用于在飞行器飞行期间自动估计飞行器的速度的系统和方法与流程
1.本发明涉及一种用于实时自动估计飞行器、尤其是运输机的至少一个速度的系统和方法。
背景技术:
2.通常,为了确定飞行器在飞行期间的速度,尤其是马赫数或v
cas
类型的校正速度或修正速度(cas表示“校正空速”),使用皮托探针进行总空气压力的测量,使用专用传感器进行静空气压力的测量。然后使用这些测量结果利用标准公式计算速度。因此这种计算需要测量总空气压力。由此,如果期望免除使用传感器(总空气压力传感器或皮托探针)以减轻重量并降低相关成本和处理链的复杂性,则这种标准解决方案不再能够确定飞行器的空速。而且,如果期望提高标准总压力测量的可用性和可靠性,例如以便即使在这些传感器发生故障的情况下提高控制的自主性,期望具有可用的不同测量或估计。
3.因此,本发明涉及一种用于在飞行器飞行期间无需使用总压力测量而自动估计飞行器的至少一个速度的系统。
技术实现要素:
4.本发明的主题是一种用于在飞行器飞行期间无需使用总压力测量而自动估计飞行器、尤其是运输机的速度的系统。
5.根据本发明,所述系统包括:
[0006]-确定模块,该确定模块被配置成确定表示施加在飞行器的至少一个控制面上的力的至少一个量;
[0007]-计算模块,该计算模块被配置成至少基于由确定模块确定的一个或多个量来计算飞行器的至少一个速度;
[0008]-发送模块,该发送模块被配置成将由计算模块计算出的飞行器的一个或多个速度发送至用户设备。
[0009]
表示力的一个或多个量各自对应于作动器的两个液压腔室之间测得的压力差,该作动器旨在使飞行器的控制面偏转。
[0010]
估计系统进一步包括被配置成从飞行器采集多个飞行参数的采集模块,
[0011]
由计算模块基于总体压力差或单独的压力差以及多个飞行参数使用函数来计算飞行器的一个或多个速度,其中一个或多个速度是一个或多个压力差的函数,该函数具有以下表达式:
[0012]vcas
=f(θ),
[0013]
其中,
[0014]vcas
对应于所述要确定的一个或多个速度,
[0015]-θ对应于参数向量,该参数向量包括由确定模块确定的总体压力差或单独的压力差以及由测量模块测得的多个飞行参数。
[0016]
基于神经网络来计算一个或多个速度,其中要计算的一个或多个速度对应于神经网络的输出层,并且其中总体压力差或单独的压力差以及多个飞行参数对应于神经网络的输入层,神经网络包括离线确定的固定突触权重。
[0017]
因此,借助于确定至少一个控制面上的力,可以无需使用总压力而估计飞行器的速度。估计速度可以通过飞行器的飞行控制计算机尤其在指导飞行器的规则中使用。
[0018]
在一个特定实施例中,确定模块还包括被配置成从作动器或从每个作动器采集单独的压力差的至少一个采集子模块,单独的压力差由每个作动器的压力差测量传感器测量。
[0019]
有利地,确定模块包括被配置成对所采集的一个或多个单独的压力差进行滤波的滤波子模块。
[0020]
在一个特定实施例中,确定模块另外还包括确定子模块,该确定子模块被配置成通过计算单独的压力差的平均值、或者实际上是中值、或者实际上是加权平均值来确定总体压力差。
[0021]
在非限制性示例中,参数向量具有以下形式:
[0022]
θ=[δp;ps;α;conf;p;δ
p
],
[0023]
其中:
[0024]-δp对应于由确定模块确定的总体压力差或单独的压力差,
[0025]-ps对应于静空气压力,
[0026]-α对应于飞行器的迎角,
[0027]-conf对应于飞行器的缝翼和襟翼的空气动力配置,
[0028]-p对应于飞行器的滚转角,
[0029]-δ
p
对应于控制面的偏转角或连接到飞行器控制面的作动器的轴的位置的偏转角。
[0030]
