一种基于异形阵的MUSIC与和差波束联合测角方法与流程
一种基于异形阵的music与和差波束联合测角方法
技术领域
1.本发明属于天基信息获取领域,涉及一种基于异形阵的music与和差波束联合测角方法。
背景技术:
2.现代信息化战争中,战场边界空前扩展,渗透于陆、海、空、天、网、电磁等六大领域,同时态势瞬息万变,争夺信息权的战法和范式推陈出新,这对军事装备的功能模式提出更高要求,特别是对天基装备的技术要求,呈现信息化、软件化、智能化、网络化、一体化等新特点,需要发展和强化多样化探测手段并融合处理的能力。基于以上对天基装备发展提出的新要求以及面临新挑战,未来新一代卫星载荷需要同时具备搜索、发现、识别、对抗与打击等多种不同的功能,并在轨自主运行与处理,以满足战场态势瞬息万变,任务不断变化应对需求。按传统的单个功能配置单独天线的使用方法,会引起天线数量众多、平台拥挤、电磁兼容等问题。因此,雷达、通信及电子战设备天线孔径的综合与共享,是解决上述问题的一个有效途径。采用具备超宽带宽角扫描的相控阵天线阵列,由于其可以灵活地进行子阵的划分、组合和拆分,可以同时形成多个指向和宽度不同的波束,是实现多种功能共享孔径的有效途径。
3.电子侦察系统需要工作在超宽带接收状态(如2~18ghz),考虑低轨500km 的轨道高度,以能侦收到绝大多数重点通信和雷达辐射源为准则,电子侦察单天线尺寸大约需要0.04m
×
0.04m(8
×
8规模)。工作在14~18ghz雷达探测系统为实现米级分辨率成像,大约需要3.4m
×
0.75m的天线规模。为实现雷达探测系统和电子侦察系统共享孔径,在雷达探测系统天线的方位向和距离向,布设数个0.04m
×
0.04m模块化超宽带宽角扫描子阵,侦察子阵相位中心间隔 0.04m,18ghz信号波长为0.016m,侦察子阵间距和高频18ghz波长比为2.5,构成了均匀稀疏阵列,采用常规2d-music进行测角,虽然测角分辨率高测角精度优良,但大规模矩阵运算和二维谱峰搜索会带来繁重的运算负担,并且产生测角模糊;采用相控阵子阵级和差波束测角,虽然无角度模糊问题,但测角精度差。因此,天基多功能共孔径载荷系统,缺乏一种无角度模糊、运算复杂度较低的二维精确测角手段。
技术实现要素:
4.本发明的目的在于:克服现有技术的不足,提供一种基于异形阵的music 与和差波束联合测角方法,既能避免大规模矩阵运算和二维谱峰搜索带来的繁重运算负担及产生的测角模糊问题,又能克服常规二维和差波束带来的测角精度低的缺陷。
5.本发明的技术解决方案是:一种基于异形阵的music与和差波束联合测角方法,包括:
6.构建模块化超宽带宽角扫描子阵;分别编号为1,2,
…
,m,m+1,
…
, n,n+1;m和n均为正整数;
7.建立空间坐标系oxyz,目标来波方向位于x,y和z三轴正半轴构成的立体空间内;
定义俯仰角θ为来波方向与xoy平面的夹角;方位角为来波方向在xoy平面的投影与x轴的夹角,α为来波方向与z轴的夹角,β为目标辐射源与x轴的夹角,γ为目标辐射源与y轴的夹角;
8.选取四个模块化超宽带宽角扫描子阵,获得目标辐射源无角度模糊的和θ的初步粗估计值;选取m个模块化超宽带宽角扫描子阵,计算得到目标辐射源与y轴存在角度模糊的夹角精确估计值γ
ζ
;选取n-m个模块化超宽带宽角扫描子阵,计算得到目标辐射源与x轴存在角度模糊的夹角精确估计值β
ξ
;
9.基于目标辐射源无角度模糊的和θ的初步粗估计值以及目标辐射源与x、 y轴的夹角,计算得到目标辐射源与x轴夹角β和目标辐射源与y轴夹角γ无角度模糊下的精确估计;
