一种医用止血钳生产用工艺检测装置的制作方法
1.本发明涉及医疗用品生产技术领域,特别涉及一种医用止血钳生产用工艺检测装置。
背景技术:
2.止血钳是一种通过夹住血管实现血液阻断的外科手术器械;其外形如说明书附图图8所示;止血钳的使用原理如同夹子一样夹住病患的血管或是皮毛等;抢救病人在出血的情况下,服入止血药后,用止血钳夹住血管大动脉,不让血流出;
3.止血钳有大、小、有齿、无齿、直形、弯形之分,根据不同操作部位选用不同类型的止血钳;手柄旁边的齿有助于使止血钳在夹持物体时固定,防止脱落;
4.通过上述使用方式可得知,止血钳的核心质量指标即为其钳口部的公差;如果实际公差尺寸与理论尺寸不符,则无论其过大或过小都容易对病患的血管造成适配不良,甚至可能影响到手术作业;
5.然而,现有的止血钳多为车制而成,甚至是人工钳制而成,其对于质量的把控和工艺的检测并无严格的检测与衡量标准。
6.为此,提出一种医用止血钳生产用工艺检测装置。
技术实现要素:
7.有鉴于此,本发明实施例希望提供一种医用止血钳生产用工艺检测装置,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择;
8.本发明实施例的技术方案是这样实现的:一种医用止血钳生产用工艺检测装置,包括工作台和用于控制所有电器元件的控制器,所述工作台的顶部安装有调节机构;
9.所述调节机构包括驱动组件和钳固组件;
10.所述钳固组件用于钳固止血钳的握把,并模拟人手对止血钳进行加紧与放松;
11.所述驱动组件存在三个不同轴向的线性自由度,用于驱动所述钳固组件模拟人手臂相对于止血钳的不同操作角度;
12.所述工作台的顶部安装有测试机构,所述测试机构用于模拟人体血管及其分布特征,并负责检测止血钳在工作状态下的使用情况。
13.作为本技术方案的进一步优选的:所述工作台的顶部通过固定架对称安装有测试机构。
14.作为本技术方案的进一步优选的:所述钳固组件包括顶台、两个第一伺服电缸及与其活塞杆固定连接的电动夹具;
15.所述第一伺服电缸相对安装于所述顶台的内侧壁,所述电动夹具滑动连接于所述顶台的内侧壁;
16.所述电动夹具用于钳固止血钳的握把。
17.作为本技术方案的进一步优选的:所述驱动组件包括机架、三个伺服电机及与其
输出轴固定连接的蜗杆,与所述蜗杆啮合的蜗轮,三个直径不同的套轴、三个立架和铰接于所述立架上部的铰臂;
18.所述伺服电机环形阵列式布置于所述机架的外表面,三个蜗轮的旋转轴为同一个,且分别通过一个所述套轴转动连接于所述机架;
19.三个所述套轴上下布置,且最大的所述套轴位于最下面,最小的所述套轴位于最上面;
20.三个所述套轴均为空心轴,且最上面的所述套轴套接于中部的所述套轴的内侧壁,中部的所述套轴套接于最下面的所述套轴的内侧壁;
21.三个所述套轴的上部均固定连接有一所述立架,三个所述立架呈环形阵列式布置于所述蜗轮的中轴线;
22.所述铰臂的上部铰接于所述顶台的外表面。
23.作为本技术方案的进一步优选的:所述测试机构包括架体、两个第二伺服电缸及摇块组件和滑动架;
24.所述第二伺服电缸对称安装于所述架体的前表面,所述滑动架滑动连接于所述架体的前表面;
25.所述摇块组件为两个相互铰接的实体组成,其中一个实体铰接于所述架体的前表面,另一个实体铰接于所述滑动架的外表面;
26.两个所述滑动架中,一个所述滑动架安装有不少于三个的风速传感器,另一个所述滑动架安装有数量与所述风速传感器相同的气泵;
27.每个所述气泵的出气口均连通有一空心皮管,所述空心皮管的另一端与所述风速传感器的检测端连通。
28.作为本技术方案的进一步优选的:每组所述空心皮管的直径和厚度均不相同。
