式和调幅连续波(“amcw”)模式下操作。在数字全息模式中,定时器被联接用于操作声光调制器,该声光调制器生成第一和第二组合光束,处理部分从第一和第二飞行时间传感器接收输出,并利用该输出来确定第一数字全息模式测量距离(例如,到工件上的第一表面点)。在amcw模式中,声光调制器不生成第一和第二组合光束,并且处理部分利用飞行时间传感器中的至少一个的输出经由零差检测来确定第一amcw模式测量距离(例如,到工件上的第一表面点)。在各种实施方案中,第一amcw模式测量距离和第一数字全息模式测量距离的至少部分被组合以确定组合的测量距离(例如,到工件上的第一表面点)。
11.在各种实施方案中,数字全息模式的数字全息非模糊范围(例如,绝对测量范围)大于amcw模式的潜在距离误差,并且第一amcw模式测量距离提供数字全息非模糊范围的整数倍,该整数倍与第一数字全息模式测量距离组合以确定到工件上的第一表面点的组合测量距离。在各种实施方案中,amcw模式具有比数字全息模式的非模糊范围大至少50倍的非模糊范围。在各种实施方案中,amcw模式具有大于500毫米的非模糊范围,并且数字全息模式(例如,当利用来自光源的第一、第二和第三波长激光光束时)具有大于5毫米的非模糊范围。
12.在各种实施方案中,第一波长激光光束的第一波长和第二波长激光光束的第二波长之间的差大于第一波长的2%。在各种实施方案中,第一波长激光光束的第一波长和第二波长激光光束的第二波长之间的差大于10纳米。
13.提供了一种操作数字全息计量系统的方法,该方法包括操作数字全息计量系统的外差光源和操作传感器装置。外差光源的操作包括操作多波长光源和操作声光调制器。操作多波长光源以至少提供第一频率的第一波长激光光束和不同于第一频率的第二频率的第二波长激光光束。操作声光调制器以接收第一波长激光光束并生成对应的第一频移激光光束,该对应的第一频移激光光束与第一波长激光光束组合为第一组合光束。进一步操作
声光调制器以接收第二波长激光光束并生成对应的第二频移激光光束,该对应的第二频移激光光束与第二波长激光光束组合为第二组合光束。干涉光学装置从外差光源接收组合光束并利用组合光束来提供用于对工件成像的输出。干涉光学装置的输出至少包括基于来自外差光源的第一组合光束而产生的第一干涉光束以及基于来自外差光源的第二组合光束而产生的第二干涉光束。操作传感器装置以从干涉光学装置接收输出。该传感器装置至少包括第一和第二飞行时间传感器以及第一二向色组件。第一二向色组件被配置成将第一干涉光束与第二干涉光束分离,该第一干涉光束被引导为由第一飞行时间传感器接收并且第二干涉光束被引导为由第二飞行时间传感器接收。在各种实施方案中,该方法进一步包括从第一和第二飞行时间传感器接收输出,并利用该输出来确定到工件上的至少一个表面点的至少一个测量距离。
14.在各种实施方案中,该方法进一步包括操作多波长光源以进一步提供不同于第一和第二频率的第三频率的第三波长激光光束。在此类实施方案中,可操作声光调制器以进一步接收第三波长激光光束并生成对应的第三频移激光光束,该对应的第三频移激光光束与第三波长激光光束组合为第三组合光束。干涉光学装置的输出可对应地进一步包含基于来自外差光源的第三组合光束产生的第三干涉光束。传感器装置可进一步包括第三飞行时间传感器和第二二向色组件。第二二向色组件可被配置成将第二干涉光束与第三干涉光束分离,该第二干涉光束被引导为由第二飞行时间传感器接收并且第三干涉光束被引导为由第三飞行时间传感器接收。
15.在各种实施方案中,该方法可进一步包括操作定时器以提供用于操作声光调制器的到外差光源的信号(例如,例如时钟信号等的定时信号),并提供到飞行时间传感器的信号。在各种实施方案中,该方法可进一步包括在数字全息模式和调幅连续波(“amcw”)模式下操作系统。在数字全息模式中,定时器被联接用于操作声光调制器,该声光调制器生成第一和第二组合光束,并且该处理部分从第一和第二飞行时间传感器接收输出,并利用该输出来确定到工件上的第一表面点的第一数字全息模式测量距离。在amcw模式中,声光调制器不生成第一和第二组合光束,并且处理部分利用飞行时间传感器中的至少一个的输出经由零差检测来确定到工件上的第一表面点的第一amcw模式测量距离。在各种实施方案中,第一amcw模式测量距离和第一数字全息模式测量距离的至少部分被组合以确定到工件上的第一表面点的组合测量距离。在各种实施方案中,数字全息模式的数字全息非模糊范围大于amcw模式的潜在距离误差,并且第一amcw模式测量距离提供数字全息非模糊范围的整数倍,该整数倍与第一数字全息模式测量距离组合以确定到工件上的第一表面点的组合测量距离。
16.在各种实施方案中,提供了一种用于数字全息计量系统的传感器装置。该传感器装置至少包括第一飞行时间传感器、第二飞行时间传感器和第一二向色组件。传感器装置可从干涉光学装置接收输出,该第一二向色组件被配置成将第一干涉光束与第二干涉光束分离,并且该第一干涉光束被引导为由第一飞行时间传感器接收并且第二干涉光束被引导为由第二飞行时间传感器接收。在各种实施方案中,传感器装置可进一步包括第三飞行时间传感器和第二二向色组件。第二二向色组件被配置成将第二干涉光束与第三干涉光束分离,该第二干涉光束被引导为由第二飞行时间传感器接收并且第三干涉光束被引导为由第三飞行时间传感器接收。
附图说明
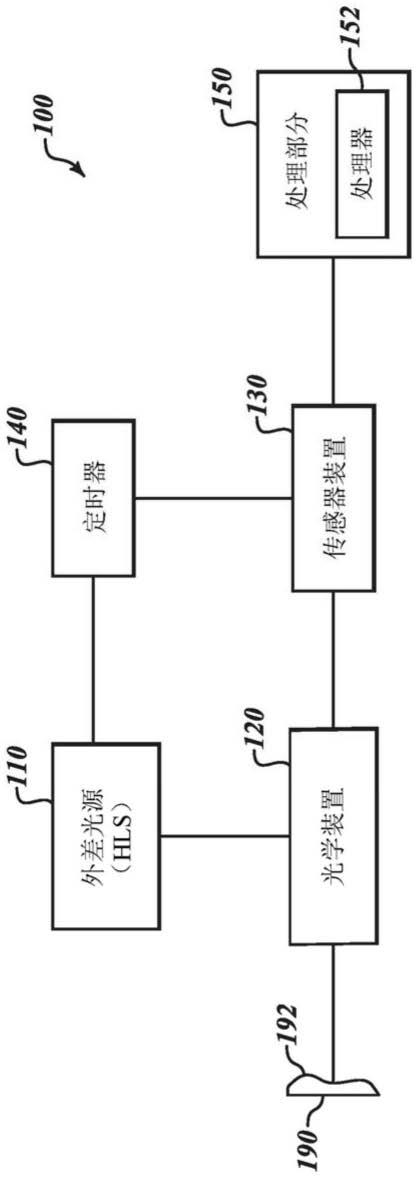
17.图1是示出包括外差光源的计量系统的各个组件的框图;
18.图2是包括类似于图1的外差光源的数字全息计量系统的框图;
19.图3a至3c是绘示例如图2的数字全息计量系统的某些操作原理的示意图;
20.图4是用于作为数字全息计量系统的操作的部分的相位展开的查找表的示意图;
21.图5是图解绘示来自图4的查找表的某些值的示意图;
22.图6a和6b是绘示数字全息计量系统的不同操作模式的示意图;
23.图7是包括具有单个成像透镜和沃拉斯顿棱镜(wollaston prism)的成像系统的外差光源的示意图;
24.图8是包括具有两个成像透镜和沃拉斯顿棱镜的成像系统的外差光源的示意图;
25.图9是包括接收透镜和双折射光束移位器的外差光源的示意图;
26.图10是包括接收棱镜和双折射光束移位器的外差光源的示意图;
27.图11是包括空间滤波配置和准直透镜的外差光源的示意图;
28.图12是绘示用于操作外差光源的例程的示范性实施方案的流程图;以及
29.图13是绘示用于操作包括外差光源的数字全息计量系统的例程的示范性实施方案的流程图。
具体实施方式
30.图1是示出计量系统100的实施方案的各个组件的框图。如图1所示,计量系统100包括外差光源110、光学装置120、传感器装置130、定时器140和处理部分150。在各种实施方案中,外差光源110可包括光源、声光调制器和源光学装置(例如,如下文将关于图7至11的实例更详细地描述的)。简而言之,声光调制器可被配置成从光源接收一个或多个输入波长激光光束并生成一个或多个对应的频移激光光束(例如,其可以是正交偏振的)。源光学装置可接收并组合来自声光调制器的正交偏振激光光束,并输出对应的组合激光光束。
31.光学装置120(例如,其可以是测量光学装置)从外差光源110接收组合输出光束。光学装置120利用(例如,引导)组合光束作为测量过程的部分(例如,作为测量/确定到工件表面192上的至少一个表面点的至少一个测量距离的过程的部分,可将一个或多个光束引导至工件190的表面192)。作为实例,在一些实施方案中(例如,如下文将关于图2更详细地描述的),测量光学装置120可以是干涉光学装置,该干涉光学装置从外差光源110接收组合光束,并利用组合光束来提供用于将工件表面192成像(例如,成像到图像平面)的输出,作为测量过程的部分。
32.传感器装置130从测量光学装置120接收输出,并包括一个或多个用于感测输出并提供对应输出信号的传感器。定时器140提供用于控制外差光源110的声光调制器和传感器装置130的传感器两者的定时等的定时信号(例如时钟信号)。处理部分150(例如,包括一个或多个处理器152)从传感器装置130接收输出并利用该输出(例如,确定到工件190的表面192上的表面点的测量距离)。
