一种斜拉桥索全断面缺陷的漏磁检测机器人
1.本发明属于无损检测技术领域,具体为一种斜拉桥索漏磁检测机器人,能够对斜拉桥索全断面(含护套、内外部钢丝)进行缺陷检测。
背景技术:
2.斜拉桥索作为桥塔与主梁的重要连接部件,长时间服役过程中,表面的非金属护套易出现变形甚至破损,导致雨水渗透进入内部索体,引起钢索索体表面、内部钢丝腐蚀、断裂等缺陷。要对斜拉桥索进行完整性评估,需要对表面的非金属护套、钢索索体的内外部缺陷进行检测,也即全断面缺陷检测。
3.利用目视和光学图像采集方法,已发展了斜拉桥索表面护套的检测技术,但不能对钢索索体腐蚀、断裂等缺陷进行有效检测。利用漏磁法可以对钢索索体缺陷进行检测,但目前采用永磁磁化方式不仅从检测信号中不能分辨索体的内、外部缺陷且检测过程易受提离抖动而出现干扰信号,更重要的是永磁磁路庞重,对机器人的驱动力要求高,导致攀爬机器人本体质量大,不能适应现场的操作便捷、快速等需求。
4.为解决上述问题,本发明专利提出了融合多机位摄像头模组、机械式测距模块和双环磁敏阵列漏磁检测传感器的斜拉桥索漏磁检测机器人,并提供了融合多传感器信号抑制提离抖动对漏磁检测结果影响的方法,以及识别表面护套缺陷和索体内、外部缺陷的扫查方式。采用的双环磁敏阵列漏磁检测传感器因采用了偏置脉冲磁化方式和柔性励磁线圈,大幅降低了传感器的重量,加之机器人及其搭载的检测与控制系统均和上位机进行无线通信,使得斜拉桥索漏磁检测机器人具有轻便的优点,能够实现斜拉桥索全断面(含护套、内外部钢丝)缺陷检测。
技术实现要素:
5.本发明目的在于设计一种斜拉桥索全断面缺陷的漏磁检测机器人,提供一种对斜拉桥索索体内外部与护套检测的有效方法,将双环磁敏阵列漏磁检测传感器与攀爬机器人相结合,通过置于传感器内部凹槽的感应线圈阵列、霍尔阵列与多机位摄像头模组,可实现对斜拉桥索的索体内外部与护套进行缺陷检测与定位,极大地提升了检测范围。通过无线通信模块可远程实现攀爬机器人的运动控制与斜拉桥索缺陷信号的激励采集。
6.为实现上述目的,本发明采取如下技术方案如下:
7.一种斜拉桥索全断面缺陷的漏磁检测机器人,其工作方式是基于漏磁检测原理。该设计由攀爬机器人、双环磁敏阵列漏磁检测传感器、检测与控制系统、多机位摄像头模组、机械式测距模块、连接机构和上位机组成。
8.所述攀爬机器人由履带式驱动机构、运动姿态调整机构、可调式夹紧机构、越障模块与机架构成,其中履带式爬行机构、运动姿态调整机构、可调式夹紧机构、越障模块沿机架对称布置相同的两套。所述履带式驱动机构由驱动轮、从动轮、环形橡胶履带、两级传动齿轮、固定侧板与直流电机构成。直流电机与一级齿轮连接,二级齿轮与驱动轮同轴连接;
环形橡胶履带内表面与驱动轮和从动轮啮合,外表面与斜拉桥索接触;驱动轮通过卡槽的形式固定连接在固定侧板;固定侧板与越障模块通过导轨支架连接,实现沿斜拉桥索上下攀爬。所述越障模块由滑块、压力弹簧、导轨、导轨支架、支撑侧板构成。滑块与压力弹簧连接,通过导轨固定在导轨支架上,形成垂直于斜拉桥索轴向方向的移动副,能够实现有效范围内越障。所述运动姿态调整机构由舵机、换向轴、齿轮构成。舵机固定在导轨支架的支撑侧板上,舵机同轴连接的齿轮与机架的齿轮边啮合,换向轴与机架通过轴承配合的形式,形成平行于斜拉桥索轴向的旋转副,能够实时调整攀爬机器人的行进方向角度,进行姿态纠正。所述可调式夹紧机构由调节手柄、调节螺杆与轴瓦构成。轴瓦固定安装在越障模块的导轨支架上,其内部穿过的调节螺杆与导轨支架通过螺纹连接,调节手柄与调节螺杆通过螺纹连接。旋转调节手柄,施加预紧力至压力弹簧,从而推动履带式爬行机构夹紧或松开斜拉桥索,适用于80mm-120mm直径范围内的斜拉桥索。
