一种天基引力波探测器频率规划方案制定方法及系统
1.本发明属于计算机技术领域,具体涉及一种天基引力波探测器频率规划方案制定方法及系统。
背景技术:
2.引力波探测是目前物理学研究的热点问题之一,通过超远距离激光干涉测距的方式探测引力波是近几十年主要研究的方法。探测引力波信号的关键点之一是激光全频段的合理规划,即哪些频段用于测量科学数据,哪些频段用于星间通讯,哪些频段用于星间时钟噪声传递。在任务过程中合理的设定各个卫星上的超稳时钟频率、adc采样频率,导频频率等等与频率相关的项是目前急需解决的问题。
3.在目前国内外研究中,仅对用于测量科学数据的拍频频段进行了限定并提供了相应的偏移频率设定方案,并没有构建天基引力波探测器中所有关键频率的合理设定方案,特别是超稳时钟频率、adc采样频率和导频信号频率,这是目前需要解决的问题之一。其中,载波和边频在整个激光功率中的占比对天基引力波探测过程中的读出噪声有较大影响;边频的设定与adc采样频率、导频频率具有强耦合关系;星间拍频频率也会受到adc采样频率、导频频率影响,因此在设定这两个频率时需要避开星间拍频频段。在众多约束条件的影响下,需要制定天基引力波探测器全频率规划方案。
技术实现要素:
4.本发明的目的在于克服无法在众多约束条件的影响下,制定天基引力波探测器全频率规划方案的缺陷。
5.为了实现上述目的,本发明提出了一种天基引力波探测器频率规划方案制定方法,所述天基引力波探测器包括三个卫星组成的卫星编队,每个卫星分别装载两个激光干涉光学平台;所述方法包括:
6.确定优化目标函数和变量约束条件;
7.利用多目标优化算法对优化目标函数求解,构建6种不同主星的偏移频率锁相方案的约束条件和目标函数;采用并行化方式对6种方案进行求解,选择6种方案中持续时间最长的方案作为最终选取的方案;如果多目标优化算法的解有可行解,则计算结束,得到频率规划方案,否则更换多目标优化算法重新计算直至满足变量约束条件;计算结果包括:超稳时钟调制频率、星间拍频频率的下限、星间拍频频率的上限、导频信号频率、adc采样频率、总读出噪声、调整参数、主光学平台和最长持续时间。
8.作为上述方法的一种改进,所述方法具体包括:
9.步骤1:确定优化目标函数,构建变量约束;
10.所述优化目标函数如下:
[0011][0012]
其中,为总读出噪声;f
upper
为星间拍频频率的上限;f
lower
为星间拍频频率的下限;
[0013]
所述变量约束如下:
[0014][0015]
其中:f
mod
为超稳时钟调制频率;为边频总读出噪声;为载波总读出噪声;
[0016]
步骤2:使用多目标优化算法对所述优化目标函数求解;
[0017]
步骤3:对步骤2求解得到的f
upper
,f
lower
和f
mod
进行调整,策略如下:
[0018][0019]
其中,round为四舍五入方法;和分别表示调整后的f
upper
,f
lower
和f
mod
;
[0020]
步骤4:根据和搜寻合适的f
adc
和f
p
并再次更新f
mod
;其中,f
adc
为adc采样频率,f
p
为导频信号频率;
[0021]
步骤4-1:根据获取f
adc
的最小值根据获取f
adc
和f
p
的最大间隔,即1《abs(f
adc-f
p
)《f
lower
;在求解过程中,默认f
p
《f
adc
《100mhz;
[0022]
步骤4-2:采用穷举的方式获取所有可能的[f
mod
,f
p
,f
adc
]组合;假设共有n组可能的组合,存储为如下矩阵:
[0023][0024]
选择矩阵中,距离最近的一个组合得到
[0025]
步骤5:将步骤3调整后的f
upper
和f
lower
作为步骤5的拍频上下限的输入,输入已有的时序多普勒频移数据,构建6种不同主星的偏移频率锁相方案的约束条件和目标函数;对6种方案进行求解,选择6种方案中,持续时间最长的方案作为最终选取的方案;
[0026]
步骤6:根据步骤3和步骤4更新后的重新计算总读出噪声,并更新调整参数m;更新调整参数m的方式如下:
[0027][0028][0029]
即通过更新调整参数m的方式,求得更新后的总读出噪声的最小值,更新后的调整参数m记为m
new
;
[0030]
更新后的解包括:
[0031][0032]
其中,j0(m)和j1(m)分别表示0阶和1阶贝塞尔函数;m
new
为更新后的调整参数m;f
p
,f