33.本领域的技术人员将理解,处理部分150(例如,包括或实施在计算系统等中)和/或所描述的或可与本文描述的元件和方法一起使用的其它处理或控制系统通常可使用任何合适的计算系统或装置来实施,包括分布式或联网计算环境等。此类系统或装置可包括
一个或多个通用或专用处理器(例如,非定制或定制装置),其执行软件以执行本文描述的功能。软件可以存储在存储器中,例如随机存取存储器(ram)、只读存储器(rom)、闪存等,或这些组件的组合。软件也可以存储在一个或多个存储设备中,例如基于光学的磁盘、闪存设备或用于存储数据的任何其他类型的非易失性存储介质。软件可以包括一个或多个程序模块,这些程序模块包括执行特定任务或实现特定抽象数据类型的过程、例程、程序、对象、组件、数据结构等在分布式计算环境中,可跨多个计算系统或装置组合或分发程序模块的功能性,并且以有线或无线配置通过服务调用访问程序模块的功能性。
34.图2是包括外差光源210的数字全息计量系统200的框图,该外差光源在各种实施方案中可执行类似于图1的计量系统的某些功能。应当理解,图2的某些编号的组件2xx可对应于和/或具有与图1的类似编号的配对组件1xx类似的操作,并且可通过与其相似的方式来理解,除非下文另有描述。指示具有相似设计和/或功能(即,除非另外说明和/或描述)的元件的此编号方案也适用于本文的其余附图。如图2所示,数字全息计量系统200包括外差光源210、干涉光学装置220、传感器装置230、定时器240和处理部分250。在各种实施方案中,数字全息计量系统200可作为外差成像干涉仪来操作。
35.在各种实施方案中,外差光源210包括联接到声光调制器(例如,下文将关于图7至11更详细地描述某些实例)的多波长光源(例如,用于提供不同波长的激光光束的多波长激光光源)。在一个实施方案中,多波长激光光源可提供第一频率v1的第一波长激光光束,声光调制器接收第一波长激光光束并生成频率v1+δv的对应的第一频移激光光束,该对应的第一频移激光光束与第一波长激光光束组合为第一组合光束。类似地,多波长激光光源可提供具有不同于第一频率的第二频率v2的第二波长激光光束(即,具有不同于第一波长的对应的第二波长),声光调制器接收第二波长激光光束并生成频率v2+δv的对应的第二频移激光光束,该第二频移激光光束与第二波长激光光束组合为第二组合光束。类似地,多波长激光光源可提供不同于第一和第二频率的第三频率v3的第三波长激光光束(即,具有不同于第一和第二波长的对应的第三波长),声光调制器接收第三波长激光光束并生成频率v3+δv的对应的第三频移激光光束,该对应的第三频移激光光束与第三波长激光光束组合为第三组合光束。在各种实施方案中,多波长激光光源可提供附加波长激光光束,其中声光调制器生成对应的附加频移激光光束。在各种实施方案中,不同符号在本文中可互换地用于表示/对应于激光光束的频率(例如,例如v、f、ω等)。
36.定时器240联接到外差光源210(例如,通过外差光源的驱动器联接到声光调制器)以提供参考时钟信号,基于该参考时钟信号生成调制频率δv。在各种实施方案中,以调制频率δv提供时钟信号(例如,在某些实施方案中,在40mhz至100mhz的范围内)。在各种实施方案中,分布式时钟信号可以等于声光调制器中的声波频率并且等于光束的频移δν(例如,光子频率加上一个声频声子)。在各种替代的实施方案中,分布式时钟信号可以是用附加电子组件倍增/分频到期望的目标频率的任何其它频率。
37.干涉光学装置220(例如,其也可被称为测量光学装置)包括分束器221、四分之一波片223和226、参考镜224(例如,其在本文中也可被称为参考表面224)、成像透镜部分227(例如,包括例如相机透镜的成像透镜)和偏振器228。在各种实施方案中,干涉光学装置220形成和/或操作为双路径干涉仪。提供成像透镜部分227(例如,其在一些实施方案中可包括多个透镜并且可以是远心装置)以将工件190的表面192(例如,正被测量和/或以其它方式
检查等)成像到图像平面。在各种实施方案中,图像平面可在传感器装置230的传感器(例如,传感器tof-1、传感器tof-2等)之前、之上或之后(例如,在各种实施方案中,传感器可在空间上布置成使得从成像透镜部分227到每个传感器的光路长度可以大约相同)。如下文将更详细地描述的,在各种实施方案中每个传感器tof可以以差频δν检测光拍信号并且基于每个像素进行解调。在各种实施方案中,一个深度帧可由四个相位测量组成。所记录的全息图可数字地传播到提取高度图(例如,指示工件190的放大的工件表面192上的表面点的测量)的图像平面(例如,在相位展开之后)。
38.分束器221沿轴222与参考镜224光学对准。分束器221也沿基本上垂直于轴222的轴225与工件表面192光学对准。四分之一波片226设置在分束器221和工件表面192之间,而四分之一波片223设置在分束器221和参考镜224之间,并且成像透镜部分227和偏振器228沿轴225设置在分束器221和传感器装置230之间。成像透镜部分227和偏振器228在分束器221和传感器装置230之间光学对准。
39.待检查/测量的工件190相对于数字全息计量系统200定位,使得工件表面192由成像透镜部分227成像。在某些实施方案中,工件表面192可被成像到传感器装置230的传感器(例如,传感器tof-1、传感器tof-2等)上,但是应当理解,这不是数字全息计量系统中的要求(例如,在各种实施方案中,包括其上的相应表面点的工件表面192可被成像到在传感器装置230的传感器tof之前或之后的图像平面)。
40.在例如本文公开的数字全息计量系统中,无论传感器tof相对于图像平面位于何处,传感器tof对激光光束的测量可数字地传播到图像平面以确定在图像平面处出现的值,并且该值可用于本文描述的测量过程。作为此类数值传播的实例,如果在测量平面(例如,在传感器tof)处测量/确定激光光束的幅度和相位,则由于知道激光光束的幅度和相位如何随时间和距离变化,对应的值可以如在图像平面处发生的那样数值传播(例如,计算)(例如,可根据成像透镜的特性等知道图像平面的相对位置/距离)。此类特征对于测量某些工件/工件特征可能特别有用(例如,工件表面上的高度变化可能足够大,使得整个工件表面可能不适合某些系统的单个测量范围,但是例如本文公开的数字全息计量系统可替代地以数字方式传播到图像平面以获得/确定用于测量的所需值等)。
41.在图2的实例中,通过对应波长激光光束(即,在外差光源210中)的声光调制来获得每个频移激光光束。然而,应当理解,在其它实施方案中,可使用其它技术来获得每个频移激光光束。例如,对于每个波长/频移激光光束对,激光器可以是具有在强轴向磁场中提供的激光介质的塞曼激光器(zeeman laser),以产生具有不同波长/频率的两个激光光束。根据本文使用的术语,即使共享同一个光束路径,具有不同波长/频率的激光光束在一些情况下可以均被称为单独的激光光束。如果激光光束共享光束路径和/或共同传播等,则此类激光光束的组合在某些情况下可称为组合光束。
42.在操作中,定时器240向传感器装置230和外差光源210的驱动器提供时钟或参考信号。外差光源210的声光调制器由驱动器以调制频率δv驱动。如上所述,外差光源210的多波长激光光源生成不同频率的激光光束。例如,如上文提到的,多波长激光光源可提供第一频率v1的第一波长激光光束。声光调制器接收输入的第一波长激光光束并产生/生成沿第一波长激光光束传播的频率为v1+δv的对应第一频移激光光束。结果,相对于第一波长激光光束,外差光源210的输出是第一组合光束。如下文将更详细地描述的,第一组合光束
可由传感器装置230利用以差频δv调制的包络来检测。