本发明还涉及一种用于在飞行器飞行期间自动估计飞行器的速度的方法。
[0031]
根据本发明,该方法至少包括以下步骤:
[0032]-由确定模块实施的确定步骤,该步骤在于确定表示施加在飞行器的至少一个控制面上的力的至少一个量,表示力的一个或多个量各自对应于作动器的两个液压腔室之间测得的压力差,该作动器旨在使飞行器的控制面偏转;
[0033]-由计算模块实施的计算步骤,该步骤在于至少基于由确定模块确定的一个或多个量来计算飞行器的至少一个速度;
[0034]-由发送模块实施的发送步骤,该步骤在于将在计算步骤中计算出的飞行器的一个或多个速度发送至用户设备。
[0035]
该估计方法进一步包括由采集模块实施的采集步骤,该步骤在于从飞行器采集多个飞行参数。
[0036]
由计算步骤基于压力差以及多个飞行参数使用函数来计算飞行器的一个或多个速度,其中一个或多个速度是一个或多个压力差的函数,该函数具有以下表达式:
[0037]vcas
=f(θ),
[0038]
其中,
[0039]-v
cas
对应于所述要确定的一个或多个速度,
[0040]-θ对应于参数向量,该参数向量包括由确定步骤确定的压力差以及由采集步骤测得的多个飞行参数;
[0041]
基于神经网络来计算一个或多个速度,其中要计算的一个或多个速度对应于神经网络的输出层,并且其中压力差以及多个飞行参数对应于神经网络的输入层,神经网络包括固定突触权重,固定突触权重通过对针对飞行器的多次飞行而确定的数据集进行训练来离线确定。
[0042]
本发明还涉及一种飞行器、尤其是运输机,所述飞行器包括如以上所指明的用于控制飞行器的轨迹的系统。
附图说明
[0043]
附图将使得清楚地理解可以如何实现本发明。在这些图中,相同的附图标记表示相似的元件。
[0044]
图1示意性地示出了估计系统的一个实施例。
[0045]
图2示意性地示出了作动器和由作动器偏转的控制面的截面。
[0046]
图3示意性地示出了由本发明的一个实施例中的估计系统实现的神经网络的配置。
[0047]
图4示出了根据本发明实施例的包括对应于飞行器ac的实际速度v
cas
的粗曲线和对应于飞行器ac的估计速度v
cas
的细曲线的图。
[0048]
图5示意性地示出了估计方法。
[0049]
图6示意性地示出了具有应用于飞行器副翼的机载估计系统的飞行器。
具体实施方式
[0050]
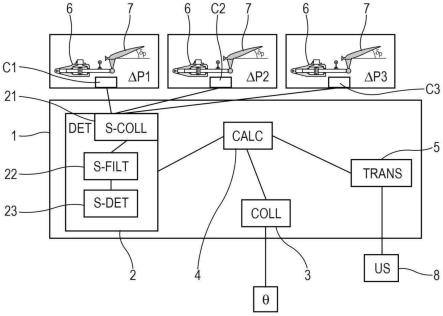
图1中示意性地示出了用于在飞行器ac飞行期间自动估计飞行器ac的速度的系统1的一个实施例,该系统在说明书的其余部分中称为“估计系统1”。
[0051]
估计系统1使得能够实时估计作为飞行器ac的特征的速度。
[0052]
估计系统1包括确定模块det 2、计算模块calc 4和发送模块trans 5。这些多个不同模块例如对应于由飞行器的航空电子计算机的处理单元所采用的软件模块。
[0053]
确定模块2被配置成确定表示施加在飞行器ac的至少一个控制面7上的力的至少一个量。
[0054]
作动器6被配置成使控制面7偏转。表示力的量可以对应于旨在使飞行器ac的控制面7偏转的作动器6的两个液压腔室61、62之间的压力差δp。作动器6于是配备有力传感器,在该情况中为压力差传感器c1、c2、c3。该压力差传感器c1、c2、c3使得能够测量由活塞63分开的该作动器6的两个腔室61和62之间的压力差δp1、δp2、δp3。压力差δp1、δp2、δp3将随着作动器6的轴64的运动的作用而变化,并且也表示施加在控制面7上的空气动力载荷或力。由此,在液压作动器的情况中,表示力的量例如对应于压力差δp1、δp2、δp3。
[0055]
