一种GNSS/INS组合导航系统完好性风险需求分配方法与流程
一种gnss/ins组合导航系统完好性风险需求分配方法
技术领域
1.本发明属于gnss/ins组合导航技术领域,具体涉及一种gnss/ins组合导航完好性风险需求分配方法。
背景技术:
2.完好性是描述导航系统性能的重要指标之一,是对导航系统所提供信息正确性的测量,也包括系统在无法用于导航时向用户发出告警的能力。完好性风险为导航系统未检测到故障但定位误差超出指定告警门限的概率。完好性监测技术通常通过将完好性风险反演为定位域的保护级以判断指定的完好性风险需求是否满足,而保护级反演依赖于完好性风险需求在不同故障模式下的分配。
3.现有完好性监测技术主要针对全球导航卫星系统(global navigation satellite system,gnss)设计,如发明专利cn202111461447.5,公开了一种apnt服务的定位和完好性监测方法及系统,该方法包括:确定目标场景下的定位精度需求;当所述定位精度需求为高精度定位时,采用组合定位算法确定航空器的位置,并采用多解分离方式对组合定位进行完好性监测;当所述定位精度需求为低精度定位时,判断航空器是否为高空用户;若否,则采用基于ldacs的高空用户与低空用户的空对空定位算法确定航空器的位置,并采用基于最小二乘残差法对空对空定位进行完好性监测。本发明能够根据用户对定位精度的不同需求和实际的应用条件,为航空器提供多种apnt备选方案,并针对各个备选方案进行故障检测算法研究,实现apnt服务的完好性监测。
4.发明专利cn201811372441.9公开了一种gnss增强系统的完好性监测系统,其特征在于,包括:第一级监测模块和第二级监测模块,所述第一级监测模块与所述第二级监测模块连接;所述第一级监测模块包括播发前完好性监测模块,所述第二级监测模块包括播发后完好性监测模块。本发明还提供一种gnss增强系统的完好性监测方法,其特征在于,包括:t0时刻对即将播发的改正数进行播发前完好性监测的步骤;对播发前完好性监测结果进行电文编码播发的步骤;在t0+tp时刻对已播发的改正参数进行播发后完好性监测的步骤;对播发后完好性监测结果进行电文编码并播发的步骤。本发明的gnss增强系统的完好性监测系统及方法,能够在高精度服务中提供完好性监测解决方案,并且用户段受到故障影响的概率大大小于现有技术的完好性监测解决方案,因此具有极高的产业应用价值。
5.上述此类方法无法直接应用于gnss/ins组合导航系统,进而无法保证组合导航定位结果的可靠性。部分针对gnss/ins组合导航的完好性监测技术往往以惯性导航系统(inertial navigation system,ins)辅助gnss(如发明专利cn201810088308.4提供的方法),即不考虑ins故障的可能性。但在某些应用场景中,低成本ins故障所引发的完好性风险不容忽视,此时若只考虑gnss故障,将难以保障完好性监测中保护级反演环节的严谨性。
6.因此,提供一种gnss/ins组合导航系统完好性风险需求分配方法,是急需解决的问题。
技术实现要素:
7.为了解决上述现有技术中存在的在保护级反演过程中难以顾及ins故障风险的问题,本发明提供了一种在进行完好性风险需求分配时能够兼顾gnss和ins故障风险,为更为严谨的保护级反演方案奠定理论基础的gnss/ins组合导航系统完好性风险需求分配方法。
8.本发明的目的通过下述技术方案实现。
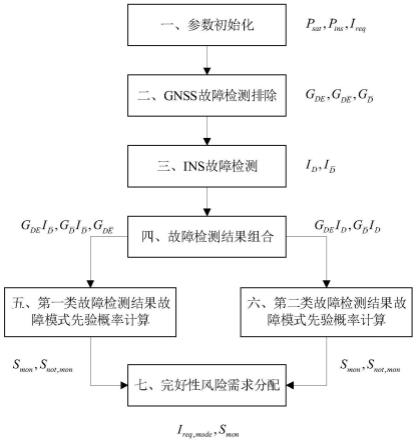
9.一种gnss/ins组合导航系统完好性风险需求分配方法,包括以下步骤:
10.步骤1、参数初始化,包括gnss卫星先验故障概率p
sat
、ins先验故障概率p
ins
以及完好性风险需求值i
req
;
11.步骤2、针对gnss系统进行故障检测和排除,将所有可能的故障检测排除结果分别记为:检测出gnss故障且排除成功g
de