10.基于得到的目标辐射源与x轴夹角β和目标辐射源与y轴夹角γ无角度模糊下的精确估计值,求得α无角度模糊的精确估计;
11.计算得到方位角和俯仰角θ'无角度模糊的精确估计值。
12.每个模块化超宽带宽角扫描子阵由p
×
p个超宽带宽角扫描平面相控阵天线单元组成;多个模块化超宽带宽角扫描子阵构成“l+十”异形阵列,其中p为正整数。
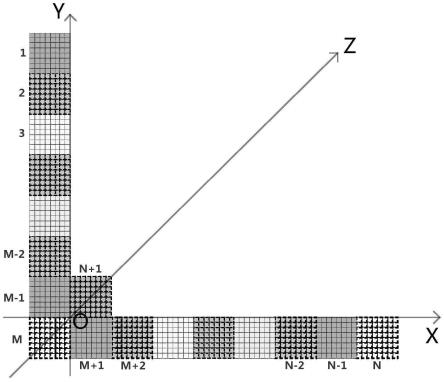
13.所述“l+十”异形阵列的构建形式为:所述“l+十”异形阵列处于xoy平面内,以o点为原点,位于第二象限的模块化超宽带宽角扫描子阵编号为m-1,沿y轴正方向顺序编号为m-2,m-3,
…
2,1,位于第三象限的模块化超宽带宽角扫描子阵编号为m,位于第四象限的模块化超宽带宽角扫描子阵编号为m+1,沿x轴正方向顺序编号为m+1,m+2
…
,n-1,n;位于第一象限的模块化超宽带宽角扫描子阵编号为n+1。
14.选取四个模块化超宽带宽角扫描子阵,获得目标辐射源无角度模糊的和θ的初步粗估计值,包括:选取编号为m,m-1,m+1,n+1的模块化超宽带宽角扫描子阵,采用阵列二维和差波束测角算法,获得目标辐射源无角度模糊的和θ的初步粗估计值。
15.选取m个模块化超宽带宽角扫描子阵,计算得到目标辐射源与y轴夹角γ
ζ
,包括:选取编号1,2,
…
,m的模块化超宽带宽角扫描子阵,采用一维均匀稀疏线阵music算法,求得目标辐射源与y轴夹角γ
ζ
,求得的γ
ζ
为存在角度模糊的精确估计,ζ为大于等于1的正整数。
16.选取n-m个模块化超宽带宽角扫描子阵,计算得到目标辐射源与x轴夹角β
ξ
,包括:选取编号m,m+1,m+2
…
,n-1,n模块化超宽带宽角扫描子阵,采用一维均匀稀疏线阵music算法,求得目标辐射源与x轴夹角β
ξ
,求得的β
ξ
为存在角度模糊的精确估计,ξ为大于等于1的正整数。
17.所述计算得到目标辐射源与x轴夹角β和目标辐射源与y轴夹角γ无角度模糊下的精确估计值为:
[0018][0019][0020]
所述计算得到夹角α无角度模糊的精确估计值α
′
为:
[0021][0022]
计算得到无角度模糊的方位角精确估计值和俯仰角精确估计值θ'为:
[0023][0024]
θ'=sin-1
(cosα
′
)。
[0025]
所述n≥2m-1,且m≥4。
[0026]
本发明与现有技术相比的优点在于:
[0027]
本发明针对天基多功能共孔径载荷系统对目标辐射源高精度测向定位的能力需求,提出了由模块化超宽带宽角扫描子阵构成的“l+十”型特殊阵列,通过联合运用相控阵子阵级二维和差波束和两次一维muisc算法测角,实现了天基多功能共孔径载荷系统对目标辐射源的二维无角度模糊、低复杂度、精确测角能力,测角精度由常规和差波束1/20子阵波束宽度水平提升至1/1000子阵波束宽度。该发明提出的方法,既避免了使用均匀稀疏阵列 2d-music算法获取目标辐射源方位角和俯仰角需要大规模矩阵运算和二维谱峰搜索带来的繁重运算负担及产生的测角模糊问题,又克服了常规二维和差波束测角带来的精度低的缺陷。综上所述,该发明提出的方法测角精度高、测角结果无模糊、算法运算量小,具有很强的创新性和实用性,有效提升了天基多功能共孔径载荷系统对地侦察监视的能力和水平。
附图说明
[0028]
图1是基于异形阵的music与和差波束联合测角阵列配置图;
[0029]
图2是基于异形阵的music与和差波束联合测角流程框图;
[0030]
图3是基于异形阵的music与和差波束联合测角实施例阵列配置图;
[0031]
图4是基于music算法对γ进行估计的空间伪谱图;