adc
为步骤4获取的导频频率和adc采样频率;t为步骤5中获取的最长持续时间;m为步骤5中获取的最长持续时间t所对应选择的主光学平台;rn为步骤6中更新调整参数m后的总读出噪声;
[0033]
步骤7:当步骤2中求得的所有最优解都经过步骤3至步骤6处理后,判断是否存在可行解;若是,则可行解即为最终计算结果;否则更换步骤2中采用的多目标优化算法,重新开始执行步骤2;
[0034]
所述判断是否存在可行解是判断最优解是否符合步骤1的变量约束。
[0035]
作为上述方法的一种改进,所述步骤2具体为:利用多目标优化算法求解得到n组帕累托最优解,将这些解存入n
×
4的矩阵中,4列存储顺序为[f
mod
,f
lower
,f
upper
,m]。
[0036]
作为上述方法的一种改进,所述多目标优化算法包括nsga-ii算法或moead算法。
[0037]
作为上述方法的一种改进,所述三个卫星分别为卫星_1、卫星_2和卫星_3;
[0038]
其中,所述卫星_1包含光学平台a和光学平台b;所述卫星_2包含光学平台c和光学平台d;所述卫星_3包含光学平台e和光学平台f;
[0039]
所述6种锁相方案为:
[0040]
第1种:以光学平台a为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台d锁相到光学平台c,光学平台c锁相到光学平台b,光学平台b锁相到光学平台a,光学平台e锁相到光学平台f,光学平台f锁相到光学平台a;
[0041]
第2种:以光学平台b为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台e锁相到光学平台f,光学平台f锁相到光学平台a,光学平台a锁相到光学平台b,光学平台d锁相到光学平台c,光学平台c锁相到光学平台b;
[0042]
第3种:以光学平台c为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台f锁相到光学平台e,光学平台e锁相到光学平台d,光学平台d锁相到光学平台c,光学平台a锁相到光学平台b,光学平台b锁相到光学平台c;
[0043]
第4种:以光学平台d为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台a锁相到光学平台b,光学平台b锁相到光学平台c,光学平台c锁相到光学平台d,光学平台f锁相到光学平台e,光学平台e锁相到光学平台d;
[0044]
第5种:以光学平台e为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平
台b锁相到光学平台a,光学平台a锁相到光学平台f,光学平台f锁相到光学平台e,光学平台c锁相到光学平台d,光学平台d锁相到光学平台e;
[0045]
第6种:以光学平台f为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台c锁相到光学平台d,光学平台d锁相到光学平台e,光学平台e锁相到光学平台f,光学平台b锁相到光学平台a,光学平台a锁相到光学平台f。
[0046]
作为上述方法的一种改进,所述步骤5的六种不同主星的约束条件如下:
[0047]
第1种:以光学平台a为主光学平台
[0048][0049]
其中,f
12
(t)为卫星1与卫星2之间随时间t变化的时序多普勒频移;f
13
(t)为卫星1与卫星3之间随时间t变化的时序多普勒频移;f
23
(t)为卫星2与卫星3之间随时间t变化的时序多普勒频移;
△fab
为偏移频率,表示光学平台a的激光频率与光学平台b的激光频率之间的人为设定的固定差值;
△fcd
为偏移频率,表示光学平台c的激光频率与光学平台d的激光频率之间的人为设定的固定差值;
△fef
为偏移频率,表示光学平台e的激光频率与光学平台f的激光频率之间的人为设定的固定差值;
△faf
为偏移频率,表示光学平台a的激光频率与光学平台f的激光频率之间的人为设定的固定差值;
△fbc
为偏移频率,表示光学平台b的激光频率与光学平台c的激光频率之间的人为设定的固定差值;
[0050]
第2种:以光学平台b为主光学平台
[0051][0052]
第3种:以光学平台c为主光学平台
[0053][0054]
其中,
△fde
为偏移频率,表示光学平台d的激光频率与光学平台e的激光频率之间