29.与现有技术相比,本发明的有益效果是:本发明通过调节机构及调节机构之间的机械联动及相互配合,在实际使用的过程中不仅能够实现模拟人手对止血钳的各种作业角度,且能够在此基础上对其不同作业条件下进行公差工艺检测,能够有效解决传统技术中止血钳无严格的检测与衡量标准的技术缺陷。
附图说明
30.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
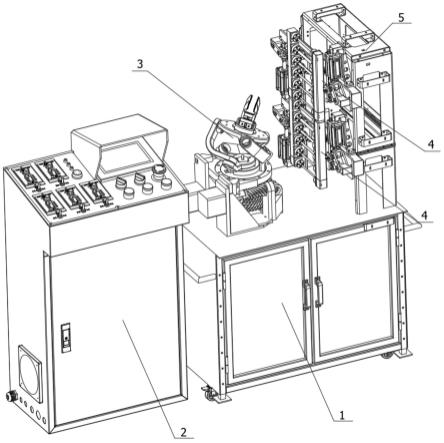
31.图1为本发明的一视角立体结构示意图;
32.图2为本发明的另一视角立体结构示意图;
33.图3为本发明的工作台、调节机构和测试机构立体结构示意图;
34.图4为本发明的调节机构一视角立体结构示意图;
35.图5为本发明的调节机构另一视角立体结构示意图;
36.图6为本发明的测试机构立体结构示意图;
37.图7为本发明的图7的a区放大视角立体结构示意图;
38.图8为止血钳示意图。
39.附图标记:1、工作台;2、控制器;3、调节机构;301、机架;302、伺服电机;303、蜗杆;304、蜗轮;305、套轴;306、立架;307、铰臂;308、顶台;309、第一伺服电缸;310、电动夹具;4、测试机构;401、架体;402、第二伺服电缸;403、摇块组件;404、滑动架;405、风速传感器;406、空心皮管;407、气泵;5、固定架。
具体实施方式
40.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
41.需要注意的是,术语“第一”、“第二”、“对称”、“阵列”等仅用于区分描述与位置描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“对称”等特征的可以明示或者隐含地包括一个或者更多个该特征;同样,对于未以“两个”、“三只”等文字形式对某些特征进行数量限制时,应注意到该特征同样属于明示或者隐含地包括一个或者更多个特征数量;
42.在本发明中,除非另有明确的规定和限定,“安装”、“连接”、“固定”等术语应做广义理解;例如,可以是固定连接,也可以是可拆卸连接,或一体成型;可以是机械连接,可以是直接相连,可以是焊接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据说明书附图结合具体情况理解上述术语在本发明中的具体含义。
43.实施例
44.请参阅图1-8,本发明提供一种技术方案:一种医用止血钳生产用工艺检测装置,包括工作台1和用于控制所有电器元件的控制器2,工作台1的顶部安装有调节机构3;
45.请参阅图4:调节机构3包括驱动组件和钳固组件;
46.钳固组件用于钳固止血钳的握把,并模拟人手对止血钳进行加紧与放松;
47.驱动组件存在三个不同轴向的线性自由度,用于驱动钳固组件模拟人手臂相对于止血钳的不同操作角度;
48.其中,钳固组件包括顶台308、两个第一伺服电缸309及与其活塞杆固定连接的电动夹具310;第一伺服电缸309相对安装于顶台308的内侧壁,电动夹具310滑动连接于顶台308的内侧壁;
49.电动夹具310用于钳固止血钳的握把;
50.使用时,工作人员需将接受检测的止血钳握把配设于两个电动夹具310内,控制电动夹具310将其加紧;
51.因两个电动夹具310的位置相对,故上述第一伺服电缸309的位置描述意指相对安装,即两个第一伺服电缸309同步伸出或缩回,即可控制止血钳进行放松或加紧;
52.其中,驱动组件包括机架301、三个伺服电机302及与其输出轴固定连接的蜗杆303,与蜗杆303啮合的蜗轮304,三个直径不同的套轴305、三个立架306和铰接于立架306上部的铰臂307;
53.伺服电机302环形阵列式布置于机架301的外表面,三个蜗轮304的旋转轴为同一