[0032]
图5是基于music算法对β进行估计的空间伪谱图;
具体实施方式
[0033]
本发明一种基于异形阵的music(multiple signal classification)与和差波束联合测角方法,步骤实现如下:
[0034]
如图1和2所示,每个模块化超宽带宽角扫描子阵由p
×
p个超宽带宽角扫描平面相控阵天线单元组成,分别编号为1,2,
…
,m,m+1,
…
,n,n+1;多个模块化超宽带宽角扫描子阵构成“l+十”异形阵列,其中p、m和n均为正整数;
[0035]
建立空间坐标系oxyz,目标来波方向位于x,y和z三轴正半轴构成的立体空间内;定义俯仰角θ为来波方向与xoy平面的夹角;方位角为来波方向在xoy平面的投影与x轴的夹角,α为来波方向与z轴的夹角,β为目标辐射源与x轴的夹角,γ为目标辐射源与y轴的夹角;所述“l+十”异形阵列处于xoy平面内,以o点为原点,位于第二象限的模块化超宽带宽角扫描子阵编号为m-1,沿y轴正方向顺序编号为m-2,m-3,
…
2,1,位于第三象限的模块化超宽
带宽角扫描子阵编号为m,位于第四象限的模块化超宽带宽角扫描子阵编号为m+1,沿x轴正方向顺序编号为m+1,m+2,
…
,n-1,n;位于第一象限的模块化超宽带宽角扫描子阵编号为n+1。n≥2m-1,m≥4。
[0036]
步骤1.基于编号m,m-1,m+1,n+1的模块化超宽带宽角扫描子阵,采用“十”型阵列二维和差波束测角算法,获得无角度模糊的和θ的初步粗估计。
[0037]
采用“十”型阵列二维和差波束测角算法对目标方位角和俯仰角θ进行初步粗估计,方法如下:
[0038]
编号m-1,n+1,m+1,m四个子阵的相位中心坐标分别表示为d
m-1
,d
n+1
, d
m+1
和dm,如下式所示
[0039][0040]
假设有一子阵的中心位于坐标原点处,则此子阵的接收信号可以表示为p0,则根据空间波程差的理论可知,编号m-1,n+1,m+1,m四个子阵相位中心接收信号可以表示为如下形式:
[0041][0042]
上式可改写为
[0043][0044]
(
·
)h表示共轭转置。由上式可知,编号m-1,n+1,m+1,m四个子阵相位中心的导向矢量可以表示为:
[0045][0046]
假设当前波束指向为那么此时对应的权矢量为编号m- 1,n+1,m+1,m四个子阵相位中心的输出如下式所示:
[0047][0048]
其中,v0=sinθ-sinθ0。
[0049]
由和、方位差、俯仰差波束的构成方式可知,和波束为编号m-1,n+1, m+1,m子阵输出之和,即:
[0050][0051]
方位差波束为编号m-1,m的子阵接收信号输出之和减去n+1,m+1的子阵接收信号输出之和:
[0052][0053]
俯仰差波束为编号m-1,n+1的子阵接收信号输出之和减去m,m+1的子阵接收信号输出之和:
[0054][0055]
由式(6)和(8)可得,俯仰差波束与和波束的比值可表示为:
[0056]
[0057]
则目标的俯仰角θ可以表示为:
[0058][0059]
其中,imag(
·
)表示取复信号的虚部,是俯仰维角误差曲线的斜率。
[0060]
由式(6)和(7)可得,方位差波束与和波束的比值可表示为:
[0061][0062]
则目标的方位角可以表示为:
[0063][0064]
式中,表示方位维鉴角曲线斜率。
[0065]
步骤2.基于y轴上编号1,2,
…
,m模块化超宽带宽角扫描子阵,采用一维均匀稀疏线阵music算法,求得目标辐射源与y轴夹角,求得的γ
ζ
