一种基于杂草去除的视觉导航方法
1.本发明涉及田间杂草去除技术领域,具体为一种基于杂草去除的视觉导航方法。
背景技术:
2.随着农业劳动力成本的提高,发达国家广泛开展了农业机器人研究,近年,又开始了对除草机器人的研究,目前,在我国主要使用的除草方法是人工锄抚刀抚,其特点是劳动强度大、耗时费力、效率低、效果欠佳,除草工作完成后,幼苗仍会受到不同程度的草害威胁,但是国内对于除草机器人的研究正在起步,这其中机器人机械臂的运动学分析和图像识别又是比较关键的技术,以及除草方法的不断改进更使效率大大提高,且目前在对田间苗草信息进行获取时,苗草信息的获取技术主要有三种,分别为机器视觉技术、地理信息系统技术和近距离传感器实时检测技术,且杂草和作物的辨别主要依靠机器视觉技术实现;
3.但是当前的机器视觉技术在采集信息过程中,容易受到光线阴暗、作物大小和杂草密集度的影响,从而导致对其采集结果造成影响,同时地理信息系统技术在使用前需要单独的绘制地理种子地图,从而使得绘制地图和锄草作业不在一个时间段,导致锄草作业容易因时间变化而不可控,影响实际锄草效果,近距离传感器实时检测技术使用时需要靠近作物才能够检测出杂草,因此其对苗草信息获取的范围小,因此当前的苗草获取技术均无法单独高效的完成田间杂草的清除。
技术实现要素:
4.本发明提供一种基于杂草去除的视觉导航方法,可以有效解决上述背景技术中提出是当前的机器视觉技术在采集信息过程中,容易受到光线阴暗、作物大小和杂草密集度的影响,从而导致对其采集结果造成影响,同时地理信息系统技术在使用前需要单独的绘制地理种子地图,从而使得绘制地图和锄草作业不在一个时间段,导致锄草作业容易因时间变化而不可控,影响实际锄草效果,近距离传感器实时检测技术使用时需要靠近作物才能够检测出杂草,因此其对苗草信息获取的范围小,因此当前的苗草获取技术均无法单独高效的完成田间杂草的清除的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于杂草去除的视觉导航方法,该视觉导航方法主要基于机器视觉的除草机器人杂草识别算法来精准的计算出苗心的精准位置和杂草清除的区域位置信息,并结合除草机器人上的视觉传感器来识别作物的行中心线,从而计算出除草机器人的位姿和除草机器人自主行走的路线,使除草机器人按照规定的行走路线能够有效的对杂草清除区域的杂草进行清除;
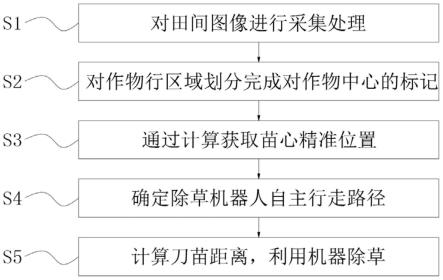
6.视觉导航方法具体包括如下步骤:
7.s1、对田间图像进行采集处理;
8.s2、对作物行区域划分完成对作物中心的标记;
9.s3、通过计算获取苗心精准位置;
10.s4、确定除草机器人自主行走路径;
11.s5、计算刀苗距离,利用机器除草。
12.根据上述技术方案,所述s1中,对田间图像进行采集处理具体是指对玉米大田种植的玉米作物进行图像采集,主要对田间的玉米作物图像采集和对田间的杂草图像采集,在图像采集后,将采集的图像中的作物和杂草作为绿色植物区,将土壤作为背景区,同时将两个区域的图像进行灰度化处理,以完成两个区域的分割。
13.根据上述技术方案,在图像分割时,主要在计算机上进行,且主要利用颜色特征来将绿色植物从土壤的背景中分割出来,绿色植物主要为农作物和杂草,且为了减少图像分割的处理时间,在rgb空间中直接将24位真彩色图像转化为二值图像,0为背景,1为绿色植物,顺序搜索图像中每一个像素点,如果当前像素中g》r且g》b,则将该像素值置1为植物,否则0为背景,从而完成图像分割,rgb颜色空间以r:红、g:绿、b:蓝三种基本色为基础;
14.在获取图像后,基于可见光像素直方图的快速识别算法来对图像进行进一步处理,由于田间图像采用改进的超滤算法灰度化后的目标与背景在灰度值上存在差异,因此需要采用最大类间方差法进行阈值选取。
15.根据上述技术方案,在对田间图像进行采集时,需要对田间采集图像时的光线进行控制,在具体对光线进行控制的过程中,具体包括补光操作和挡光操作;
16.所述补光操作是指在高清相机在获取田间图像信息时,在遇到天气光线阴暗的情况时,通过补光设备在高清相机获取田间图像的视角内进行补光,以此来保证田间图像信息获取的清晰度;