,检测出gnss故障但未排除成功未检测出gnss故障如果gnss故障检测排除结果为g
de
或执行步骤3,否则执行步骤4;
12.步骤3、执行针对ins的故障检测,若检测出ins故障,则记为id;若未检测出ins故障则记为
13.步骤4、综合gnss和ins的故障检测结果,共有五种可能的组合,分别为g
de
id、和将和称为第一类故障检测结果,将g
de
id和称为第二类故障检测结果;如果为第一类故障检测结果,则执行步骤5,否则执行步骤6;
14.步骤5、第一类故障检测结果故障模式先验故障概率计算;
15.步骤5-1、故障模式划分
16.此种情况下,需要同时考虑gnss故障和ins故障。将gnss故障分为无故障模式单星故障模式gs和多星故障模式gm,将ins故障分为无故障模式和故障模式i。
17.gnss/ins组合导航系统所有可能的故障模式为gnss故障和ins故障的组合,分别为:gnss无故障且ins无故障gnss单星故障且ins无故障gnss多星故障且ins无故障gnss无故障且ins故障gnss单星故障且ins故障gsi、gnss多星故障且ins故障gmi。
18.步骤5-2、计算各故障模式的先验概率
19.故障模式先验概率的表达式为:
[0020][0021]
式中,n为当前时刻可见卫星数。
[0022]
故障模式先验概率的表达式为:
[0023][0024]
故障模式先验概率的表达式为:
[0025]
[0026]
故障模式先验概率的表达式为:
[0027][0028]
故障模式gsi先验概率p(gsi)的表达式为:
[0029]
p(gsi)=np
ins
p
sat
(1-p
sat
)
n-1
[0030]
故障模式gmi先验概率p(gmi)的表达式为:
[0031]
p(gmi)=p
ins
[1-(1-p
sat
)
n-p
sat
(1-p
sat
)
n-1
]
[0032]
步骤5-3、判断各故障模式是否需要分配完好性风险需求
[0033]
初始化需要分配完好性风险需求的故障模式集合s
mon
和无需分配完好性风险需求的故障模式集合s
not,mon
,即(表示空集)。
[0034]
遍历以上六种故障模式,如果故障模式mi(i=1,2,
…
,6)满足p(mi)≥i
req
,则表明该故障模式引起的完好性风险可能大于完好性风险需求,需要对该故障模式分配完好性风险需求并进行保护级反演,将该故障模式置入集合s
mon
,即s
mon
=s
mon
∪{mi};否则,将该故障模式置入集合s
not,mon
,即s
not,mon
=s
not,mon
∪{mi},且将该故障模式引发的最大完好性风险记为先验发生概率。即p
hmi
,max(mi)=p(mi)。
[0035]
遍历结束后,直接执行步骤7。
[0036]
步骤6、第二类故障检测结果故障模式先验故障概率计算
[0037]
步骤6-1、故障模式划分
[0038]
此种情况下,ins不参与导航定位过程,gnss/ins组合导航系统退化为gnss系统,完好性风险需求分配过程只需考虑gns故障。此时,将所有可能的故障模式划分为无故障模式单星故障模式gs和多星故障模式gm。
[0039]
步骤6-2、计算各故障模式的先验概率
[0040]
故障模式先验概率的表达式为:
[0041][0042]
故障模式gs先验概率p(gs)的表达式为:
[0043]
p(gs)=np
sat
(1-p
sat
)
n-1
[0044]
故障模式gm先验概率p(gm)的表达式为:
[0045]
p(gm)=1-(1-4p
sat
)
n-np
sat
(1-p
sat
)
n-1
[0046]
步骤6-3、判断各故障模式是否需要分配完好性风险需求
[0047]
遍历以上三种故障模式,如果故障模式mi(i=1,2,3)满足p(mi)≥i
req
,则表明该故障模式引起的完好性风险可能大于完好性风险需求,需要对该故障模式分配完好性风险需求并进行保护级反演,将该故障模式置入集合s
mon
,即s