在说明书的其余部分中,将称为“压力差”。然而,应当理解,表述“压力差”也可以具有更一般的含义。它可以意指表示控制面上的力的任何量。由此,可以使用合适的力传感器来测量表示施加在由作动器6偏转的控制面7上的力的量。
[0056]
估计系统1可以应用于配备有力传感器的其他类型的作动器。例如,它可以应用于
配备有马达、泵和力传感器的电动静液作动器(eha),或者甚至应用于也配备有力传感器的机电作动器(ema)。
[0057]
估计系统1可以用于一个作动器6或多个作动器6。
[0058]
将估计系统1应用于多个作动器6的优点在于,防止在飞行期间缺失作动器或控制面7,其原因是其他作动器和控制面7仍然存在。
[0059]
此外,在多个作动器6上使用估计系统1使得能够获得与所使用的作动器6的数量相等的多个速度估计值。如果其中一个估计值与其他估计值明显不同,这可能是力传感器操作有问题的迹象。因此,估计系统1也可以用于传感器监测目的。
[0060]
优选地,在其上使用估计系统1的一个或多个控制面对应于副翼。具体地,副翼是即使在低速下也承受较大空气动力载荷的控制面。估计系统1也可以用在升降舵或方向舵上。然而,方向舵承受较小空气动力载荷,尤其是在中性位置附近。因此,优选的是将估计系统1应用于副翼或升降舵。图6示出了具有应用于飞行器ac的副翼的机载估计系统1的飞行器ac。
[0061]
确定模块2可以包括至少一个采集子模块s-coll 21,采集子模块被配置成从作动器6或从每个作动器6采集单独的压力差δp1、δp2、δp3。单独的压力差δp1、δp2、δp3通过作动器6或每个作动器6的压力差测量传感器c1、c2、c3测量。
[0062]
单独的压力差δp1、δp2、δp3对应于针对作动器6测量的压力差。
[0063]
确定模块2还可以包括滤波子模块s-filt 22,滤波子模块被配置成对所采集的一个或多个单独的压力差δp1、δp2、δp3进行滤波。
[0064]
单独的压力差δp1、δp2、δp3的测量可能是有噪声的,因为它们可能包含来自压力差传感器c1、c2、c3的噪声以及由飞行器ac的操纵引起的变化。然而,这些变化产生噪声,该噪声保持集中在表示气动力的低频分量周围,其自身是飞行器ac的速度v
cas
的函数。
[0065]
滤波子模块22所使用的滤波器可以是由有理传递函数定义的递归无限脉冲响应滤波器。
[0066]
此外,确定模块2还可以包括确定子模块s-det 23,确定子模块被配置成通过计算单独的压力差δp1、δp2、δp3的平均值、或者实际上是中值、或者实际上是加权平均值来确定总体压力差δp。
[0067]
在估计系统1应用于单个作动器6的情况中,不需要确定子模块23。
[0068]
计算模块4被配置成至少基于由确定模块2确定的总体压力差δp或单独的压力差δp1、δp2、δp3来计算飞行器ac的至少一个速度v
cas
。
[0069]
一个或多个估计速度可以对应于校正速度v
cas
、马赫数或飞行器ac的动压力。
[0070]
由于飞行器ac的速度的动态性不是非常高,所以可以对飞行器ac的一个或多个速度v
cas
进行滤波以提高精度。
[0071]
发送模块5被配置成将由计算模块4计算出的飞行器的一个或多个速度v
cas
发送至用户设备us 8。
[0072]
用户设备8可以是能够显示由估计系统1或实施控制规则的飞行器的控制系统(例如飞行控制计算机)估计的一个或多个速度v
cas
的显示设备。
[0073]
估计系统1进一步包括被配置成从飞行器ac采集多个飞行参数的采集模块coll 3。飞行参数在飞行器ac上测量。
[0074]
由计算模块4基于总体压力差δp或单独的压力差δp1、δp2、δp3以及多个飞行参数使用函数来计算飞行器的一个或多个速度v
cas
,其中一个或多个速度v