的人为设定的固定差值;
[0055]
第4种:以光学平台d为主光学平台
[0056][0057]
第5种:以光学平台e为主光学平台
[0058][0059]
第6种:以光学平台f为主光学平台
[0060][0061]
所述目标函数为
[0062]
max(t)
[0063]
其中,t表示持续时间;
[0064]
将构造好的目标函数和约束条件采用并行化方式对六种方案进行求解,求解算法采用线性规划算法;选择6种方案中,持续时间最长的方案作为最终选取的方案进行保存;保存顺序为[t,m],其中,t表示持续时间,m表示所对应的主光学平台。
[0065]
本发明还提供一种天基引力波探测器频率规划方案制定系统,所述天基引力波探测器包括三个卫星组成的卫星编队,每个卫星分别装载两个激光干涉光学平台;所述系统包括:
[0066]
初始化模块,用于确定优化目标函数和变量约束条件;
[0067]
规划方案计算模块,用于利用多目标优化算法对优化目标函数求解,构建6种不同主星的偏移频率锁相方案的约束条件和目标函数;采用并行化方式对6种方案进行求解,选择6种方案中持续时间最长的方案作为最终选取的方案;如果多目标优化算法的解有可行解,则计算结束,否则更换多目标优化算法重新计算;计算结果包括:超稳时钟调制频率、星
间拍频频率的下限、星间拍频频率的上限、导频信号频率、adc采样频率、总读出噪声和主光学平台。
[0068]
与现有技术相比,本发明的优势在于:
[0069]
1、采用了分步优化的思想,将频率规划这一复杂问题分步解决并形成闭环,便于复杂全频率规划问题求解并提升求解效率。
[0070]
2、分步优化的过程中,每一步都根据该步的特点选用算法,灵活性高。
[0071]
3、该方法可以得出多个可行解,科研人员根据实际情况拟定评价准则,便可以快捷简便的在多个可行解中选择符合实际的最优解。
附图说明
[0072]
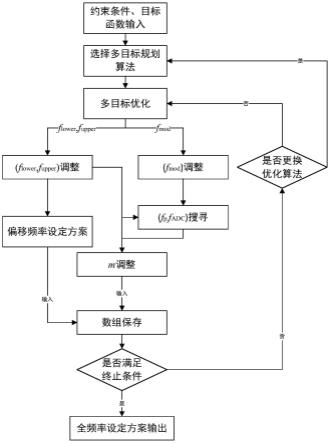
图1所示为全频率规划方案求解流程图;
[0073]
图2所示为偏移频率规划方案求解流程图;
[0074]
图3所示为时序星间多普勒频移示意图;
[0075]
图4所示为不同主光学平台锁相方案展示。
具体实施方式
[0076]
下面结合附图对本发明的技术方案进行详细的说明。
[0077]
本发明的目的在于提供一种天基引力波探测器频率规划方案制定方法,以解决现有的空间引力波探测中各个光学平台中,激光器全频率的规划方案的制定。
[0078]
全链路激光频率涉及到星间拍频频率f
het
,超稳时钟调制频率f
mod
,adc采样频率f
adc
,,导频信号频率f
p
四项,其中星间拍频频率f
het
会随着时间推移受到星间多普勒频移影响进而动态变化,其余三项在任务运行过程中始终保持不变。
[0079]
其中,由于超稳时钟的限制,通常f
mod
不高于5ghz;f
adc
,f
p
的频率由f
mod
通过除法器生成。
[0080]fhet
,f
mod
,f
adc
,f
p
四者的耦合关系如下:
[0081][0082]
由于导频信号频率通常略低于adc的采样频率,为了避免由adc采样导频信号所产出的混叠信号与星间拍频频率重合,有以下约束条件:
[0083][0084]
其中,f
upper
表示星间拍频频率的上限;f
lower
表示星间拍频频率的下限。
[0085]
在整个任务周期中,边频频率等于超稳时钟调制频率f
mod
,用于在星间传输时钟噪声信息。边频频率占用激光总功率的比例、超稳时钟调制频率f
mod
和星间拍频频率f
het
都会
对总读出噪声产生影响。为了保证总读出噪声满足任务指标要求,因此有以下约束:
[0086][0087]
其中,表示总读出噪声,表示载波总读出噪声,表示边频总读出噪声,j0(m)和j1(m)分别表示0阶和1阶贝塞尔函数,m值的大小决定了边频频率在总功率中的占比。通常m∈[0.45,0.64],对应边频占用总功率5%到10%之间。需注意的是,与实际的任务指标相关,在求解过程中,可以进行适应性改变。
[0088]
天基引力波探测器运行过程中,涉及到3颗卫星(卫星_1,卫星_2,卫星_3)之间的联动,3颗卫星之间通过激光传输信息,且每颗卫星包含两个光学平台。由于存在星间运动,因此激光频率在星间传输过程中会受到多普勒频移的影响。本地卫星在接收到远端卫星发来的激光后,接收到的激光与本地激光进行干涉从而获取科学运行数据信息。干涉过程中,接收到的激光频率与本地激光频率的差值称之为拍频频率。为了保证拍频频率在合理的范围,即[f