9.所述双环磁敏阵列漏磁检测传感器由激励线圈、4通道感应线圈阵列、32通道霍尔阵列、传感器骨架、联接架与导向轮机构构成。激励线圈缠绕在传感器骨架外层凹槽表面,通入直流或脉冲电流以提供磁场对斜拉桥索进行磁化;感应线圈阵列与霍尔阵列安装在传感器骨架内表面的凹槽处,检测由于斜拉桥索表面与内部缺陷产生的磁场变化;两个相同的传感器骨架对称布置于斜拉桥索两侧,通过螺栓连接;4组导向轮对称固定在传感器骨架两端的联接架上,与攀爬机器人连接,能够在其牵引下沿斜拉桥索行进。
10.所述检测与控制系统由stm32h750单片机、电机控制板、舵机控制板、偏置脉冲电流源、多通道采集卡、无线通信模块、姿态传感器、编码器与电源管理电路组成。
11.所述多机位摄像头模组由4套fpv图传发射机、fpv摄像头与环形支架构成。其中fpv图传发射机、fpv摄像头与机械式测距模块共同安装在环形支架上,能够实现对斜拉桥索护套覆盖扫查,通过无线传输将桥索表面图像至上位机。
12.所述机械式测距模块由4个ktr直线拉杆位移传感器均匀布置于环形支架,可实现对桥索护套外周的凹凸变形进行检测。
13.所述上位机安装有能够实现攀爬机器人运动控制、激励采集触发控制、信号显示存储与电源电量监测功能的软件,通过无线通信模块和检测与控制系统进行交互通信,实现攀爬机器人运动控制、激励采集触发控制、信号显示存储与电源电量监测等功能。
14.本发明所述的斜拉桥索全断面缺陷的漏磁检测机器人和现有技术相比,具有实质性特点和显著进步:
15.(1)双环磁敏阵列漏磁检测传感器采用4通道感应线圈阵列与32通道霍尔阵列,通过分时激励脉冲和直流电压信号磁化索体,能够实现对斜拉桥索索体表面与内部缺陷的检测与定位。
16.(2)攀爬机器人设计运动姿态调整机构,采用姿态传感器与舵机联动方式,能够实时调整攀爬机器人运动方向角,保持运动姿态稳定。
17.(3)本发明的斜拉桥索全断面缺陷的漏磁检测机器人设计了可调式夹紧机构,能够检测80-120mm直径范围内的斜拉桥索,具有良好的适用性。
附图说明
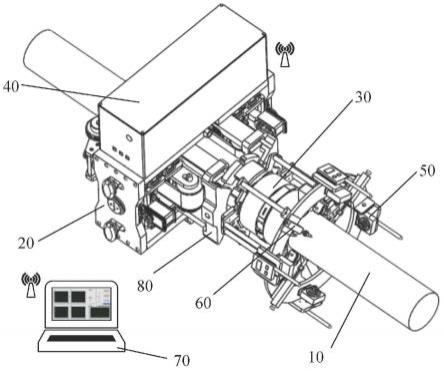
18.图1为总体结构示意图。
19.图2为攀爬机器人整体结构示意图。
20.图3为攀爬机器人内部结构示意图。
21.图4为双环磁敏阵列漏磁检测传感器整体结构示意图。
22.图5为双环磁敏阵列漏磁检测传感器装配示意图。
23.图6为4通道感应线圈阵列与32通道霍尔阵列结构示意图。
24.图7为检测与控制系统原理图。
25.图8为多机位摄像头模组与机械式测距模块示意图。
26.图9为斜拉桥索全断面缺陷的漏磁检测机器人工作时序逻辑图。
27.图10为32通道霍尔阵列与机械式测距仪检测信号图。
28.图11为4通道感应线圈检测信号图。
29.图中:10、斜拉桥索 20、攀爬机器人 30、双环磁敏阵列漏磁检测传感器 40、检测与控制系统 50、多机位摄像头模组 60、机械式测距模块 70、上位机 80、连接机构 201、履带式驱动机构 202、运动姿态调整机构 203、可调式夹紧机构 204、越障模块 205、机架 2011、驱动轮 2012、从动轮 2013、环形橡胶履带 2014、一级传动齿轮 2015、二级传动齿轮 2016、固定侧板 2017、直流电机 2018、电机固定支架 2021、舵机 2022、换向轴 2023、齿轮 2031、调节手柄 2032、调节螺杆 2033、轴瓦 2041、外侧滑块 2042、内侧滑块 2043、压力弹簧 2044、导轨 2045、导轨支架 2046、支撑侧板 301、联接架 302、激励线圈 303、导向轮机构 304、传感器骨架 305、感应线圈 306、感应线圈卡槽 307、霍尔 308、霍尔阵列柔性pcb 401、stm32h750单片机 402、电机控制板 403、舵机控制板 404、偏置脉冲电流源 405、多通道采集卡 406、无线通信模块 407、姿态传感器 408、编码器 409、电源管理电路 501、fpv摄像头 502、fpv图传发射机 503、环形支架。