为存在角度模糊的精确估计,ζ为大于等于1的正整数;
[0066]
采用一维均匀稀疏线阵music算法对目标来波方向与y轴的夹角γ进行估计,方法如下:
[0067]
窄带远场平面波信源s(t)从γ方向入射至编号1,2,
…
,m子阵构成的一维均匀稀疏线阵,子阵间距为b/2,以子阵m的相位中心作为参考,则第l(l=1, 2,
…
,m)个子阵在采样时刻t的接收信号表示为
[0068]
x
l
(t)=w(γ)s(t)+n
l
(t),l=1,2,
…
,m
ꢀꢀ
(13)
[0069]
其中,w(γ)为导向矢量,w(γ)=[1 exp(-jθ)
ꢀ…ꢀ
exp(-j(m-1)θ)]
t
,(
·
)
t
表示矩阵转置操作,n
l
(t)表示t时刻上第l个子阵接收到的高斯白噪声,其均值为0,方差为(噪声功率),且与信号部分不相关。
[0070]
将式(13)改写成更紧凑的矢量表达式
[0071]
x(t)=w(γ)s(t)+n(t)
ꢀꢀ
(14)
[0072]
其中,x(t)=[x1(t),
…
,xm(t)]
t
,n(t)=[n1(t),
…
,nm(t)]
t
。
[0073]
对阵列输出矩阵x(t)求取自相关,并对其进行特征分解
[0074][0075]rs
为信号协方差矩阵,噪声协方差矩阵为σ=diag(κ1,κ2,
…
κm)为特征值
矩阵,diag(表示将矢量进行对角化操作。在单入射信号情形下,u=[e1,e2,
…
,em]=[usun]为特征矢量矩阵,us=[e1], un=[e2,e3,
…
,em]分别指代信号和噪声子空间,γ可通过对下式(16)所示的空间伪谱函数进行极大值搜索,找出极大值对应的角度就是γ的高精度但存在角度模糊的估计值。
[0076][0077]
步骤3.基于x轴上编号m,m+1,
…
,n模块化超宽带宽角扫描子阵,采用一维均匀稀疏线阵music算法,求得目标辐射源与x轴夹角,求得的β
ξ
为存在角度模糊的精确估计,ξ为大于等于1的正整数;
[0078]
采用一维均匀稀疏线阵music算法对目标来波方向与x轴的夹角β进行估计的方法与步骤2中对γ的估计方法相同,同理可得出高精度但存在角度模糊β的估计值。
[0079]
步骤4.基于步骤1得出的无角度模糊的和θ的初步粗估计,由式(17)、 (18)求得β和γ无角度模糊的精确估计;
[0080][0081][0082]
步骤5.基于步骤4得到β和γ无角度模糊的精确估计,由式(20)求得α无角度模糊的精确估计。
[0083]
(cosα,cosβ,cosγ)为目标来波方向的空间余弦,存在如下式(19)关系:
[0084]
cos2α+cos2β+cos2γ=1
ꢀꢀ
(19)
[0085]
则,
[0086][0087]
步骤6.基于步骤4和5得到的α、β和γ无角度模糊的精确估计,由、式(22)、(23)求得方位角和俯仰角θ'无角度模糊的精确估计。
[0088]
依据空间几何关系可知:
[0089][0090]
则,
[0091][0092]
θ'=sin-1
(cosα)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(23)
[0093]
下面结合附图和具体实施例对本发明进行详细说明。
[0094]
实施例:
[0095]
给出了一种基于异形阵的music与和差波束联合测角方法的一个实现案例。具体
按如下步骤实施,如图3所示:由8
×
8个超宽带宽角扫描平面相控阵天线单元,构成尺寸为0.04m
×
0.04m、工作频段为2ghz≤f≤18ghz的模块化超宽带宽角扫描子阵,编号为1,2,