lower
,f
upper
]之间,需要在弱光锁相过程中加入偏移频率。
[0089]
所述多普勒频移表述为f
ab
(t)表示卫星a与卫星b之间随时间t变化的时序多普勒频移。
[0090]
所述偏移频率表述为
△fxy
表示光学平台x的激光频率与光学平台y的激光频率之间的人为设定的固定差值。
[0091]
所述卫星_1包含光学平台a和光学平台b;所述卫星_2包含光学平台c和光学平台d;所述卫星_3包含光学平台e和光学平台f。
[0092]
所述锁相方案有以下六种:以光学平台a为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台d锁相到光学平台c,光学平台c锁相到光学平台b,光学平台b锁相到光学平台a,光学平台e锁相到光学平台f,光学平台f锁相到光学平台a。
[0093]
以光学平台b为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台e锁相到光学平台f,光学平台f锁相到光学平台a,光学平台a锁相到光学平台b,光学平台d锁相到光学平台c,光学平台c锁相到光学平台b。
[0094]
以光学平台c为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台f锁相到光学平台e,光学平台e锁相到光学平台d,光学平台d锁相到光学平台c,光学平台a锁相到光学平台b,光学平台b锁相到光学平台c。
[0095]
以光学平台d为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台a锁相到光学平台b,光学平台b锁相到光学平台c,光学平台c锁相到光学平台d,光学平台f锁相到光学平台e,光学平台e锁相到光学平台d。
[0096]
以光学平台e为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台b锁相到光学平台a,光学平台a锁相到光学平台f,光学平台f锁相到光学平台e,光学平台c锁相到光学平台d,光学平台d锁相到光学平台e。
[0097]
以光学平台f为主光学平台,其他卫星为从光学平台,其锁相顺序为光学平台c锁
相到光学平台d,光学平台d锁相到光学平台e,光学平台e锁相到光学平台f,光学平台b锁相到光学平台a,光学平台a锁相到光学平台f。
[0098]
所述不同锁相方案对应的时序星间拍频的约束如下,其中表示光学平台x的激光和光学平台y的激光在z卫星干涉后的拍频。
[0099]
以光学平台a为主光学平台
[0100][0101]
其中,
[0102][0103]
以光学平台b为主光学平台
[0104][0105]
其中,
[0106][0107]
以光学平台c为主光学平台
[0108][0109]
其中,
[0110][0111]
以光学平台d为主光学平台
[0112][0113]
其中,
[0114][0115]
以光学平台e为主光学平台flower
),abs表示绝对值;根据公式(3)可知,可以通过减小f
het
的方式减小总读出噪声,f
het
∈[f
lower
,f
upper
],因此引入目标3最小化f
upper
;根据公式(2)可知,f
adc-f
p
《f
lower
,因此引入目标4最大化f
lower
,从而增加f
adc
和f
p
的选择空间。
[0127]
所述变量约束如下:
[0128][0129]
步骤2:选择目前已有的成熟的多目标规划算法对步骤1中构建的优化目标进行求解。备选多目标优化算法有nsga-ii算法和moead算法。求解得到n组帕累托最优解,将这些解存入n
×
4的矩阵中,以供后续步骤使用。4列存储顺序为[f
mod
,f
lower
,f
upper
,m]。需注意的是,此处获得的[f
mod
,f
lower
,f
upper
,m]并不能直接使用,还需要通过后续步骤进行调整。依次选取步骤2中的每一组解进入步骤3至步骤6,对[f
mod
,f
lower
,f
upper
,m]进行微调。
[0130]
步骤3:由于第2步得到的f
upper
,f
lower
和f
mod
并不是整数,因此需要调整第2步中得到的f
upper
,f