cas
是总体压力差δp或单独的压力差δp1、δp2、δp3的函数。
[0075]
所述函数具有以下表达式:
[0076]vcas
=f(θ),
[0077]
其中:
[0078]-v
cas
对应于所述要确定的一个或多个速度,
[0079]-θ对应于参数向量,该参数向量包括由确定模块4确定的总体压力差δp或单独的压力差δp1、δp2、δp3以及由测量模块3测得的多个飞行参数。
[0080]
在本发明的一个特定非限制性实施例中,参数向量θ可以具有以下形式:
[0081]
θ=[δp;ps;α;conf;p;δ
p
],
[0082]
其中:
[0083]-δp对应于总体压力差δp或单独的压力差δp1、δp2、δp3,
[0084]-ps对应于静空气压力,
[0085]-α对应于飞行器ac的迎角,
[0086]-conf对应于飞行器(ac)的缝翼和襟翼的空气动力配置,
[0087]-p对应于飞行器ac的滚转角,
[0088]-δ
p
对应于控制面的偏转角或连接到飞行器ac控制面的作动器的轴的位置的偏转角。
[0089]
对应于该特定实施例的参数向量不是随机选择的:它需要了解飞行器飞行的物理性质。它源于非明示地了解控制面的铰链力矩模型。
[0090]
有利地,确定模块2、计算模块4、发送模块5和采集模块3是由飞行器的至少一个航空电子计算机采用的软件模块。
[0091]
基于神经网络来计算一个或多个速度v
cas
,其中要计算的一个或多个速度v
cas
对应于神经网络的输出层l3,并且其中参数向量θ对应于神经网络的输入层l1(图3)。神经网络的神经元通过突触彼此连接。每个突触都有突触权重。突触权重对应于将神经网络的两个神经元彼此连接的突触的乘数因子。每个突触权重是固定的并且离线计算;这意味着一旦离线计算出所有突触权重,则所有突触权重是固定的。因此,在估计系统1实施期间不更新突触权重。从而该解决方案是确定性的。借助于迭代优化方法,例如使用数字计算软件,通过对针对飞行器ac的多次飞行确定的数据集进行训练,来离线计算突触权重。飞行器的多次飞行中的飞行对应于例如在飞行器的飞行测试期间进行的飞行。
[0092]
神经网络用于执行非线性回归。它使得能够估计其输入与输出之间的高度非线性关系。这是有利的,因为由于输入与输出之间的高度非线性关系,直接使用物理模型来估计速度将是非常复杂的,或者甚至是不可能的。
[0093]
在优选的特定配置中,神经网络具有三层:输入层l1、输出层l3和在输入层l1与输出层l3之间的隐藏层l2。图3示意性地示出了三层神经网络。
[0094]
隐藏层l2包括限定数量k个神经元,以具有符合机载计算机的限制的最终复杂度。
[0095]
非限制性地,隐藏层l2的神经元的最大数量k小于20。
[0096]
所使用的神经网络仅向前馈送数据,没有反馈。因此,所使用的神经网络是前馈神
经网络。
[0097]
一旦计算出突触权重,则以如下方式实施神经网络(图3)。
[0098]
参数向量θ对应于输入变量xi(i=1,
…
p)。
[0099]
首先对输入变量xi进行归一化:
[0100]-所述输入变量xi的下界为零:xi=x
i-min(xi),
[0101]-然后将输入变量归一化到-1与+1之间:
[0102]
然后,将归一化输入变量中的每一个乘以突触权重w
ij
(i=1,
…
p;j=1,
…
k)并添加偏差,以获得隐藏层l2的k个神经元中的每一个的第一加权函数。这使得能够量化每个神经元的贡献差异。
[0103]
例如,对于隐藏层l2的k个神经元中的第一个,获得以下第一加权函数:
[0104][0105]
归纳至k个神经元,得到以下:
[0106][0107]