…
,8,9,
…
,15,16的模块化超宽带宽角扫描子阵构成特殊的“l+十”异形阵列。
[0096]“l+十”异形阵列处于xoy平面内,“l+十”异形阵列处于xoy平面内,由位于第二象限的编号1,2,
…
,7(沿y轴呈均匀稀疏排列),位于第三象限的编号8,位于第四象限的编码9,10
…
,15(沿x轴呈均匀稀疏排列)和位于第一象限的编号16模块化超宽带宽角扫描子阵构成。
[0097]
假定工作频率为18ghz的远场窄带平面辐射源,信噪比10db,快拍数 1024,以方位角俯仰角θ=5
°
的方向入射至该“l+十”异形阵列,由空间几何约束关系可知,α=85
°
,β=11.169
°
,γ=80.0384
°
。
[0098]
步骤1.基于编号7,8,9,16的模块化超宽带宽角扫描子阵,采用“十”型阵列二维和差波束测角算法对目标方位角和俯仰角θ进行初步粗估计。子阵7,8,9,16波束输出之和,得到和波束;子阵7,8波束输出之和减去子阵9,16波束输出之和,得到方位差波束;子阵7,16波束输出之和减去子阵 8,9波束输出之和,得到俯仰差波束。假定波束指向方位俯仰θ0=0
°
,测得目标方位角俯仰角θ=6.2833
°
。18ghz时,单个模块化超宽带宽角扫描子阵的波束宽度约为21
°
,方位和俯仰测量的角度误差约为波束宽度的1/20,测角误差较大。
[0099]
步骤2.基于y轴上编号1,2,
…
,8的模块化超宽带宽角扫描子阵,子阵间相位中心间距约为0.04m,为18ghz频率的2.5倍个波长,采用一维均匀稀疏线阵music算法,求得目标来波方向与y轴的夹角,存在角度模糊的精确估计γ
″′
,分别为-42.984
°
,-15.374
°
,8.717
°
,34.625
°
和80.019
°
。
[0100]
步骤3.基于x轴上、编号8,9,
…
,15模块化超宽带宽角扫描子阵,子阵间相位中心间距约为0.04m,为18ghz频率的2.5倍个波长,采用一维均匀稀疏线阵music算法,求得目标来波方向与x轴的夹角,存在角度模糊的精确估计β
″′
,分别为-39.771
°
,-12.888
°
,11.164
°
和37.61
°
。
[0101]
步骤4.如图4、5所示,基于步骤1得出的方位角俯仰角θ=6.2833
°
初步粗估计,基于式(17)、(18)代价函数寻优,求得无角度模糊β=11.164
°
,γ=80.019
°
的精确估计。
[0102]
步骤5.基于步骤4得到的无角度模糊β=11.164
°
、γ=80.019
°
的精确估计,由式(20)求得无角度模糊α=85.0493
°
精确估计。
[0103]
步骤6.基于步骤4和5得到的无角度模糊α=85.0493
°
、β=11.164
°
和γ=80.019
°
精确估计,由式(22)、(23)求得无角度模糊方位角俯仰角θ'=4.9507
°
精确估计。由此可见,方位角的估计误差为0.0188
°
,俯仰角的估计误差为0.0493
°
,角度估计误差可达子阵波束宽度的1/1000~2/1000,远远超出了和差波束1/20子阵波束宽度测角误差的水平。
[0104]
本实施案例仅仅是本发明的一种具体实现方式,可根据系统对目标辐射源侦察性能和测向定位的精度要求,选择工作在不同频段、不同类型的平面相控阵天线单元,构成模
块化超宽带宽角扫描子阵的单元数目可增加或者减小,构成特殊的“l+十”异形阵列的子阵数目可增加或者减少。
[0105]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1