43.类似地,外差光源210的多波长激光光源可提供第二频率v2的第二波长激光光束,声光调制器接收输入的第二波长激光光束,并产生/生成频率为v2+δv的对应第二频移激光光束,并且该第二频移激光光束沿第二波长激光光束传播,外差光源210的对应输出是第二组合光束。类似地,多波长激光光源可提供第三频率v3的第三波长激光光束,声光调制器接收输入的第三波长激光光束,并产生/生成频率为v3+δv的对应的第三频移激光光束,并且该对应的第三频移激光光束沿第三波长激光光束传播,外差光源210的对应输出是第三组合光束。应当理解,外差光源210的总输出可因此包括总组合光束(例如,其可包括第一、第二和第三组合光束等)。在各种实施方案中,外差光源210的多波长激光光源可提供附加波长激光光束和声光调制器生成对应的附加频移激光光束以形成对应的附加组合光束,该附加组合光束也可包括在总组合光束中作为来自外差光源210的输出。
44.在各种实施方案中,外差光源210的多波长激光光源在一些情况下可包括用于提供具有不同波长的激光光束的单独激光光源。在各种实施方案中,可能期望此类单独激光光源(例如,激光二极管)具有低温灵敏度。在利用单独激光光源(即,具有相应波长的激光光源)的各种实施方案中,每个激光光源的波长可能由于温度变化等而在相同方向上漂移,波长之间的比率可保持相对稳定,这可以因此导致系统的相对稳定的测量精度。在各种实施方案中,每个单独光源的温度灵敏度可被配置成匹配对应的波长,可以减少或消除由于温度引起的波长比率的任何漂移。当配置例如本文所公开的外差光源210时,在各种实施方案中,可以测试单独激光光源(例如,由于制造公差等,其可具有不同的值),并且可以选择/利用提供波长之间的期望比率的激光光源的组合。
45.因此,在各种实施方案中,可包括提供波长比率的期望组合的不同激光光源(例如,在一个特定实例实施方案中,提供例如633nm、687nm和767nm的波长)。在一个实施方案中,包括在多波长激光光源中的第一激光光源可提供第一波长激光光束(例如,在一个特定实例实施方案中标称波长为633nm)。外差光源210可对应地产生如上所述的第一组合光束,包括具有垂直偏振的第一波长(例如,633nm)的第一波长激光光束和具有水平偏振的波长(例如,每个具有线性偏振)的第一频移激光光束。定时器240产生设定外差光源210的声光调制器的驱动频率的时钟信号(例如,40mhz)。结果,第一组合光束导致检测到的拍频信号(例如,40mhz)。
46.类似地,包括在外差光源210的多波长激光光源中的第二激光光源可提供第二波长激光光束(例如,在一个特定实例实施方案中标称波长为687nm)。外差光源210可对应地产生如上所述的第二组合光束,包括具有垂直偏振的第二波长(例如687nm)的第二波长激光光束和具有水平偏振的波长的第二频移激光光束。类似地,包括在多波长激光光源中的第三激光光源可提供第三波长激光光束(例如,在一个特定实例实施方案中标称波长为767nm)。外差光源210可对应地产生如上所述的第三组合光束,包括具有垂直偏振的第三波长(例如767nm)的第三波长激光光束和具有水平偏振的波长的第三频移激光光束。如上文提到的,定时器240可以产生设定外差光源210的声光调制器的驱动频率的时钟信号(例如,40mhz)。结果,第二和第三组合光束中的每一个以调制频率(例如,40mhz)生成检测到的拍频信号。
47.如上文提到的,在数字全息计量系统200的操作期间,外差光源210将包括组合光束的总组合光束输出到干涉光学装置220。如下文将更详细地描述,干涉光学装置220利用组合光束来提供用于使工件190的表面192成像(例如,成像到图像平面)的输出。例如,如下文将更详地细描述的,在使用三个波长的一个实例实施方案中,干涉光学装置220的输出可包括第一、第二和第三干涉光束。在各种实施方案中,基于来自外差光源的第一组合光束产生第一干涉光束,基于来自外差光源的第二组合光束产生第二干涉光束,以及基于来自外差光源的第三组合光束产生第三干涉光束。
48.进一步关于以上实例,在第一组合光束入射到干涉光学装置220的分束器221(例如,偏振分束器)上时,具有频率v1和垂直偏振的第一参考光束沿朝向参考镜224的轴222传播,然而具有频率v1+δv和水平偏振的第一信号光束沿轴225传播以照射工件表面192的部分。第一反射参考光束(即,来自参考镜224)和第一反射信号光束(即,来自工件表面192)然后由分束器221组合,从而形成第一反射组合光束,其经由成像透镜部分227沿朝向传感器装置230的轴222传播。四分之一波片226用于将频率为v1+δv的第一入射光束的偏振从水平变换为圆形,并将第一反射信号光束的偏振从圆形变换为垂直。类似地,四分之一波片223用于将频率为v1的第一入射光束的偏振从垂直变换为圆形,并将第一反射参考光束的偏振从圆形变换为水平。结果,分别在第一和第二四分之一波片之后的第一反射信号光束和第一反射参考光束的偏振是正交的,从而防止了干扰。
49.工件表面192经由成像透镜部分227成像到图像平面,如下文将更详细地描述的。偏振器228用于控制第一两个反射光束的偏振,允许它们形成第一干涉光束。第一二向色组件231-1(例如,用于分离各个波长的二向色滤光器)操作以将第一干涉光束ib-1反射到传感器装置230的传感器tof-1(例如,飞行时间传感器,其在各种实施方案中可以是飞行时间相机等)。如下文将更详细地描述的,第一二向色组件231-1还操作以透射/通过具有不同波长的其它干涉光束,以继续沿轴225被其它二向色组件反射向传感器装置230的其它传感器。在各种实施方案中,如本文所定义的二向色组件可各自包含可将光束分裂成具有不同波长的两个光束的任何光学组件。如上文提到的,工件表面192经由成像透镜部分227成像到图像平面(例如,图像平面可在传感器tof-1之前、之上或之后)。
50.当第二组合光束入射到分束器221上时,具有频率v2和垂直偏振的第二参考光束沿朝向参考镜224的轴222传播,然而具有频率v2+δv和水平偏振的第二信号光束沿轴225传播以照射工件表面192的部分。然后第二反射参考光束和第二反射信号光束被分束器221组合,因此形成第二反射组合光束,其经由成像透镜部分227沿朝向传感器装置230的轴225传播。四分之一波片226用于将频率为v2+δv的第二入射光束的偏振从水平变换为圆形,并将第二反射信号光束的偏振从圆形变换为垂直。类似地,四分之一波片223用于将频率为v2的第二入射光束的偏振从垂直变换为圆形,并将第二反射参考光束的偏振从圆形变换为水平。结果,分别在第一和第二四分之一波片之后的第二反射信号光束和第二反射参考光束的偏振是正交的,从而防止了干扰。
51.工件表面192经由成像透镜部分227成像到图像平面,如下文将更详细地描述的。偏振器228用于控制第二两个反射光束的偏振,允许它们形成第二干涉光束。第二二向色组件231-2操作以将第二干涉光束ib-2朝向传感器装置230的传感器tof-2反射。类似于第一二向色组件231-1在透射/通过第二干涉光束ib-2时如何反射第一干涉光束ib-1,第二二向
色组件231-2还操作以透射/通过具有不同波长的其它干涉光束,以继续沿轴225被其它二向色组件反射向传感器装置230的其它传感器。如上文提到的,工件表面192经由成像透镜部分227成像到图像平面(例如,图像平面可在传感器tof-2之前、之上或之后)。
52.应当理解,对于系统的附加组合光束可能会发生类似的过程。例如,类似于上述过程,可以存在最终组合光束(例如,编号为第n个组合光束),可以存在具有频率vn和垂直偏振的对应最终参考光束以及具有频率vn+δv和水平偏振的最终信号光束。对应的最终反射参考光束和最终反射信号光束可以形成最终反射组合光束,由此可以形成最终干涉光束。工件表面192可经由成像透镜部分227成像到图像平面,如下文将更详细地描述的。最终二向色组件231-n操作以将最终干涉光束ib-n反射向传感器tof-n。如上文提到的,工件表面192经由成像透镜部分227成像到图像平面(例如,图像平面可在传感器tof-n之前、之上或之后)。
53.应当理解,在n=3的实施方案中,最终组合光束可以是第三组合光束,或者在n大于3的实施方案中,还可以存在系统的第三组合光束。在任一情况下,可以存在具有频率v3和垂直偏振的对应的第三参考光束以及具有频率v3+δv和水平偏振的第三信号光束。对应的第三反射参考光束和第三反射信号光束可以形成第三反射组合光束,由此可以形成第三干涉光束。第三二向色组件231-3可操作以将第三干涉光束ib-3朝向传感器tof-3(即,当n=3时的传感器tof-n)反射。应当理解,二向色组件的使用使得能够在外差光源210中使用多波长激光光束,光束在公共光束路径中组合,并且然后由二向色组件分开以由传感器tof接收(例如,作为相关测量功能的部分等)。