lower
和f
mod
,调整策略如下
[0131][0132]
其中,round表示四舍五入,和分别表示调整后的f
upper
,f
lower
和f
mod
。
[0133]
步骤4:根据和搜寻合适的f
adc
和f
p
并再次更新f
mod
。首先,根据获取f
adc
的最小值根据获取f
adc
和f
p
的最大间隔,即1《abs(f
adc-f
p
)《f
lower
。另外,在求解过程中,默认f
p
《f
adc
《100mhz。然后,采用穷举的方式获取所有可能的[f
mod
,f
p
,f
adc
]组合。假设共有n组可能的组合,存储为如下矩阵:
[0134][0135]
选择矩阵中,距离最近的一个组合得到假设距离最近,则
[0136]
步骤5:将第3步调整后的f
upper
和f
lower
作为第5步的拍频上下限的输入,并且输入已有的时序星间多普勒频移数据。构建六种不同主星的偏移频率设定方案的约束条件和目标函数,所述六种不同主星的约束条件如下所示
[0137]
第一种:以光学平台a为主光学平台
[0138][0139]
其中,
[0140][0141]
第二种:以光学平台b为主光学平台
[0142][0143]
其中,
[0144][0145]
第三种:以光学平台c为主光学平台
[0146][0147]
其中,
[0148][0149]
第四种:以光学平台d为主光学平台
[0150][0151]
其中,
[0152][0153]
第五种:以光学平台e为主光学平台
[0154][0155]
其中,
[0156][0157]
第六种:以光学平台f为主光学平台
[0158][0159]
其中,
[0160][0161]
所述目标函数为
[0162]
max(t)
ꢀꢀꢀ
(32)
[0163]
其中,t表示持续时间。
[0164]
将构造好的目标函数和约束条件采用并行化方式对六种方案进行求解,求解算法采用线性规划算法。选择6种方案中,持续时间最长的方案作为最终选取的方案进行保存。保存顺序为[t,m],其中,t表示持续时间,m表示所对应的主光学平台。
[0165]
步骤6:根据步骤3和步骤4更新后的重新计算总读出噪声,并更新
调整参数m。更新调整参数m的方式如下
[0166][0167]
即通过更新调整参数m的方式,求得更新后的总读出噪声的最小值,更新后的调整参数m记为m
new
。
[0168]
步骤7:将更新后的解依次存入新的数组,其数组每一行排列方式为其中m
new
表示更新后的调整参数m,f
p
,f
adc
表示由步骤4获取的导频频率和adc采样频率,t表示步骤5中获取的最长持续时间以及所对应选择的主光学平台m,rn表示步骤6中更新调整参数m后的总读出噪声。
[0169]
步骤8:当步骤2中求得的所有帕累托最优解都经过步骤3至步骤7处理后,判断是否存在可行解。若是,进入步骤10;否则进入步骤9。
[0170]
判断是否存在可行解是判断最优解是否符合步骤1的变量约束。
[0171]
步骤9:判断是否更换步骤1中采用的多目标优化算法,若是则更换,否则沿用之前的优化算法。调整优化算法后,进入步骤1,循环执行步骤1至步骤8直到满足终止条件。
[0172]
步骤10:保存全频率设定方案。
[0173]
本发明的一个实施例如下:
[0174]
步骤1:确认优化目标函数、构建相应变量约束。所述目标函数如下所示
[0175][0176]
共包含有四个求解目标,目标1最小化读出噪声;目标2最大化拍频间隔abs(f
upper-f
lower
),abs表示绝对值;根据公式(3)可知,可以通过减小f
het
的方式减小总读出噪声,f
het
∈[f
lower
,f
upper
],因此引入目标3最小化f
upper
;根据公式(2)可知,f
adc-f
p
《f
lower
,因此引入目标4最大化f
lower
,从而增加f
adc
和f
p
的选择空间。
[0177]
所述变量约束如下:
[0178][0179]
步骤2:选择目前已有的成熟的多目标规划算法对步骤1中构建的优化目标进行求解。备选多目标优化算法有nsga-ii算法和moead算法。求解得到n组帕累托最优解,将这些解存入n
×
4的矩阵中,以供后续步骤使用。4列存储顺序为[f
mod
,f
lower
,f
upper
,m]。需注意的
是,此处获得的[f
mod
,f
lower
,f
upper