具体实施方式
30.下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
31.本发明公开了一种斜拉桥索全断面缺陷的漏磁检测机器人,主要由攀爬机器人、双环磁敏阵列漏磁检测传感器、检测与控制系统、多机位摄像头模组、机械式测距模块、连接机构和上位机组成。攀爬机器人沿斜拉桥索行进过程中,多机位摄像头模组拍摄斜拉桥索表面护套图像,机械式测距模块接触式测量护套外周轮廓,以对护套变形、破损等缺陷进行评估;由检测与控制系统的偏置脉冲电流源提供直流(或脉冲电流)给双环磁敏阵列漏磁检测传感器的激励线圈,利用32通道霍尔阵列(或4通道感应线圈阵列)测试表面钢丝缺陷(或内部钢丝缺陷)引起的表面漏磁场,由此实现斜拉桥索钢丝缺陷的检测;利用多机位摄像头模组记录的图像抖动以及机械式测距模块输出曲线的突变等异常情况,确定漏磁检测机器人扫查过程中出现提离抖动的位置,对应剔除32通道霍尔阵列漏磁扫查成像结果中由于提离抖动引起的伪像后,对钢索索体表面缺陷进行检测定位。本发明公布的双环磁敏阵列漏磁检测传感器采用具有柔性、轻便等优点的激励线圈,漏磁检测机器人具有无线控制、轻量化特点,能够对斜拉桥索全断面(含护套、内外部钢丝)缺陷进行检测。
32.攀爬机器人由沿周向对称布置的由履带式驱动机构、运动姿态调整机构、可调式夹紧机构、越障模块与机架构成,其中履带式驱动机构由驱动轮、环形橡胶履带、两级啮合
齿轮、固定侧板与直流电机构成。调节可调式夹紧机构,能够适用80-120mm直径范围内的斜拉桥索。安装于攀爬机器人机架上的检测与控制系统通过无线通信方式接收上位机指令,驱动直流电机转动,实现攀爬机器人上下爬行。行进过程中,攀爬机器人越障模块能够通过压力弹簧组成的移动副越过斜拉桥索表面障碍。检测与控制系统由stm32h750单片机、电机控制板、舵机控制板、偏置脉冲电流源、多通道采集卡、无线通信模块、姿态传感器、编码器与电源管理电路组成。姿态传感器可实时检测行进方向角度是否偏移,反馈姿态信息至机器人控制模块,经电机舵机驱动板驱动舵机转动,实时调节攀爬机器人行进方向角度。双环磁敏阵列漏磁检测传感器由激励线圈、4通道感应线圈阵列、32通道霍尔阵列、传感器骨架、联接架与导向轮机构构成。检测与控制系统通过无线控制偏置脉冲电流源对激励线圈提供直流(或脉冲电流)信号,实现对斜拉桥索索体的磁化,4通道感应线圈阵列与32通道霍尔阵列分别检测与定位斜拉桥索内外部缺陷,经多通道采集卡与无线通信模块连接,将缺陷信息数据传输至上位机。多机位摄像头模组由4套fpv图传发射机、fpv摄像头构成,可对斜拉桥索护套进行视频扫查,经fpv发射机传输至上位机。机械式测距模块可实现对桥索护套外周的凹凸变形进行检测。上位机安装有可实现攀爬机器人运动控制、激励采集触发控制、信号显示存储与电源电量监测功能的软件。该发明提供的斜拉桥索全断面缺陷的漏磁检测机器人具有无线控制、便携特点,适用于检测人员对斜拉桥索的索体内部、表面与护套进行缺陷检测。
33.如图1所示,根据本发明实施例的斜拉桥索全断面缺陷的漏磁检测机器人,前端为攀爬机器人20以及固定在上方的检测与控制系统40,中间部分为双环磁敏阵列漏磁检测传感器30,通过连接机构80与攀爬机器人20连接,后端为多机位摄像头模组50与机械式测距模块60,固定连接在环形支架503上,与双环磁敏阵列漏磁检测传感器30通过螺纹孔连接。仪器整体对称安装于斜拉桥索10两侧,上位机70设置在地面端,与检测与控制系统40通过无线的方式远程通讯。
