一种基于盾构小半径转弯测量导向系统全站仪换站方法与流程
1.本发明属于盾构小半径转弯施工领域,特别涉及一种基于盾构小半径转弯测量导向系统全站仪换站方法。
背景技术:
2.在盾构测量系统全站仪换站流程为,选取新站点,将原站点作为后视点,随后将全站仪架设在隧道内的加密导线点处,测量后视点坐标,随后将全站仪移动至测量完成的后视点,再测量新站点坐标;而在小半径曲线段换站时,会出现以下的问题:因视线遮挡不能直接从隧道加密导线点直接观测到原站点,需经过多个原仪器托架转站才能观测到新站点;小转弯半径曲线掘进过程中全站仪有效导线距离短,换站频繁,而传统换站流程复杂繁琐,耽误施工进度;盾构小转弯半径曲线段在掘进过程中,因小半径曲线姿态控制困难,刚成型的隧道变形大,全站仪稳定性较差,因视线遮挡,缺乏检核条件,从而导致盾构姿态与成型隧道偏差较大,产生生产质量问题。
技术实现要素:
3.有鉴于现有技术的上述缺陷,本发明的目的在于提供一种基于盾构小半径转弯测量导向系统全站仪换站方法,包括以下步骤:
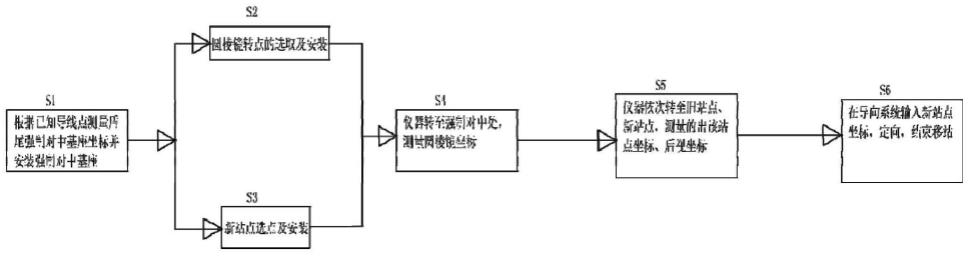
4.s1:盾构机台车尾部安装强制对中基座;
5.s2:圆棱镜转点的选点及安装:沿所述盾构机掘进方向,在成型隧道顶部安装若干个圆棱镜连接螺杆,作为隧道导线点转点;
6.s3:新站点选点及安装:沿着所述盾构机的掘进方向在所述全站仪的原站点前方选取新站点,将所述原站点作为后视点;
7.s4:圆棱镜转点坐标测量:在停机状态下,利用已知隧道导线点测量台车尾部强制对中点坐标,随后将所述全站仪移至仪器强制对中基座,选取合适的圆棱镜连接螺杆安装圆棱镜并测量该棱镜坐标;
8.s5:后视点及新站点坐标测量:分别在旧站点及新站点观测后方圆棱镜转点,采用后方交会方法定向,计算得出所述新旧站点坐标,在后视点安装后视棱镜,在所述新旧站点分别测量后视点坐标,随后将所述全站仪移动至所述的新站点处;
9.s6:在导向系统输入新站点坐标,定向,结束移站。
10.进一步的,s1中安装强制对中基座时,需要利用全站仪检测强制对中基座的通视性,将所述全站仪架设于所述仪器强制对中基座,利用所述全站仪观察所述仪器强制对中基座与所述导线点、所述圆棱镜转点之间的通视情况,若无障碍物遮挡且视野良好,则表示所述仪器强制对中基座符合通视性要求。
11.进一步的,s2中圆棱镜转点的分布要与所述强制对中基座保持通视良好。
12.进一步的,s3中的新站点要与所述圆棱镜转点保持通视良好。
13.进一步的,s4测量转点坐标时,首先在所述强制对中基座安装棱镜,利用后方已知
导线点定向测量强制对中基座棱镜坐标,随后将全站仪移至强制对中基座,以后方导线点定向,选取合适的圆棱镜连接螺杆安装圆棱镜,将所述圆棱镜转向所述全站仪,利用全站仪测量所述圆棱镜坐标。
14.进一步的,s5测量所述旧站点及新站点坐标时,首先在所述旧站点安装所述全站仪,以s4中所述圆棱镜为已知点,所述旧站点采用后方交会定向并计算得出旧站点坐标,测量后视点坐标,所述新站点测量方法同上。
15.与现有技术相比,本发明的有益之处在于:本发明的换站方法,通过在盾构机台车顶部成型隧道安装多个圆棱镜转点,在换站时,能够直接将全站仪设置在新站点直接测量坐标,避免了现有技术中因小转弯半径视线狭窄需要多个转站才能观测到新站点,而产生的工作量大、工作繁琐等诸多问题,以及解决因有限观测距离短,换站频繁产生的工作量大,影响施工进度的问题;且该圆棱镜转点能重复使用,只需根据进度拆除最后一个圆棱镜安装在最前方,其余棱镜不需改变,该方法极大的提高了在小转弯半径曲线掘进中测量换站效率,节省了盾构在小半径曲线掘进过程中因测量环节的作业时间,加快工程建设进度。
附图说明
16.图1是本发明提供的一种基于盾构小半径转弯测量导向系统全站仪换站方法的换站流程图;
17.图2是本发明一个实施例的仪器设备布置图;
18.图中:1、成型隧道;2、盾构机;3、测量导向系统激光标靶;4、一号台车;5、全站仪;51、观测视线;52、新站点;6、二号台车;7、第一后视棱镜;8、三号台车;9、一号棱镜;91、一号螺杆;10、二号棱镜;101、二号螺杆;11、第二后视棱镜;12、三号棱镜;121、三号螺杆;13、四号棱镜、131、四号螺杆;14、四号台车;15、五号台车;16、强制对中基座。
具体实施方式