,m]并不能直接使用,还需要通过后续步骤进行调整。依次选取步骤2中的每一组解进入步骤3至步骤6,对[f
mod
,f
lower
,f
upper
,m]进行微调。
[0180]
所述帕累托最优解为多目标规划过程中产生的多组可行解的通用表示方式,这些可行解在求解过程中不被其他解所支配。
[0181]
步骤3:由于第2步得到的f
upper
,f
lower
和f
mod
并不是整数,因此需要调整第2步中得到的f
upper
,f
lower
和f
mod
,调整策略如下
[0182][0183]
其中,round表示四舍五入,和分别表示调整后的f
upper
,f
lower
和f
mod
。
[0184]
步骤4:根据和搜寻合适的f
adc
和f
p
并再次更新f
mod
。首先,根据获取f
adc
的最小值根据获取f
adc
和f
p
的最大间隔,即1《abs(f
adc-f
p
)《f
lower
。另外,在求解过程中,默认f
p
《f
adc
《100mhz。然后,采用穷举的方式获取所有可能的[f
mod
,f
p
,f
adc
]组合。假设共有n组可能的组合,存储为如下矩阵:
[0185][0186]
选择矩阵中,距离最近的一个组合得到假设距离最近,则
[0187]
步骤5:如图2、3所示,将第3步调整后的f
upper
和f
lower
作为第5步的拍频上下限的输入,并且输入已有的时序星间多普勒频移数据。构建六种不同主星的偏移频率设定方案的约束条件和目标函数,所述六种不同主星的约束条件如下所示
[0188]
第一种:以光学平台a为主光学平台,如图4(a)所示
[0189][0190]
其中,
[0191][0192]
第二种:以光学平台b为主光学平台,如图4(b)所示
[0193][0194]
其中,
[0195][0196]
第三种:以光学平台c为主光学平台,如图4(c)所示
[0197][0198]
其中,
[0199][0200]
第四种:以光学平台d为主光学平台,如图4(d)所示
[0201][0202]
其中,
[0203][0204]
第五种:以光学平台e为主光学平台,如图4(e)所示
[0205][0206]
其中,
[0207]
[0208]
第六种:以光学平台f为主光学平台,如图4(f)所示
[0209][0210]
其中,
[0211][0212]
所述目标函数为
[0213]
max(t)
ꢀꢀꢀ
(50)
[0214]
其中,t表示持续时间。
[0215]
将构造好的目标函数和约束条件采用并行化方式对六种方案进行求解,求解算法采用线性规划算法。选择6种方案种,持续时间最长的方案作为最终选取的方案进行保存。保存顺序为[t,m],其中,t表示持续时间,m表示所对应的主光学平台。
[0216]
所述并行化方式采用多核多线程并行的方式以提升运算效率。
[0217]
步骤6:根据步骤3和步骤4更新后的重新计算总读出噪声,并更新调整参数m。更新调整参数m的方式如下
[0218][0219]
即通过更新调整参数m的方式,求得更新后的总读出噪声的最小值,更新后的调整参数m记为m
new
。
[0220]
步骤7:将更新后的解存入依次新的数组,其数组每一行排列方式为其中m
new
表示更新后的调整参数m,f
p
,f
adc
表示由步骤4获取的导频频率和adc采样频率,t表示步骤5中获取的最长持续时间以及所对应选择的主光学平台m,rn表示步骤6中更新调整参数m后的总读出噪声。
[0221]
经步骤6更新调整参数m后,求得的矩阵如下所示:
[0222][0223][0224]
步骤8:当步骤2中求得的所有帕累托最优解都经过步骤3至步骤7处理后,判断是否存在可行解。若是,进入步骤10;否则进入步骤9。
[0225]
假定步骤8要求的可行解是持续时间t=2190,读出噪声小于则筛选出以下结果:
[0226]
12002250.5648502190a6.35e-1212002250.5648502190a6.35e-12
[0227]
步骤9:判断是否更换步骤1中采用的多目标优化算法,若是则更换,否则沿用之前
的优化算法。调整优化算法后,进入步骤1,循环执行步骤1至步骤8直到满足终止条件。
[0228]
步骤10:保存全频率设定方案。
[0229]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1