17.所述挡光操作是指高清相机在获取图像时,在阳光光线强烈并存在反光的情况下,通过挡光设备来对高清相机进行挡光,从而避免光线强烈反光而造成田间图像获取时存在不清楚的现象。
18.根据上述技术方案,所述s2中,对作物行区域划分完成对作物中心的标记是指通过对作物进行区域划分,并对其直方图进行统计和修正,以此来划定作物的包围框,从而完成对作物中心的标记处理。
19.根据上述技术方案,所述s3中,通过计算获取苗心精准位置主要是通过前期研究的对比,来结合中值滤波的方法,滤除细小噪声,只剩下叶片,再通过计算叶片的形心,以此来获得苗心的精准位置。
20.根据上述技术方案,所述s4中,确定除草机器人的自主行走路径在具体实现过程中,主要通过除草机器人上安装的视觉传感器来识别出作物的行中心线,并以此来计算出除草机器人的位姿,并使除草机器人以农作物的行中心线为基准线,沿行中心线进行自主行走。
21.根据上述技术方案,在计算出除草机器人的位姿时,主要利用usb接口摄像头连续采集图像,并对采集的图像在rgb空间内直接完成图像分割,利用hough变换检测出导航线,根据透视变换原理与摄像头姿态在线实时地求出除草机器人位姿。
22.根据上述技术方案,在s4中,农田作物大多都是以行为单位进行种植,行间有一定的间距,在作物生长的同时,一些杂草生长在农作物的行间和行内,从而研究行间杂草的识别。
23.根据上述技术方案,所述s5中,计算刀苗距离主要是利用苗心到图像中心的偏差像素数来计算刀苗距,以此来确定杂草清除的区域位置信息,并将该位置信息传输至除草
机器人;
24.利用机器除草是指在作物包围框内除苗心以外的区域通过除草机器人来对确定的杂草清除区域进行除草作业,除草机器人在除草时,主要按照其规定的行走路径进行行走,在除草机器人到达杂草清除区域后,除草机器人停止行走,根据杂草清除的区域位置信息来确定杂草的准确清除的位置信息,并将除草机器人的机械手臂移动到杂草清除位置,自动进行除草;
25.在该区域位置除草结束后,除草机器人的除草动作停止,除草机器人继续沿农作物行行走。
26.与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便:
27.通过基于机器视觉的除草机器人杂草识别算法来精准的计算出苗心的精准位置和杂草清除的区域位置信息,以此来方便快速的对田间苗草的位置进行精确定位,且结合信息共享技术,使田间苗草的位置信息同步至除草机器人的末端执行器,且在此基础上,结合除草机器人上近距离安装的视觉传感器来进一步识别作物的行中心线,从而计算出除草机器人的位姿和除草机器人自主行走的路线,使除草机器人按照规定的行走路线进行行走,且结合田间苗草的位置信息,来方便精准有效的对杂草清除区域的杂草进行清除作业,通过以不同的获取方式来分别获取苗草的位置信息和除草机器人行走位置信息,以便更好的完成杂草清除的工作。
28.通过对田间采集图像时的光线进行控制,方便在遇到天气光线阴暗的情况时,通过补光设备在高清相机获取田间图像的视角内进行补光,以此来保证田间图像信息获取的清晰度,同时能够在阳光光线强烈并存在反光的情况下,通过挡光设备来对高清相机进行挡光,从而避免光线强烈反光而造成田间图像获取时存在不清楚的现象,通过以上对田间关系进行补光和挡光操作,使得高清相机在获取田间图像时能够保持图像获取的精度和清晰度,从而便于后续更准确的识别计算出苗草的具体位置信息。
附图说明
29.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
30.在附图中:
31.图1是本发明视觉导航方法的步骤流程图。
具体实施方式
32.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
33.实施例:如图1所示,本发明提供一种技术方案,一种基于杂草去除的视觉导航方法,该视觉导航方法主要基于机器视觉的除草机器人杂草识别算法来精准的计算出苗心的精准位置和杂草清除的区域位置信息,并结合除草机器人上的视觉传感器来识别作物的行中心线,从而计算出除草机器人的位姿和除草机器人自主行走的路线,使除草机器人按照规定的行走路线能够有效的对杂草清除区域的杂草进行清除;