54.更具体地,如上文提到的,第一二向色组件231-1被配置成将第一干涉光束ib-1与第二和第三干涉光束ib-2和ib-3分离,第一干涉光束ib-1被引导(例如,通过第一二向色组件231-1)以由第一传感器tof-1(例如,飞行时间传感器)接收。第二二向色组件231-2被配置成将第二干涉光束ib-2与第三干涉光束ib-3分离,第二干涉光束ib-2被引导(例如,通过第二二向色组件231-2)以由第二传感器tof-2(例如,飞行时间传感器)接收。第三干涉光束ib-3被引导(例如,通过第三二向色组件231-3)以由第三传感器tof-3(例如,飞行时间传感器)接收。
55.如上文提到的,外差光源210的总输出可以是总组合光束(例如,其可包括第一、第二和第三组合光束,例如在n=3的上述实例中)。根据如上所述的操作,当来自外差光源210的总组合光束入射到分束器221上时,包括具有相应频率v1、v2和v3以及垂直偏振的第一、第二和第三参考光束的组合参考光束沿朝向参考镜224的轴222传播(例如,参考镜224处的光束组合可以表示为∑vi,其在该实例中指示组合参考光束包括具有频率v1、v2和v3的参考光束。还根据如上所述的操作,进一步在来自外差光源210的总组合光束入射到分束器221上时,包括具有相应频率v1+δv、v2+δv和v3+δv以及水平偏振的第一、第二和第三信号光束的组合信号光束沿轴225传播以照射工件表面192的部分(例如,工件表面192处的光束组合可以表示为∑vi+δv,其在该实例中指示组合信号光束包括具有频率v1+δv、v2+δv和v3+δv)的信号光束。
56.在各种实施方案中,轴225可对应于/被定义为数字全息计量系统200的测量轴,测量距离可对应于从数字全息计量系统200(例如,从数字全息计量系统200的指定组件或参考点,例如靠近或位于四分之一波片226,或者靠近或位于包围干涉光学装置220的外壳的
端部等)到工件表面192上的表面点的距离。在各种实施方案中,轴225还可以或替代地对应于/被定义为数字全息计量系统200的z轴,测量距离可被称为z距离或根据z高度。在各种实施方案中,工件表面192上的表面点的不同z高度(例如,作为整个表面轮廓的部分或以其它方式)可根据其相对z高度相对于参考点和/或彼此相对,例如相对于工件表面上的参考点,该参考点可被指定为具有z=0的z高度。在各种实施方案中,每个表面点的z高度可对应于/根据从数字全息计量系统200到表面点的相应测量距离/z距离来确定。
57.在例如本文所公开的利用二向色组件的那些配置中,在各种实施方案中,可能期望光束的波长被充分分离,使得光束可被二向色有效地分离。相反,某些现有系统已经利用了具有非常接近的波长的光束(例如,具有小于1nm的间隔,例如实现组合的合成波长以实现长的绝对测量范围等)。在如本文所公开的配置中,可替代地有利的是利用具有相对较大间隔(例如,例如最短波长值的至少2%或5%的间隔,或至少10nm或20nm的间隔)的波长的组合,使得基于波长分离的二向色可有效地分离光束。满足此类要求的波长的一个具体实例组合是λ1=633nm、λ2=687nm和λ3=767nm(例如,最短波长的2%小于13nm,并且5%小于32nm,其各自小于最短和最长波长之间的间隔,或者在该实例中的任何波长之间的间隔,如10nm或20nm的间隔)。
58.对于传感器装置230的每个传感器tof(例如,tof-1、tof-2...tof-n),在各种实施方案中,可以是飞行时间传感器,其被配置成确定在每个像素处接收的调制信号和干涉光束之间的相位关系。传感器tof输出信号,该信号将落在每个像素上的光信号的调制强度的相位与来源于定时器240(例如,其可以用作公共时钟源)信号的调制频率的电参考信号进行比较。在各种实施方案中,传感器tof可输出计算相位的正交信号(iq)。在各种实施方案中,可在传感器本身上(例如,在传感器tof上的芯片/处理器上)或在相关联的处理器/芯片上(例如,在处理部分250的传感器电子器件255或主计算机258等中提供的)执行此类计算。通常,处理部分250从传感器装置230的传感器tof(例如,tof-1、tof-2
…
tof-n)接收输出,并利用该输出(例如,确定到工件190的表面192上的表面点的测量距离)。
59.在各种实施方案中,定时器240可以是传感器tof(例如,传感器tof-1)中的至少一个的部分或从其接收定时信号。在此类实施方案中,外差光源210的声光调制器的相位和频率可由传感器tof(即,通过传感器tof的定时器)有效地控制。在各种实施方案中,每个传感器tof可在一个深度帧内执行具有90度偏移的4个相位测量以测量幅度和相位。每个传感器tof上的每个像素可以是组合检测和解调的光子混合器装置。在各种实施方案中,传感器tof可以仅对来自测量信号和参考臂(即,包括参考镜224)的差频敏感。和频项可被平均,并通过相关的双取样与直流(dc)项一起被去除。
60.在各种实施方案中,数字全息计量系统200作为相移全息系统来操作,该相移全息系统基于每个像素来测量工件波和参考波(例如,来自相应的反射信号光束和反射参考光束)之间的相位差。某些现有系统需要计算步骤来从至少3个干涉图计算全息图,而根据本文公开的原理,可至少近似实时地执行计算(例如,在传感器tof上或在处理部分等)。在各种实施方案中,所测量的全息图被数字地传播到图像平面,其中使用相位展开例程来组合来自所有波长的相位信息,以在相对长的非模糊范围(例如,绝对测量范围)内重构表面轮廓。
61.关于传感器tof,应当理解,在各种实施方案中,例如飞行时间相机的飞行时间传
感器可具有非常好的相位分辨率,该相位分辨率可用于实现系统测量的大的非模糊范围(nar)(例如,用于确定到工件上的表面点的绝对测量距离等)。通常,传感器tof的分辨率越好,可实现的非模糊范围(例如,作为可解码的路径等)越长。如本文所定义的,飞行时间传感器是被配置成感测指示激光光束的幅度和相位的值的任何传感器或配置。所使用的波长的比率是关于可实现的非模糊范围的另一重要因素。因此,在各种实施方案中,对于给定的系统,期望确定/利用波长比率,该波长比率导致可以以能够实现大的非模糊范围的方式解包/解码信号。
62.图3a至3c是绘示类似于图2的数字全息计量系统200的数字全息计量系统300的某些操作原理的示意图。在图3a至3c中仅绘示了数字全息计量系统300的某些部分,为了简化相关操作原理的描述。应当理解,图3a至3c的某些编号的组件3xx可对应于和/或具有与图1的类似编号的配对组件1xx或图2的类似编号的配对组件2xx类似的操作,并且可以通过与其相似的方式来理解,除非下文另有描述。如图3a所绘示的,外差光源310的输出由干涉光学装置320接收。对应地,干涉光学装置320的输出由传感器装置330接收。
63.类似于上文关于图2描述的操作,外差光源330可提供由在一个偏振中具有多个基频的准直光束和在正交偏振状态中的所有频移组件组成的输出(例如,作为包括第一组合光束、第二组合光束、第三组合光束等的总组合准直光束提供)。在第一组合光束入射到干涉光学装置320的分束器321(例如,偏振分束器)上时,具有频率f1的第一信号光束传播以照射工件表面192的部分,而具有正交偏振和频率f1+δf的第一参考光束朝向参考表面324(例如,参考镜)传播。应当理解,在该实例中用于信号光束和参考光束的光束相对于在上文关于图2描述的实例中使用的光束被切换,在各种实施方案中可使用任一配置。然后第一反射信号光束和第一反射参考光束由分束器321组合,因此形成朝向传感器装置330传播的第一反射组合光束。