34.如图2至图3所示,攀爬机器人20包括履带式驱动机构201、运动姿态调整机构202、可调式夹紧机构203、越障模块204与机架205。履带式驱动机构201由驱动轮2011、从动轮2012、环形橡胶履带2013、一级传动齿轮2014、二级传动齿轮2015、固定侧板2016、直流电机2017、电机固定支架2018构成。直流电机2017与一级齿轮2014同轴连接,二级齿轮2015与驱动轮2011同轴连接;环形橡胶履带2013内表面与驱动轮2011与从动轮2012啮合,外表面与斜拉桥索10接触;该部分结构可以实现将直流电机2017的扭矩经驱动轮2011输送至环形橡胶履带2013,进而带动环形橡胶履带2013绕驱动轮与从动轮中轴线旋转,实现沿斜拉桥索上下攀爬。驱动轮2011通过卡槽的形式固定连接在固定侧板2016,通过固定侧板2016与越障模块204通过导轨支架2041使用螺栓连接。越障模块204由外侧滑块2041、内侧滑块2042、4个压力弹簧2043、导轨2044、两个导轨支架2045、支撑侧板2046构成。外侧滑块2041与内侧滑块2042之间通过压力弹簧2043连接,并以卡槽的形式与导轨配合,通过螺栓固定在导轨支架2045上,两导轨支架2045间留有一定间隙,外侧导轨支架2045与支撑侧板2046通过螺栓连接固定;该部分结构可以实现环形橡胶履带2013遇到障碍时,驱动轮2011与从动轮2012带动内侧的导轨支架通过内侧的滑块2042压缩压力弹簧2043,形成垂直于斜拉桥索10轴向方向的移动副,从而实现有效范围内越障。运动姿态调整机构202由舵机2021、换向轴2022、齿轮2023构成。舵机通过螺栓固定在支撑侧板2046上,齿轮2023与舵机2021同轴连
接,与机架205的齿轮边啮合,换向轴2022与机架205通过轴承连接,形成平行于斜拉桥索10轴向的旋转副,能够实时调整攀爬机器人20的行进方向角,进行姿态纠正。所述可调式夹紧机构203由调节手柄2031、调节螺杆2032与轴瓦2033构成。轴瓦2033固定安装在越障模块204的外侧导轨支架2045上,其内部穿过的调节螺杆2032与外侧滑块2041通过螺纹连接,内侧滑块2041调节手柄2031与调节螺杆2032亦通过螺纹连接。旋转调节手柄2031,能够施加预紧力至压力弹簧2043,从而推动履带式驱动机构201的环形橡胶履带2013夹紧或松开斜拉桥索10,适用于80mm-120mm直径范围内的斜拉桥索10。该结构与上述越障模块204采用沿斜拉桥索10轴向与径向均对称布置4套的形式,确保整体越障与安装拆卸时的平衡与稳定。
35.如图4至图6所示,双环磁敏阵列漏磁检测传感器30由联接架301、激励线圈302、导向轮机构303、传感器骨架304、感应线圈305、感应线圈卡槽306、霍尔307、霍尔阵列柔性pcb308构成。两个激励线圈302沿轴向对称缠绕在传感器骨架304外层凹槽表面,能够施加直流电压与脉冲电压对斜拉桥索10的索体进行磁化;4通道感应线圈305阵列周向对称布置在感应线圈卡槽306内,每通道由8个感应线圈串联接线组成;与32通道霍尔307阵列层叠安装在传感器骨架内表面的凹槽中;该结构可以实现激励线圈302施加直流电压时,32通道霍尔阵列307拾取由斜拉桥索10索体表面缺陷产生的漏磁场,激励线圈302施加脉冲电压时,4通道感应线圈305阵列通过互感的方法检测索体内部缺陷的产生的磁通变化,并能够从4个象限内对缺陷进行定位;两个相同的传感器骨架304对称布置于斜拉桥索10两侧,通过螺栓紧固连接;4组导向轮机构303对称固定在传感器骨架304两端的联接架301上;联接架301通过上述连接机构80与攀爬机器人20通过螺栓连接,能够在其牵引下沿斜拉桥索10上下行进。