通过应用有界的“激活函数”θ来激活隐藏层l2的每个神经元,使得能够更好地建模非线性行为以获得第二加权函数。激活函数将线性输入转换成非线性输出。激活函数对应于例如sigmoid类型:或“soft sign”函数类型
[0108]
例如,对于第一神经元,通过激活第一神经元获得以下第二加权函数:
[0109]s21
=θ(s
1,1
)
[0110]
归纳至k个神经元,得到以下:
[0111]s2j
=θ(s
1,j
);j=1,
…k[0112]
然后输出层l3通过将第二加权函数乘以将隐藏层l2的神经元与输出层l3的神经元连接的突触的突触权重并且通过添加偏差,来线性地组合加权函数。由此获得以下函数:
[0113][0114]
最终操作在于“反归一化”,参考归一化,即经由变换使输出层l3的输出s0与要估计的量齐次:
[0115]-函数s0的下界为零:s0=s
0-min(s0),
[0116]-然后相对于在训练期间观察到的速度v
cas
的最大值和最小值对函数s0进行归一化:
[0117]
图4示出了当基于神经网络来估计速度v
cas
时,对应于飞行器ac的实际速度v
cas
的粗曲线r1和对应于飞行器ac的估计速度v
cas
的细曲线r2。比较曲线r1和r2,速度v
cas
估计的良好精度,尤其是在低速下,变得显而易见。
[0118]
本发明还涉及一种用于在飞行器ac飞行期间自动估计飞行器ac的速度v
cas
的方法,如图5所示。
[0119]
该方法至少包括以下步骤:
[0120]-由确定模块2实施的确定步骤e1,该步骤在于确定表示施加在飞行器ac的至少一个控制面7上的力的至少一个量;
[0121]-由计算模块4实施的计算步骤e3,该步骤在于至少基于由确定模块2确定的一个或多个量来计算飞行器ac的至少一个速度v
cas
;
[0122]-由发送模块5实施的发送步骤e4,该步骤在于将在计算步骤e3中计算出的飞行器的一个或多个速度v
cas
发送至用户设备。
[0123]
确定步骤e1包括由采集子模块21实施的采集子步骤e11,该步骤在于从作动器6或从每个作动器6采集单独的压力差δp1、δp2、δp3,单独的压力差δp1、δp2、δp3由每个作动器6的压力差测量传感器c1、c2、c3测量。
[0124]
确定步骤e1可以包括由滤波子模块22实施的滤波子步骤e12,该步骤在于对采集的一个或多个单独的压力差δp1、δp2、δp3进行滤波。
[0125]
确定步骤e1可以进一步包括由确定子模块23实施的确定子步骤e13,该步骤在于通过计算单独的压力差δp1、δp2、δp3的平均值、或者实际上是中值、或者实际上是加权平均值来确定总体压力差δp。
[0126]
该方法进一步包括由采集模块3实施的采集步骤e2,该步骤在于从飞行器ac采集多个飞行参数。
[0127]
在计算步骤e3中,基于压力差δp1、δp2、δp3以及多个飞行参数使用函数来计算飞行器的一个或多个速度,其中一个或多个速度(v
cas
)是一个或多个压力差δp的函数,该函数具有以下表达式:
[0128]vcas
=f(θ),
[0129]
其中,
[0130]-v
cas
对应于要确定的一个或多个速度,
[0131]-θ对应于参数向量,该参数向量包括由确定步骤e1确定的压力差δp1、δp2、δp3和由采集步骤e2测得的多个飞行参数;
[0132]
基于神经网络来计算一个或多个速度v
cas
,其中要计算的一个或多个速度v
cas
对应于神经网络的输出层,并且其中压力差δp1、δp2、δp3以及多个飞行参数对应于神经网络的输入层,神经网络包括固定突触权重,固定突触权重通过对针对飞行器ac的多个飞行而确定的数据集进行训练来离线确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1