34.视觉导航方法具体包括如下步骤:
35.s1、对田间图像进行采集处理;
36.s2、对作物行区域划分完成对作物中心的标记;
37.s3、通过计算获取苗心精准位置;
38.s4、确定除草机器人自主行走路径;
39.s5、计算刀苗距离,利用机器除草。
40.基于上述技术方案,s1中,对田间图像进行采集处理具体是指对玉米大田种植的玉米作物进行图像采集,主要对田间的玉米作物图像采集和对田间的杂草图像采集,在图像采集后,将采集的图像中的作物和杂草作为绿色植物区,将土壤作为背景区,同时将两个区域的图像进行灰度化处理,以完成两个区域的分割。
41.基于上述技术方案,在图像分割时,主要在计算机上进行,且主要利用颜色特征来将绿色植物从土壤的背景中分割出来,绿色植物主要为农作物和杂草,且为了减少图像分割的处理时间,在rgb空间中直接将24位真彩色图像转化为二值图像,0为背景,1为绿色植物,顺序搜索图像中每一个像素点,如果当前像素中g》r且g》b,则将该像素值置1为植物,否则0为背景,从而完成图像分割,rgb颜色空间以r:红、g:绿、b:蓝三种基本色为基础;
42.在获取图像后,基于可见光像素直方图的快速识别算法来对图像进行进一步处理,由于田间图像采用改进的超滤算法灰度化后的目标与背景在灰度值上存在差异,因此需要采用最大类间方差法(otsu法)进行阈值选取。
43.基于上述技术方案,在对田间图像进行采集时,需要对田间采集图像时的光线进行控制,在具体对光线进行控制的过程中,具体包括补光操作和挡光操作;
44.补光操作是指在高清相机在获取田间图像信息时,在遇到天气光线阴暗的情况时,通过补光设备在高清相机获取田间图像的视角内进行补光,以此来保证田间图像信息获取的清晰度;
45.挡光操作是指高清相机在获取图像时,在阳光光线强烈并存在反光的情况下,通过挡光设备来对高清相机进行挡光,从而避免光线强烈反光而造成田间图像获取时存在不清楚的现象。
46.基于上述技术方案,s2中,对作物行区域划分完成对作物中心的标记是指通过对作物进行区域划分,并对其直方图进行统计和修正,以此来划定作物的包围框,从而完成对作物中心的标记处理。
47.基于上述技术方案,s3中,通过计算获取苗心精准位置主要是通过前期研究的对比,来结合中值滤波的方法,滤除细小噪声,只剩下叶片,再通过计算叶片的形心,以此来获得苗心的精准位置。
48.基于上述技术方案,s4中,确定除草机器人的自主行走路径在具体实现过程中,主要通过除草机器人上安装的视觉传感器来识别出作物的行中心线,并以此来计算出除草机器人的位姿,并使除草机器人以农作物的行中心线为基准线,沿行中心线进行自主行走。
49.基于上述技术方案,在计算出除草机器人的位姿时,主要利用usb接口摄像头连续采集图像,并对采集的图像在rgb空间内直接完成图像分割,利用hough变换检测出导航线,根据透视变换原理与摄像头姿态在线实时地求出除草机器人位姿。
50.基于上述技术方案,在s4中,农田作物大多都是以行为单位进行种植,行间有一定的间距,在作物生长的同时,一些杂草生长在农作物的行间和行内,从而研究行间杂草的识
别。
51.基于上述技术方案,s5中,计算刀苗距离主要是利用苗心到图像中心的偏差像素数来计算刀苗距,以此来确定杂草清除的区域位置信息,并将该位置信息传输至除草机器人;
52.利用机器除草是指在作物包围框内除苗心以外的区域通过除草机器人来对确定的杂草清除区域进行除草作业,除草机器人在除草时,主要按照其规定的行走路径进行行走,在除草机器人到达杂草清除区域后,除草机器人停止行走,根据杂草清除的区域位置信息来确定杂草的准确清除的位置信息,并将除草机器人的机械手臂移动到杂草清除位置,自动进行除草;
53.在该区域位置除草结束后,除草机器人的除草动作停止,除草机器人继续沿农作物行行走。
54.最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1