一种基于机器视觉叶轮不平衡监测的方法与流程
1.本发明涉及风电机组监测技术领域,尤其涉及一种基于机器视觉叶轮不平衡监测的方法。
背景技术:
2.随着风电机组容量不断增加,叶轮直径持续增大,所带来的叶轮不平衡的风险和危害越来越大,当叶片由于结冰、污损、雷击等原因导致的气动不平衡、质量不平衡,会加剧系统的疲劳载荷和极限载荷,导致机组振动增加,从而降低机组寿命,乃至引发重大安全事故。所以对叶轮不平衡造成的故障原因、部位和危险程度等进行识别和评价,并且有针对性地实施维护决策,延长设备的使用寿命,减少维修时间,提高维修质量,节约维修费用,延长风电机组持续无故障运行时间变得重要且关键。
3.目前存在的叶轮不平衡测试和监测的方案有,1、应变片监测方案,2、地面净空测量方案。应变片监测方案主要是在叶片上加装应变片来测量叶片载荷应变情况,识别载荷不平衡进而预警叶轮不平衡,该方法较为直接,但是叶片为细长结构,需要在叶片内部粘贴应变片,安装较为困难,而且所需要安装应变片的数量较多,另外叶片中对于防雷要求特别高,因此对于该方案也带来了许多挑战。地面净空测量方案是通过地面安装摄像机测量机组连续的净空值,计算各个叶片的净空值,通过不同叶片净空值明显的差异判断叶轮不平衡,该方案输入测试方案,无法做到实时监测并预警,而且对于相机测试距离有一定要求,特殊地形或者地区的机组无法展开测试。
技术实现要素:
4.为了解决现有技术的不足,本发明提供了一种基于机器视觉叶轮不平衡监测的方法,通过机器视觉手段从机舱位置实时获取下方塔筒和叶片图像,通过图像处理手段,获得每帧图像叶片的叶尖等效点,进而绘制出不同叶片在叶轮旋转过程中划过的轨迹线,通过各叶片彼此轨迹线的距离来判断是否超出设定限制报警,实时监测,实施便捷,在接入机组主控时,还能够起到叶轮不平衡的监测和报警功能。
5.本发明为解决其技术问题所采用的技术方案是:提供了一种基于机器视觉叶轮不平衡监测的方法,包括以下步骤:
6.s1、将相机安装于风电机组的机舱前端下部;
7.s2、相机获取视频数据并通过视频实时流传递至处理器;
8.s3、处理器对视频数据中的每帧图像进行处理,进行叶轮不平衡预警判断。
9.步骤s3具体包括以下过程:
10.s3.1、初始化记录列表,开始计时;
11.s3.2、对于视频数据中的每帧图像,通过机器学习方法或者通过帧差、去噪和灰度处理,进而识别叶片轮廓找到叶尖,形成叶尖等效点,将叶尖等效点录入记录列表;
12.s3.3、对于记录列表中的叶尖等效点,根据最小二乘法拟合直线,得到各叶片的轨
迹线;
13.s3.4、对各叶片的轨迹线进行有效性判断,若判断有效则进入步骤s3.6,否则丢弃轨迹线;
14.s3.5、选择叶片处于特定点前后限定数目像素的区域内,进行各叶片轨迹线的间距计算,获得各叶片彼此的间距,取其中最大距离作为距离差值
△
;
15.s3.6、判断距离差值
△
是否超过预值,若是,则使得记录列表添加该距离差值
△
,如果记录的列表长度大于限定长度则报警,提示存在叶轮不平衡,需要用户排查、验证和解决;
16.s3.7、判断记录列表中的记录个数是否达到预警个数或者超过计时周期,若满足任意一项,则清除记录列表并返回步骤s3.1,否则进入步骤s3.2。
17.步骤s3.3根据最小二乘法拟合直线具体包括以下过程:设待拟合直线表示为:y =a+bx,其中待求解参数a代表截距,b代表斜率;用最小二乘法估计待求解参数a和 b,将叶尖等效点数据代入使其值达到最小;其中(xi,yi)为叶尖等效点数据;求解得到待求解参数a的最佳估计值b的最佳估计值
18.步骤s3.4对各叶片的轨迹线进行有效性判断具体包括以下过程:计算得到相关系数其中利用相关系数直线拟合决定系数r2或者斜率a对各叶片的轨迹线进行有效性判断。
19.步骤s3.5得到距离差值
△
后,通过以下过程进行工况稳定性判断:接入风机主控数据,获取平均风速、叶轮转速、功率和桨距角变化范围数据,根据机组特性选取其中的参数作为限制条件,判断工况稳定性。