64.当第二组合光束入射到分束器321上时,具有频率f2的第二信号光束传播以照射工件表面192的部分,而具有正交偏振和频率f2+δf的第二参考光束朝向参考表面324传播。然后第二反射信号光束和第二反射参考光束由分束器321组合,因此形成朝向传感器装置330传播的第二反射组合光束。类似的过程发生在第三组合光束入射到分束器321等上时。在各种实施方案中,可以执行这种类型的过程用于测量工件表面192上的参考点rp(例如,其可被指定为z=0或其它z高度)并且随后用于测量工件表面上的其它表面点sp,如下文将关于图3b更详细地描述的。
65.类似于上述过程,外差光源310的总输出可以是总组合光束(例如,在n=3的实例中,其可包括第一、第二和第三组合光束)。根据如上所述的操作,在来自外差光源310的总组合光束入射到分束器321上时,包括具有相应频率f1、f2和f3以及垂直偏振的第一、第二和第三信号光束的组合信号光束沿轴传播以照射工件表面192的部分(例如,工件表面192处的光束组合可以表示为∑fi),其在该实例中指示组合信号光束包括具有频率f1、f2和f3的信号光束。还根据如上所述的操作,进一步在来自外差光源310的总组合光束入射到分束器321上时,包括具有相应频率f1+δf、f2+δf和f3+δf以及水平偏振的第一、第二和第三参考光束的组合参考光束沿朝向参考表面324的轴传播(例如,参考表面324处的光束组合可以表示为∑fi+δf,在该实例中指示组合参考光束包括具有频率f1+δf、f2+δf和f3+δf的参考光束。
66.图3b绘示了与上述过程相关的各种实例信号,包括第一组实例信号380-1和第二组实例信号380-2。第一组实例信号380-1包括第一参考光束信号r131(例如,具有频率f1+δf)、第一信号光束信号sb1(例如,具有频率f1)、第一组合光束信号cb1(例如,以拍频δf调制)和第一组合光束相移信号cbps1(例如,以拍频δf调制,具有由路径长度差2δz导致的附加相移)。在各种实施方案中,第一组合光束信号cb1可由测量工件表面上的参考点(例如,图3a中的参考点rp)导致。第一组合光束相移信号cbps1可由随后测量工件表面上的不同表面点(例如,图3a中的表面点sp)导致。如图3b所指示的,信号cb1和bcps1之间的差对应于第一相移其中c对应于光的速度。
67.第二组实例信号380-2包括第二参考光束信号rb2(例如,具有频率f2+δf)、第二信号光束信号sb2(例如,具有频率f2)、第二组合光束信号cb2(例如,以拍频δf调制)和第二组合光束相移信号cbps2(例如,以拍频δf调制,具有由路径长度差2δz导致的附加相移)。在各种实施方案中,第二组合光束信号cb2可由测量工件表面上的参考点(例如,图3a中的参考点rp)导致。第二组合光束相移信号cbps2可由随后测量工件表面上的表面点(例如,图3a中的表面点sp)导致。如图3b所指示的,信号cb2和bcps2之间的差对应于第二相移其中c对应于光的速度。应当理解,可利用用于确定第三相移等的第三组合光束来执行类似的过程。
68.图3c绘示了与图3b所指示的相移处理相关的数字全息计量系统300的某些组件。如图3c所示,传感器装置330包括传感器tof-1、tof-2和tof-3,每个传感器包括相应的像素阵列335-1、335-2和335-3。在每个像素阵列中,相应的像素336-1、336-2和336-3被指示为用于测量工件表面192上的特定表面点(例如,如图3a所示的表面点sp)。在各种实施方案中,处理部分350可以接收(例如,在传感器电子器件355处)关于相移等的数据(例如,如上文所描述的)。然后处理部分350(例如,利用计算机358)可以执行相位展开(例如,基于相移等来确定δz的值)。在各种实施方案中,确定δz的值对应于确定到工件190的表面192上的表面点(例如,表面点sp)的测量距离。下面关于图4和5更详细地描述利用查找表来执行相位展开(例如,用于确定δz)的简化实例。
69.图4是用于作为数字全息计量系统的操作的部分的相位展开的查找表400的示意图。在图4的实例中,第一列对应于第一传感器tof-1,其接收对应于具有第一波长λ1(例如,其中λ1=500nm)的第一波长激光光束的信号,第一列包括对应于不同的可能相位的值(例如,图4的相位可对应于如上关于图3a至3c所述的相移)。在图4中,第二列对应于第二传感器tof-2,其接收对应于具有第二波长λ2(例如,其中λ2=800nm)的第二波长激光光束的信号,第二列包括对应于不同的可能相位的值。第三列对应于第三传感器tof-3,其接收对应于具有第三波长λ3(例如,其中λ3=1000nm)的第三波长激光光束的信号,第三列包括对应于不同的可能相位的值。作为使用查找表400的具体实例,如果相位分别具有对应于216度、90度和288度的值,则可以看出此类值对应于δz=0.9微米的测量表面点sp的表面高度δz(例如,相对于图3a所示的工件表面上的参考点rp的高度)。表400的第四列中的值被示出以0.1微米的步长在从表面高度δz=0到δz=2.0微米的范围内延伸(对于2.0微米的总非模糊范围)。此类关系在图5中进一步示出,如下文将更
详细地描述的。
70.图5是图解说明来自图4的查找表的某些值的示意图。图5包括三个曲线图500a、500b和500c,在每个曲线图的y轴上指示了相位值的周期,并且相对于在曲线图500a的顶部沿x轴包括的表面高度尺度来绘制(并且在每个曲线图的底部x轴上还指示了对应于每个0.1微米步长的每个所指示的表面高度的相位值)。如图5所示,曲线图500a绘示了对应于具有第一波长λ1(即,其中λ1=500nm)的激光光束的第一相位的值,并且该值示出为循环通过8个周期。曲线图500b绘示了对应于具有第二波长λ2(即,其中λ2=800nm)的激光光束的第二相位的值,并且该值示出为循环通过5个周期。曲线图500c绘示了对应于具有第三波长λ3(即,其中λ3=1000nm)的激光光束的第三相位的值,并且该的值示出为循环通过4个周期。
71.如图5所示,表面高度δz值不仅取决于每个相位值,而且取决于每个相位值落入的周期。作为一个实例,对于如上文提到的表面高度δz=0.9微米,相位度并且落入对应波形的第四周期,相位度并且落入对应波形的第三周期,并且相位度并且落入对应波形的第二周期内。因此,相位展开过程确定了对应于相位值的唯一组合的唯一表面高度δz(即,并且其根据图5的图形说明来指示相位值中的每一个落入的周期)。
72.在图4和图5的实例中,选择波长λ1=500nm、λ2=800nm和λ3=1000nm是为了简化说明如上所述的操作原理,并且在该实例中导致2.0微米的非模糊范围。根据本文公开的原理,可以选择和利用其它波长组合(例如,其可以导致更长的非模糊范围)。例如,波长λ1=633nm、λ2=687nm和λ3=767nm的组合,其可利用某些商业上可获得的激光光源来实现,在某些实施方案中,可以导致在大约8.82mm的非模糊范围。在各种实施方案中,可以基于相位测量的精确程度(例如,根据信噪比率等)来选择/利用对应的δz步长。
73.在各种实施方案中,可利用各种类型的相位展开例程(例如,用于基于相位值的唯一组合来确定表面高度δz值)。例如,作为例如上文关于图4和5描述的查找表的替代或补充,可将机器学习过程用于相位展开。作为利用机器学习的此类相位展开的实例,可在用于机器学习的数据上训练k最近邻(knn)回归量。此类处理的有效性已经通过在没有任何噪声的干净数据上训练knn回归量,然后使用它来证明相对于相对噪声数据执行的相位展开来确定。此类测试已经证实,这些过程(例如,包括利用用于相位展开的机器学习,例如利用knn模型)导致用于确定测量的高精度。
74.应当理解,例如本文所公开的数字全息计量系统(例如,具有使用飞行时间相机作为传感器的外差检测)可具有优于某些现有计量系统的各种优点。所利用的外差检测能够在全息术中实现高信噪比率,其被利用来增加非模糊范围(nar)以及所执行的测量的精度。此外,使用不依赖于合成波长的相位展开例程来实现长的非模糊范围(例如,绝对测量范围)。执行波长多路复用(例如,可以通过利用二向色来实现,该二向色可在商业上以相对低的成本获得,并且可用于分离具有单独波长的信号光束)。可利用波长多路复用使用多个tof相机,在一个深度帧内相对同时地捕获所有波长的所有相位以提高环境鲁棒性。