个,且分别通过一个套轴305转动连接于机架301;
54.三个套轴305上下布置,且最大的套轴305位于最下面,最小的套轴305位于最上面;
55.三个套轴305均为空心轴,且最上面的套轴305套接于中部的套轴305的内侧壁,中部的套轴305套接于最下面的套轴305的内侧壁;
56.三个套轴305的上部均固定连接有一立架306,三个立架306呈环形阵列式布置于蜗轮304的中轴线;
57.铰臂307的上部铰接于顶台308的外表面;
58.当三个伺服电机302驱动各自的蜗杆303啮合于蜗轮304时,三组蜗轮304即可通过各自的套轴305旋转带动立架306控制与之相对的铰臂307进行角度调节,进而控制顶台308的角度调节;
59.其中,因三个套轴305均为空心轴,故三个伺服电机302无论各自是否正转或反转,或是具有转速差,均不会影响到其余的套轴305进行传动;
60.故三个伺服电机302按照相应的旋转角度或转速,即可控制顶台308指定升降及倾斜至一定的空间位置及其角度;
61.因此,本装置可通过控制器2预设三个伺服电机302按照指定驱动模式进行输出并将其作为预设值储存,即可模拟实际人手对止血钳的操作姿势、角度等环境要素,配合测试机构4进行全面实际化检测;
62.请参阅图6和图7,其中:工作台1的顶部通过固定架5对称安装有测试机构4,测试机构4用于模拟人体血管及其分布特征,并负责检测止血钳在工作状态下的使用情况;
63.测试机构4包括架体401、两个第二伺服电缸402及摇块组件403和滑动架404;
64.第二伺服电缸402对称安装于架体401的前表面,滑动架404滑动连接于架体401的前表面;
65.摇块组件403为两个相互铰接的实体组成,其中一个实体铰接于架体401的前表面,另一个实体铰接于滑动架404的外表面;
66.两个滑动架404中,一个滑动架404安装有不少于三个的风速传感器405,另一个滑动架404安装有数量与风速传感器405相同的气泵407;
67.每个气泵407的出气口均连通有一空心皮管406,空心皮管406的另一端与风速传感器405的检测端连通;
68.测试机构4的理论检测原理:通过调节机构3模拟人手操作止血钳,控制止血钳钳固每个空心皮管406;期间气泵407不断充气以模拟血管流动,如果当前止血钳的公差尺寸合格,则风速传感器405不会接受到风气,即可通过控制器2进行交互,判定当前止血钳工艺合格;反之如果风速传感器405接受到风气,即可通过控制器2进行交互,判定当前止血钳工艺不合格;
69.其中血管的具体流通速度可由气泵407进行控制,具体可通过预设值相应模拟不同种类的血管;
70.测试机构4的实际检测原理:在上述理论检测原理的基础上,考虑到人体血管的分部不可能是如图6所示的直线型;具有弧度的血管因曲率的变化仍不能有效检测到止血钳的公差工艺容错率,因此需要下述部件进行相应模拟变化,以测试止血钳的容错率;
71.其中,第二伺服电缸402驱动摇块组件403控制滑动架404进行滑移,摇块组件403与滑动架404连接的实体负责传递动能,另一个实体负责消除此机构多余的自由度;
72.两个滑动架404之间调节不同的间距,即可控制空心皮管406弯折,以模拟出真实血管的弧度;
73.其中具体的,上述模拟真实血管的弧度及模拟血管的流量参数,本装置将人体不同的血管参数列为预设值,并通过控制器2进行储存;当实际测试的过程中,通过对不同的预设参数进行多次检测,即可实现对人体所有血管进行模拟测试,以完美提高止血钳的工艺检测性能。
74.本实施例中,具体的:每组空心皮管406的直径和厚度均不相同,用于模拟不同壁厚的血管。
75.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1