36.如图7所示,检测与控制系统40由stm32h750单片机401、电机控制板402、舵机控制板403、偏置脉冲电流源404、多通道采集卡405、无线通信模块406、姿态传感器407、编码器408与电源管理电路409构成;无线通信模块406与上位机70采用2.4g无线通信方式。上位机发送攀爬机器人20运动控制、激励采集触发控制指令无线通信模块406经发送至检测与控制系统40的核心stm32h750单片机401,stm32h750单片机401通过发送pwm电平信号至电机控制板402,控制直流电机2017转动,进而驱动攀爬机器人20沿斜拉桥索10爬行;舵机控制板403亦通过接收stm32h750单片机401的pwm电平信号来驱动舵机2021转动,实现运动姿态角度调整;编码器408与直流电机2017同轴连接,能够输出脉冲信号,传输至stm32h750单片机401转换为行进距离,继而通过采用串口连接的无线通信模块406发送至上位机70;偏置脉冲电流源404通过stm32h750单片机401的ttl指令触发,可以输出dc24v与脉冲400v电压至双环磁敏阵列漏磁检测传感器30的激励线圈302,从而实现对斜拉桥索10索体的磁化过程;双环磁敏阵列漏磁检测传感器30的32通道霍尔阵列307采集到的索体表面缺陷产生的如图10所示的漏磁信号,4通道感应线圈305阵列采集到的索体内部缺陷产生的如图11所示的感应信号均由多通道采集卡405进行采集,继而通过采用以太网口连接的无线通信模块406发送至上位机70,上位机70上述信号进行显示存储;姿态传感器407可以采集攀爬机器人20的运动姿态倾角发送至stm32h750单片机,再经无线通信模块406传输至上位机70,从而判断攀爬机器人20是否发生自转现象,并对旋转后双环磁敏阵列漏磁检测传感器30的信号进行补偿,从而还原真实的斜拉桥索10检测信号;电源管理电路409的功能是为检测与控制系统40、直流电机2017与舵机2021供电,其电量信息通过无线通信模块406发送至上位机
70,上位机70可实现电源电量实时监测功能,避免机器人由电量不足无法使用的情况。
37.如图8所示,多机位摄像头模组50由fpv摄像头501、fpv图传发射机502与环形支架503构成。其中fpv摄像头501、fpv图传发射机502与机械式测距模块60各4个共同固定安装在2个由螺栓紧固对称的环形支架503上,能够实现以拍摄视频和图像的形式对斜拉桥索10护套表面覆盖扫查,通过无fpv图传发射机502将检测视频与图像以5.8g频率无线传输至上位机70。机械式测距模块60主体采用滑动变阻器的原理,当遇到斜拉桥索10护套表面的凸起或凹槽等影响磁测信号的干扰因素时,机械式测距模块60由于内阻发生改变能够输出对应的电压信号,从而实现对上述干扰因素识别与剔除。
38.如图9所示,为本发明的斜拉桥索全断面缺陷的漏磁检测机器人具体工作时序逻辑。t1时间内,漏磁检测机器人沿斜拉桥索10上行至顶点位置,激励线圈304通入直流电压信号,在此期间,32通道霍尔307阵列与机械式测距模块60同时工作,能够完成对斜拉桥索10索体表面与护套的缺陷检测,生成如图11所示的检测信号,两信号均出现波峰点即可确定为扫查过程中出现提离抖动的位置,进而可实现对应剔除32通道霍尔307阵列漏磁扫查成像结果中由于提离抖动引起的伪像后,对斜拉桥索10索体表面缺陷进行检测定位。t2时间内,机器人暂停至斜拉桥索10顶点位置,等待上位机70对32通道霍尔307阵列信号进行分析。t3时间内,漏磁检测机器人开始下行,移动至表面缺陷位置区域,对激励线圈304进行脉冲信号激励,在此期间,4通道感应线圈305阵列工作,将感应信号输出至多通道采集卡405,上位机70判断标记缺陷位置处是否存在内部缺陷。为了更直观地对比所检测到缺陷位置处的信号与图像,这里采用多机位摄像头模组50全时段工作的方式,能够全程记录斜拉桥索表面的图像视频,实现对斜拉桥索10护套进行覆盖扫查。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1