75.测量数据的此类快速采集有助于确保在捕获测量数据的同时在工件和系统之间存在最小的移动或没有移动(例如,与其中图像和/或数据被单独地或以其它方式顺序地捕获的现有系统相反,因此花费更多时间并且潜在地允许工件相对于系统移动,例如由于振
动、意外移动、工件的正常行进等)。与现有系统相比,通过直接测量相位来减少计算工作量,而不需要相位检索例程。本文所公开的配置在一些实施方案中可利用三个不同的波长来实现与利用六个不同波长的现有多波长系统类似的性能,并且因此可以导致类似性能的较低成本。在各种实施方案中,例如本文所公开的那些的配置可用于例如高吞吐量内联计量采样/测量等的应用。
76.图6a和6b是绘示例如本文所公开的数字全息计量系统600的不同操作模式的示意图。数字全息计量系统600类似于图2和3a至3c的数字全息计量系统200和300,除非下文另有描述。在图6a和6b中仅绘示了数字全息计量系统600的某些部分,为了简单起见,为了简化不同模式的相关操作原理的描述。如图6a和6b所示,数字全息计量系统600包括外差光源610、干涉光学装置620、传感器装置630、定时器640和处理部分650。外差光源610包括多波长激光光源611和声光调制器(aom)612(例如,类似组件被描述为包括在图2的外差光源210中)。与图2的数字全息计量系统200的一个不同之处在于,数字全息计量系统600包括用于在不同模式之间切换的开关619(例如,包括在外差光源610中或其它),如将在下文更详细地描述的。
77.图6a绘示了在调幅连续波(amcw)模式601a下操作的数字全息计量系统600,而图6b绘示了在数字全息模式601b下操作的数字全息计量系统600(例如,开关619被用作模式之间切换的部分)。如下文将更详细地描述的,amcw模式601a可被表征为提供相对粗略的尺度测量(例如,利用一个或多个传感器tof以执行某些飞行时间测量操作),而数字全息模式601b(例如,其可以如上面关于图2和3a至3c描述的操作)可被表征为提供相对精细的尺度测量,为此,可以组合两种模式的测量以在相对大的非模糊范围内提供高精度测量。
78.如图6a所示,对于amcw模式601a,开关619将定时器640(例如,其提供时钟信号)联接到多波长激光光源611(例如,联接到多波长激光光源611的电流源)以调制光的强度。声光调制器612不从定时器640接收时钟信号并且在各种实施方案中保持关闭。来自多波长激光光源611的光因此穿过声光调制器612(例如,作为零级光)。应当理解,根据该实例中的操作,没有参考光束被分束器621朝向参考镜624引导。而是,穿过声光调制器612的零级光穿过分束器621并照射工件190的表面192,该工件的表面根据反射光由光学装置620成像(例如,如分束器621所引导朝向传感器装置630)。传感器装置630的一个或多个传感器tof(例如,参见图2)经由零差检测来测量工件表面192上的表面点的距离/表面高度。根据一个或多个传感器tof的此类操作,可以实现相对粗略的测量范围(例如,在一个特定实例实施方案中包括大约1.5米的非模糊范围,在对应于大约7.5mm的此类距离处具有大约0.5%的潜在距离误差)。
79.因此,amcw模式601a的此类操作有效地提供了粗略尺度测量,可利用图6b的数字全息模式601b来提供精细尺度测量,该精细尺度测量可以解决图6a的粗略尺度测量的潜在距离误差,例如具有大于潜在距离误差的非模糊范围(例如,在该实例中大于7.5mm的非模糊范围)。对于数字全息模式601b,开关619将定时器640联接到声光调制器612,其被接通,并且数字全息计量系统600如上面关于图2和3a至3c所描述的那样操作。在各种实施方案中,数字全息计量系统600可在逐帧的基础上在模式601a和601b之间交替,以实现期望的测量。
80.如上文提到的,在图2的配置的一个特定实例实施方案中(即,图6b的配置类似地
操作),利用波长λ1=633nm、λ2=687nm和λ3=767nm的组合(其可利用某些商业上可获得的激光光源来实现),在某些实施方案中,可以导致大约8.82mm的非模糊范围。注意到这大于在上述实例中用于amcw模式601a的粗略尺度测量的7.5mm潜在误差。因此,可以组合这些实例中的两种模式的测量,以实现具有亚微米精度的大约1.5米的总非模糊范围。应当理解,利用两种模式601a和601b使得总非模糊范围能够被扩展(例如,扩展到1.5米),而不需要添加额外的激光光源。在一个具体实例中,为了仅利用例如模式601b的数字全息模式实现非模糊范围的类似增加,可能需要额外的激光光源(例如,例如添加三个额外的激光光源,例如对于波长λ1、λ2、λ3、λ4、λ5和λ6的总共六个激光光源)。与此类替代配置相比,如图6a和6b所示的两种模式601a和601b的使用可以导致不太复杂和成本较低的系统(例如,利用和实施仅来自三个激光光源/波长λ1、λ2、λ3而不是六个等的测量)。
81.在各种实施方案中,可利用不同的技术来组合amcw模式601a和数字全息模式601b的测量。如上文提到的,在各种实施方案中,amcw模式601a以更粗略的尺度提供表面高度数据,并且在一些情况下可以主要用于解决展开超出原始全息范围的模糊性。在一个具体实例实施方案中,α=数字全息模式601b中的测量的非模糊范围,而z_amcw=amcw模式601a的表面高度测量,并且z_holo=数字全息模式601b的全息z高度测量。项i=floor(z_amcw/α)提供数字全息模式601b的数字全息非模糊范围的整数倍(例如,期望所测量的高度在amcw模式601a的非模糊范围内)。如上文提到的,在一个特定实例实施方案中,100mhz的调制频率可对应于1.5米的amcw非模糊范围,数字全息非模糊范围可以大于潜在的距离误差(例如,在该实例中大于7.5mm的非模糊范围)。最终z高度可以通过δz=i
·
α+z_holo来确定。根据该等式,在用于确定到工件上的第一表面点的组合测量距离的一个实例中,第一amcw模式测量距离提供数字全息非模糊范围的整数倍,该整数倍与第一数字全息模式测量距离组合以确定到工件上的第一表面点的组合测量距离。
82.图7至11绘示了外差光源(例如,其可用作图1的外差光源110和/或图2的外差光源210等)的各种实施方案。在各种实施方案中,图7至10的配置中的每一个可被表征为用于共同传播和交叉偏振的光束(例如,来自用于外差干涉的声光调制器等)的内联光学装置。更具体地,这些实施方案中的每一个可被表征为用于将正交偏振的输出光束(例如,来自声光调制器)组合成单个光束以用作外差光源的输出的内联光学装置。在本文所公开的内联光学装置中,正交偏振光束被注意到各自穿过源光学装置的同一组组件,其中双折射光学元件部分(即,包括双折射光学元件)将正交偏振的输出光束组合到单个光束路径中作为单个组合光束的部分。
83.应当理解,下文描述的实施方案可具有优于某些替代实施方案的优点。举例来说,在一个替代实施方案中,可利用光纤联接(例如,声光调制器的输出可由透镜聚焦到光纤(例如,保偏光纤)中)。然而,由于以下组合,此类配置可能具有高联接损耗:导致削波的焦平面中的光束偏移;光束尺寸/模场直径失配;和/或有限的光纤输入数值孔径(na)。在另一替代实施方案中,可利用两个偏振分束器及反射器,来自声光调制器的第一光束可由第一分束器向上引导以由第一反射器反射到第二反射器,该第二反射器将第一光束向下反射回第二分束器,该第二分束器将第一光束向前引导,并且来自声光调制器的第二光束直线穿过第一和第二分束器以与第一光束共同传播出配置。然而,此类配置可能由于不相等的路径长度(即,第一和第二光束)而具有失配的光束参数,以及不具有共同的光束路径(即,穿
过不同的光学元件),这可能导致缺乏鲁棒性。应当理解,下文关于图7至11描述的实施方案具有优于此类配置的某些优点。
84.图7是外差光源710的示意图,该外差光源包括激光光源711、声光调制器712、驱动器713和源光学装置718(即,其包括接收光学元件部分714p和双折射光学元件部分715p)。接收光学元件部分714p包括具有单个成像透镜714的成像系统。双折射光学元件部分715p包括沃拉斯顿棱镜715。