20.步骤s3.6中,通过接入风机主控数据获取叶轮方位角或叶片编号信息,定位叶轮不平衡的叶片,定位叶轮不平衡的叶片。
21.本发明基于其技术方案所具有的有益效果在于:
22.本发明提供的一种基于机器视觉叶轮不平衡监测的方法部署实施一套视频叶片监测系统,通过图像识别方案便捷有效且准确地捕捉叶片轨迹,进而识别叶轮不平衡现象,实时监测及时的报警,避免机组因为叶轮不平衡带来的危害,能够实现自动化自主的预警和保护,无需人工参与即可实现预警功能,图像识别的精度在厘米级,精度和分辨率都很高,判断逻辑简单有效,图能够获取叶轮不平衡逻辑综合机组控制信息,能够提高预警的准确性。
附图说明
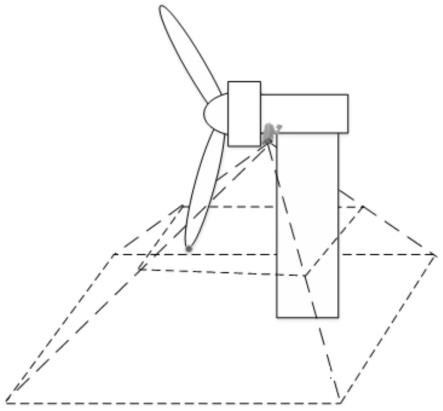
23.图1是叶尖等效点立体示意图。
24.图2是叶尖等效点成像示意图。
25.图3是叶片轨迹示意图。
26.图4是轨迹距离计算示意图。
具体实施方式
27.下面结合附图和实施例对本发明作进一步说明。
28.本发明提供了一种基于机器视觉叶轮不平衡监测的方法,包括以下步骤:
29.s1、将相机安装于风电机组的机舱前端下部。
30.s2、相机获取视频数据并通过视频实时流传递至处理器。
31.s3、处理器对视频数据中的每帧图像进行处理,进行叶轮不平衡预警判断,具体包括以下过程:
32.s3.1、初始化记录列表,开始计时。
33.s3.2、对于视频数据中的每帧图像,通过机器学习方法或者通过帧差、去噪和灰度处理。如图1所示,相机在立体空间中捕捉叶片和塔筒,形成二维图像,如图2所示,通过专业的图像处理算法可以从二维图像中获得叶尖等效点,将叶尖等效点录入记录列表。
34.s3.3、对于记录列表中的叶尖等效点,根据最小二乘法拟合直线,得到各叶片的轨迹线,如图3所示。根据最小二乘法拟合直线具体包括以下过程:
35.设待拟合直线表示为:y=a+bx,其中待求解参数a代表截距,b代表斜率;用最小二乘法估计待求解参数a和b,将叶尖等效点数据代入使其值达到最小;其中(xi,yi)为叶尖等效点数据;求解得到待求解参数a的最佳估计值b的最佳估计值
36.s3.4、对各叶片的轨迹线进行有效性判断,若判断有效则进入步骤s3.6,否则丢弃轨迹线。
37.对各叶片的轨迹线进行有效性判断具体包括以下过程:计算得到相关系数其中利用相关系数直线拟合决定系数r2或者斜率a对各叶片的轨迹线进行有效性判断:如果各叶片斜率明显不同,存在较大偏差说明识别的轨迹有问题;且如果r2较小认为直线拟合的效果不佳,将其剔除,进一步减少系统误报的概率。
38.s3.5、选择叶片处于特定点前后限定数目像素的区域内,进行各叶片轨迹线的间距计算,获得各叶片彼此的间距,取其中最大距离作为距离差值
△
,如图4所示。具体通过以下过程进行工况稳定性判断:接入风机主控数据,获取平均风速、叶轮转速、功率和桨距角变化范围数据,根据机组特性选取其中的参数作为限制条件,判断工况稳定性。如桨距角变化《1
°
,风速波动《3m/s,功率波动《200kw,叶轮转速变化<5%。
39.s3.6、判断距离差值
△
是否超过预值,若是,则使得记录列表添加该距离差值
△
,如果记录的列表长度大于限定长度则报警,提示存在叶轮不平衡,需要用户排查、验证和解决。若接入风机主控数据,还可获取叶轮方位角或叶片编号信息,定位叶轮不平衡的叶片。
40.s3.7、判断记录列表中的记录个数是否达到预警个数或者超过计时周期,若满足任意一项,则清除记录列表并返回步骤s3.1,否则进入步骤s3.2。
41.本发明提供的一种基于机器视觉叶轮不平衡监测的方法,基于机器视觉或者其它测量手段能够识别叶尖或者叶身轨迹进而计算各叶片之间距离差异来判断叶轮不平衡的方法或装置,同时可将轨迹距离结果结合主控信息进行异常点剔除,提高预警准确率的手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1