19.下面对本发明的实施例作详细说明,下述的实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
20.一种基于盾构小半径转弯测量导向系统全站仪换站方法,包括以下步骤:
21.s1:盾构机台车尾部安装强制对中基座16;
22.s2:沿所述盾构机2掘进方向,在成型隧道1顶部安装若干个圆棱镜连接螺杆,作为隧道导线点转点;
23.s3:新站点选点及安装:沿着所述盾构机的掘进方向在所述全站仪的原站点前方选取新站点,将所述原站点作为后视点;
24.s4:圆棱镜转点坐标测量:在停机状态下,利用已知隧道导线点测量台车尾部强制对中点坐标,随后将所述全站仪移至仪器强制对中基座,选取合适的圆棱镜连接螺杆安装圆棱镜并测量该棱镜坐标;
25.s5:后视点及新站点坐标测量:分别在旧站点及新站点观测后方圆棱镜转点,采用后方交会方法定向,计算得出所述新旧站点坐标,在后视点安装后视棱镜,在所述新旧站点分别测量后视点坐标,随后将所述全站仪移动至所述的新站点处;
26.s6:在导向系统输入新站点坐标,定向,结束移站。
27.进一步的,s1中安装强制对中基座时,需要利用全站仪检测强制对中基座的通视性,将所述全站仪架设于所述仪器强制对中基座,利用所述全站仪观察所述仪器强制对中基座与所述导线点、所述圆棱镜转点之间的通视情况,若无障碍物遮挡且视野良好,则表示所述仪器强制对中基座符合通视性要求。
28.进一步的,s2中圆棱镜转点的分布要与所述强制对中基座保持通视良好。
29.进一步的,s3中的新站点要与所述圆棱镜转点保持通视良好。
30.进一步的,s4测量转点坐标时,首先在所述强制对中基座安装棱镜,利用后方已知导线点定向测量强制对中基座棱镜坐标,随后将全站仪移至强制对中基座,以后方导线点定向,选取合适的圆棱镜连接螺杆安装圆棱镜,将所述圆棱镜转向所述全站仪,利用全站仪测量所述圆棱镜坐标。
31.进一步的,s5测量所述旧站点及新站点坐标时,首先在所述旧站点安装所述全站仪,以s4中所述圆棱镜为已知点,所述旧站点采用后方交会定向并计算得出旧站点坐标,测量后视点坐标,所述新站点测量方法同上。
32.全站仪的具体使用及测量原理为现有技术,首次安装强制对中基座时,应仔细观测前后视线区域,选择观测视野最有利的位置安装,此装置可永久使用。在测量强制对中基座坐标时,应保证是在停机状态下。
33.圆棱镜选点为此发明方法实施的重点,尽可能躲不住点位。在选点时,要考虑与强制对中基座以及新站点的通视情况,以及观测有效距离,最好选择在管片中部,以及考虑点与点间的角度与距离,使点位分布合理,不可与站点形成一条直线。
34.在新旧站点架设仪器时,可选用三个圆棱镜转点作为后方交会定向点,其余圆棱镜作为检核点,也可测量后视棱镜坐标,与前次作对比,形成新的检核条件。
35.在完成新站点坐标测量后,可选用原后视棱镜作为导向系统的定向点,此法加长后视定向距离,增加测量的可靠性。
36.因盾构在小转弯半径曲线掘进中,有限观测距离短,可直接安装新站点,测量圆棱镜转点完成全站仪移站,在下次需要换站时再从后方导线点往新站点复测,重复上述步骤s1、s2、s3、s4和s5;经过多次验证,在小转弯半径掘进中,可直接利用该方法换站,经对比掘进姿态在允许值范围内。
37.经过多次使用,换站时间可以控制在1h以内,极大的提高了效率。
38.实施例:
39.如图2所示,为本发明在是应用时的一个仪器装置布置示意图,在成型隧道1内设置一号台车4、二号台车6、三号台车8、四号台车14和五号台车15,成型隧道1的一端设置有测量导向系统激光标靶3,成型隧道1的另一端设置有强制对中基座16,成型隧道1顶部还设置有一号螺杆91、二号螺杆101、三号螺杆121和四号螺杆131,一号螺杆91上连接有一号棱镜9,二号螺杆101上连接有二号棱镜10,三号螺杆121上连接有三号棱镜121,四号螺杆131上连接有四号棱镜13,成型隧道1底部设置第一后视棱镜7和第二后视棱镜11,成型隧道底部设置有新站点和旧站点。
40.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员
依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的试验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1