85.在操作中,定时器(例如,定时器140、定时器240等)可以向驱动器713提供定时信号(例如,时钟/参考信号)。然后由驱动器713以调制频率δω驱动声光调制器712。激光光源711可提供第一频率ω1(即,具有对应的第一波长)的第一波长激光光束。声光调制器712(例如,剪切波aom)接收输入的第一波长激光光束并以频率ω1+δω产生/生成对应的第一频移激光光束,该对应的第一频移激光光束相对于输入的第一波长激光光束正交偏振。声光调制器712中的物平面由成像透镜714以与声光调制器712的分离角α和沃拉斯顿棱镜715的分离角β两者匹配的放大率m成像到沃拉斯顿棱镜715中,其中m=tan(α)/tan(β)。根据沃拉斯顿棱镜715的操作特征,输出是第一组合光束,其包括第一频率ω1的组合第一波长激光光束和频率ω1+δω的正交偏振的第一频移激光光束。
86.外差光源710的组件(例如,包括成像透镜714和沃拉斯顿棱镜715)因此可被表征为用于共同传播和交叉偏振光束的内联光学装置。更具体地,这些组件可被表征为用于将正交偏振的输出光束组合成来自外差光源输出的单个光束的内联光学装置。如图7所指示的,外差光源710的输出可提供给测量光学装置moa(例如,测量光学装置120、220等)/由测量光学装置moa接收,例如用于测量操作(例如,用于基于利用第一组合光束的测量过程确定到工件上的至少一个表面点的至少一个测量距离)。
87.图8是外差光源810的示意图,该外差光源包括激光光源811、声光调制器812、驱动器813和源光学装置818(即,其包括接收光学元件部分814p和双折射光学元件部分815p)。接收光学元件部分814p包括具有两个成像透镜814a和814b的成像系统。双折射光学元件部分815p包括沃拉斯顿棱镜815。外差光源810以及图9、10和11的外差光源910、1010和1110将被理解为与图7的外差光源710类似地操作,除非下文另有描述。关于具有带单个成像透镜714的成像系统的图7的外差光源710,图8的外差光源810的主要差别在于包括带有多个透镜814a和814b的成像系统,这可以为某些应用提供某些期望的操作特征,如下文将更详细地描述的。
88.在激光光源811可以是多波长激光光源的实施方案中,声光调制器812的衍射角α可以取决于波长,在例如图7的配置中,在一些实施方案中带有不同波长的光束可能因此不会共同传播(例如,这可能导致稍后在该配置中的光束削波等)。为了解决此类问题,成像系统(即,包括透镜814a和814b)可被配置成色度成像系统,放大率可以取决于波长,并且可以与声光调制器812的衍射角α(即,对于每个波长)匹配(例如,使得不同波长的激光光束将共同传播和/或以其它方式在该配置中稍后不经历光束削波等)。更具体地,根据该配置,声光调制器812中的物平面由色度成像系统(即,包括成像透镜814a和814b)以放大率m成像到沃拉斯顿棱镜815中,该放大率随每个波长而变化,并且与每个波长的声光调制器812的分离角α(ω)和沃拉斯顿棱镜815的分离角β(ω)匹配,其中m=tan(α(ω))/tan(β(ω))。
89.图9是外差光源910的示意图,该外差光源包括激光光源911、声光调制器912、驱动
器913和源光学装置918(即,其包括接收光学元件部分914p和双折射光学元件部分915p)。接收光学元件部分914p包括接收透镜914。双折射光学元件部分915p包括双折射光束移位器915。
90.类似于上文关于图7所述的操作,声光调制器912(例如,剪切波aom)接收输入的第一波长激光光束并产生/生成对应的第一频移激光光束,该对应的第一频移激光光束相对于输入的第一波长激光光束正交偏振。输入透镜914聚焦(例如,在焦距f处)到声光调制器912中,并且成像到无穷远(即,各个光束被准直)。根据双折射光束移位器915的操作特征,第一波长激光光束通过,而第一频移激光光束(即,正交偏振的)被有效地偏移以与第一波长激光光束一起输出。因此双折射光束移位器915的输出是第一组合光束,其包括组合的第一波长激光光束和正交偏振的第一频移激光光束。
91.外差光源910的组件(例如,包括成像透镜914和双折射光束移位器915)因此可被表征为用于共同传播和交叉偏振光束的内联光学装置。更具体地,这些组件可被表征为用于将正交偏振的输出光束组合成来自外差光源输出的单个光束的内联光学装置。如图9所指示的,外差光源910的输出可提供给测量光学装置moa(例如,测量光学装置120、220等)/由测量光学装置moa接收,例如用于测量操作(例如,用于基于利用第一组合光束的测量过程确定到工件上的至少一个表面点的至少一个测量距离)。
92.图10是外差光源1010的示意图,该外差光源包括激光光源1011、声光调制器1012、驱动器1013和源光学装置1018(即,其包括接收光学元件部分1014p和双折射光学元件部分1015p)。接收光学元件部分1014p包括接收棱镜1014。双折射光学元件部分1015p包括双折射光束移位器1015。外差光源1010将被理解为与图9的外差光源910类似地操作,除非下文另有描述。关于具有接收透镜914的图9的外差光源910,图10的外差光源1010的主要差别在于替代地包括接收棱镜1014,光束可对应地组合而不成像。在各种实施方案中,对于接收棱镜1014,棱镜顶角(例如,并且在一些实施方案中,顶点的数目)可与声光调制器1012和输入的波长激光光束的分离角匹配。
93.如上文提到的,图7至10的实施方案具有某些类似的操作特征。在每种配置中,源光学装置(例如,源光学装置718、818、918或1018)接收并组合来自声光调制器的至少第一波长激光光束和第一频移激光光束,并输出对应的第一组合光束。在每种配置中,源光学装置包括接收光学元件部分(例如,包括至少一个接收光学元件,例如相应的透镜714、814a和814b、914以及棱镜1014)和双折射光学元件部分(例如,包括至少一个双折射光学元件,例如相应的沃拉斯顿棱镜715和815以及相应的双折射光束移位器915和1015)。应当理解,在其它实施方案中,可利用替代的双折射光学元件(例如,罗雄棱镜(rochon prism)等)。在每种配置中,接收光学元件部分被配置成接收第一波长激光光束和第一频移激光光束,并将光束沿光路朝向双折射光学元件部分引导。双折射光学元件部分被配置成接收第一波长激光光束和第一频移激光光束,并组合光束以输出对应的第一组合光束。
94.应当理解,图7至10的每个配置的双折射光学元件(例如,包括相应的沃拉斯顿棱镜715和815以及相应的双折射光束移位器915和1015)可在各种实施方案中各自被表征为相对于此类组件的某些其它用途以反向/向后的方向使用。更具体地,此类双折射光学元件更典型地用于接收沿一侧上的光路的光束和/或共同传播的光束,并且然后将光束分开以作为输出提供。与此类现有用途相比,根据图7至10的配置,相应的双折射光学元件均用于
接收不同的光束,并且然后将待输出的光束组合为单个组合光束(例如,包括共同传播的光束)的部分。如上文提到的,图7至10的实施方案因此均被配置为用于将正交偏振的输出光束组合成来自外差光源输出的单个光束的内联光学装置。如图7至10所指示的,每个外差光源的输出可提供给测量光学装置moa(例如,测量光学装置120、220等)/由测量光学装置接收,例如用于测量操作(例如,用于基于利用组合光束的测量过程确定到工件上的至少一个表面点的至少一个测量距离)。
95.图11是外差光源1110的示意图,该外差光源包括激光光源1111、声光调制器1112、驱动器1113和源光学装置1118(即,其包括空间滤波配置1116和准直透镜1117)。在各种实施方案中,激光光源1111可以是多波长激光光源(例如,提供第一、第二、第三等波长激光光束),并且声光调制器1112可对应地产生组合光束,如本文中所描述。在各种实施方案中,来自声光调制器1112的组合光束(例如,包含第一、第二、第三等组合光束)可在到达测量光学装置moa的路径上穿过空间滤波配置1116和准直透镜1117。根据动量守恒原理,不同波长可通过声光调制器1112的操作以不同角度衍射。在一个实施方案中,空间滤波配置1116可包括显微镜物镜透镜1116a和针孔滤波器元件1116b,来自声光调制器1112的组合光束可由物镜透镜1116a成像到针孔滤波器元件1116b(例如,包含10μm针孔)上,使得不同波长的衍射和未衍射光束重叠,并且离开针孔滤波器元件1116b的光有效地用于向准直透镜1117提供光束的点光源(例如,具有如图11所指示的可用重叠区域ua)。在组合光束(例如,包括第一、第二、第三等组合光束)穿过空间滤波配置1116之后,准直透镜1117操作以准直组合光束。
96.通常,多波长激光光源可用在图7至11的实施方案的各种配置中(例如,特别是如上文关于图8和11所描述的,尽管也可用在其它配置中)。关于图11的多波长激光光源1111,提供了多波长激光光源的操作的以下描述,但是应当理解,当对应地利用多波长激光光源时,该描述也可应用于图7至10的任何配置。在一个实例实施方案中,多波长激光光源1111可提供第一频率ω1(即,具有对应的第一波长)的第一波长激光光束,声光调制器1112接收第一波长激光光束并生成频率ω1+δω的对应的第一频移激光光束。类似地,多波长激光光源1111可提供第二频率ω2(即,具有对应的第二波长)的第二波长激光光束,声光调制器1112接收第二波长激光光束并生成频率ω2+δω的对应的第二频移激光光束。类似地,多波长激光光源1111可提供第三频率ω3(即,具有对应的第三波长)的第三波长激光光束,声光调制器1112接收第三波长激光光束并生成频率ω3+δω的对应的第三频移激光光束。在各种实施方案中,多波长激光光源1111可提供额外或较少的波长激光光束(例如,其中声光调制器1112生成对应的额外或较少的频移激光光束)。通常对于声光调制器1112的操作,应当理解,声波上的相移δω在与不取决于波长的所有光束上产生相同量δω的光学相移。对于此类操作,在各种实施方案中,可能希望驱动器1113是锁相射频(rf)驱动器。
97.如上文提到的,定时器联接到声光调制器1112的驱动器1113以提供参考时钟信号,基于该参考时钟信号在驱动器1113中生成调制频率δω。在一个实施方案中,以调制频率δω(例如,在40mhz至100mhz的范围内)提供时钟信号。分布式时钟信号可以等于声光调制器1112中的声波频率并且等于光束的频移δω(例如,光子频率加上一个声频声子)。在各种替代的实施方案中,分布式时钟信号可以是任何其它频率,并且然后用附加电子组件倍增/分频到期望的目标频率的。
98.在该实例中,通过对应波长激光光束的声光调制来获得每个频移激光光束。该配
置的某些优点包括可提供多个波长,所有波长具有相同的频移并且也可以是锁相的,并且总体配置(例如,相对于某些现有配置)可以是相对不太复杂和成本较低的。在各种替代的配置中,可使用其它方法获得每个频移激光光束。例如,对于每个源/频移激光光束对,激光器可以是具有在强轴向磁场中提供的激光介质的塞曼激光器,以产生具有不同频率的两个光束。在各种其它替代实施方案中,可使用电光调制器来代替声光调制器,或者可使用多个双波长源(例如,同时在两个波长上运行的激光器)的组合。
99.在各种实施方案中,多波长激光光源1111在一些配置中可包括用于提供具有不同波长的激光光束的单独激光光源。例如,可包括提供波长比率的期望组合的不同激光光源(例如,在一个特定实例实施方案中,提供例如633nm、687nm和767nm的波长)。例如,在一个实施方案中,包括在多波长激光光源1111中的第一激光光源可提供第一波长激光光束(例如,在一个特定实例实施方案中标称波长为633nm)。外差光源1110可对应地产生如上所述的第一组合光束,包括具有垂直偏振的第一波长(例如,633nm)的第一波长激光光束和具有水平偏振的波长(例如,每个具有线性偏振)的第一频移激光光束。定时器产生设定声光调制器1112的驱动频率(例如,驱动器1113)的时钟信号(例如,40mhz)。结果,第一组合光束导致检测到的拍频信号(例如,40mhz)。
100.类似地,包括在多波长激光光源1111中的第二激光光源可提供第二波长激光光束(例如,在一个特定实例实施方案中标称波长为687nm)。外差光源1110可对应地产生如上所述的第二组合光束,包括具有垂直偏振的第二波长(例如687nm)的第二波长激光光束和具有水平偏振的波长(例如,每个具有线性偏振)的第二频移激光光束。类似地,包括在多波长激光光源1111中的第三激光光源可提供第三波长激光光束(例如,在一个特定实例实施方案中标称波长为767nm)。外差光源1110可对应地产生如上所述的第三组合光束,包括具有垂直偏振的第三波长(例如767nm)的第三波长激光光束和具有水平偏振的波长(例如,每个具有线性偏振)的第三频移激光光束。如上文提到的,定时器可产生设定声光调制器1112的驱动频率(例如,驱动器1113)的时钟信号(例如,40mhz)。结果,第二和第三组合光束中的每一个以调制频率(例如,40mhz)生成检测到的拍频信号。在各种实施方案中,可能期望使用具有窄线宽(例如,用于具有长相干长度)的任何单个激光光源。
101.图12是绘示用于操作外差光源的例程1200的示范性实施方案的流程图。在框1210处,操作外差光源的第一光源以至少提供第一波长激光光束。在框1220处,操作外差光源的声光调制器被以接收第一波长激光光束并生成对应的第一频移激光光束(例如,其具有与第一波长激光光束的偏振正交的偏振)。在各种实施方案中,源光学装置接收并组合来自声光调制器的第一波长激光光束和第一频移激光光束,并输出对应的第一组合光束。该源光学装置包括接收光学元件部分和双折射光学元件部分。接收光学元件部分被配置成接收第一波长激光光束和第一频移激光光束,并将光束沿光路朝向双折射光学元件部分引导。双折射光学元件部分被配置成接收第一波长激光光束和第一频移激光光束,并组合光束以输出对应的第一组合光束(例如,到测量光学装置)。在框1230处,基于利用第一组合光束的测量过程,确定到工件上至少一个表面点的至少一个测量距离。
102.图13是绘示用于操作包括外差光源的数字全息计量系统的例程1300的示范性实施方案的流程图。在框1310处,操作外差光源的多波长光源(例如,多波长激光光源)以至少
提供第一波长激光光束和第二波长激光光束。在框1320处,操作外差光源的声光调制器以:接收第一波长激光光束并生成对应的第一频移激光光束,该对应的第一频移激光光束与第一波长激光光束组合为第一组合光束;以及接收第二波长激光光束并生成对应的第二频移激光光束,该对应的第二频移激光光束与第二波长激光光束组合为第二组合光束。干涉光学装置从外差光源接收组合光束并利用组合光束来提供用于对工件成像的输出。输出至少包含:基于来自外差光源的第一组合光束产生的第一干涉光束;以及基于来自外差光源的第二组合光束产生的第二干涉光束。
103.在框1330处,操作传感器装置以从干涉光学装置接收输出。该传感器装置至少包含第一和第二飞行时间传感器以及第一二向色组件。第一二向色组件被配置成将第一干涉光束与第二干涉光束分离,该第一干涉光束被引导为由第一飞行时间传感器接收并且第二干涉光束被引导为由第二飞行时间传感器接收。在框1340处,从第一和第二飞行时间传感器接收输出,并且利用该输出来确定到工件上的至少一个表面点的至少一个测量距离。
104.尽管已经图示和描述了本公开的优选实施方式,但是基于本公开,所示和所描述的特征布置和操作序列的许多变化对于本领域技术人员来说将显而易见。可以使用各种替代形式来实现本文公开的原理。另外,可以组合上述各个实施方案以提供进一步的实施方案。本说明书中提及的所有美国专利通过引用整体并入本文。如果需要采用各种专利和申请的概念以提供另外的实施方案,则可以修改实施方案的各方面。
105.可以根据上述-详细描述对实施方案进行这些和其它改变。通常,在下面的权利要求中,所使用的术语不应当被解释为将权利要求限制为在说明书和权利要求中公开的特定实施方式,而应当被解释为包含所有可能的实施方式以及此类权利要求被授权的等同物的全部范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1