mon
=s
mon
∪{mi};否则,将该故障模式置入集合s
not,mon
,即s
not,mon
=s
not,mon
∪{mi},且将该故障模式引发的最大完好性风险记为先验发生概率。即p
hmi,max
(mi)=p(mi)。
[0048]
遍历结束后,直接执行步骤7。
[0049]
步骤7、分配完好性风险需求
[0050]
根据以上各故障模式先验概率计算结果,为集合s
mon
中的故障模式平均分配完好性风险需求,集合中每种故障模式的分配值记为i
req,mode
。
[0051]
当集合s
not,mon
非空时,i
req,mode
通过以下方式计算:
[0052][0053]
式中n
mon
为集合s
mon
中的元素数量,n
not,mon
为集合s
not,mon
中的元素数量,mi为s
not,mon
中的元素。
[0054]
当集合s
not,mon
为空时,i
req,mode
通过以下方式计算:
[0055][0056]
积极有益效果:本发明综合考虑了组合导航系统中的gnss和ins故障风险,提出一种gnss/ins组合导航系统完好性风险需求分配方法。建立不同故障检测结果对应的完好性风险模型,通过对比各故障模式先验故障概率与完好性风险需求的大小关系确定需要分配完好性风险需求的故障模式,并为其建立完好性风险需求分配方案。本发明在进行完好性风险需求分配时能够兼顾gnss和ins故障风险,有助于实现更为严谨的gnss/ins组合导航保护级反演方法。
附图说明
[0057]
为了更清楚地说明本公开实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅涉及本公开的一些实施例,而非对本公开的限制。
[0058]
图1为本发明优选实施例中gnss/ins组合导航系统完好性风险需求分配方法流程图。
具体实施方式
[0059]
下面通过附图和实施例对本发明进一步详细说明,通过这些说明,本发明的特点和优点将变得更为清楚明确。然而,本发明并不受限于以下所公开的示范性实施例;可以通过不同形式来对其加以实现。说明书的实质仅仅是帮助相关领域技术人员综合理解本发明的具体细节。
[0060]
一种gnss/ins组合导航系统完好性风险需求分配方法,包括以下步骤:
[0061]
步骤1、参数初始化,包括gnss卫星先验故障概率p
sat
、ins先验故障概率p
ins
以及完好性风险需求值i
req
;
[0062]
步骤2、针对gnss系统进行故障检测和排除,将所有可能的故障检测排除结果分别记为:检测出gnss故障且排除成功g
de
,检测出gnss故障但未排除成功未检测出gnss故障如果gnss故障检测排除结果为g
de
或执行步骤3,否则执行步骤4;
[0063]
步骤3、执行针对ins的故障检测,若检测出ins故障,则记为id;若未检测出ins故障则记为
[0064]
步骤4、综合gnss和ins的故障检测结果,共有五种可能的组合,分别为g
de
id、和将和称为第一类故障检测结果,将g
de
id和
称为第二类故障检测结果;如果为第一类故障检测结果,则执行步骤5,否则执行步骤6;
[0065]
步骤5、第一类故障检测结果故障模式先验故障概率计算;
[0066]
步骤6、第二类故障检测结果故障模式先验故障概率计算;
[0067]
步骤7、分配完好性风险需求。
[0068]
实施例1
[0069]
该实施例针对使用gnss/ins组合导航系统作为导航定位手段的无人机进行完好性风险需求分配。无人机的轨迹以及导航信息通过仿真生成。仿真过程中,无人机的飞行时间为900s,gnss星座为gps,ins的输出频率为40hz,gps的输出频率为1hz。仿真过程中的传感器误差参数如表1所示。此外,仿真过程中未对gnss和ins添加任何故障。
[0070]
表1传感器误差参数
[0071][0072]
下面以第200历元(即第200s)的观测数据为例介绍本发明的实施流程。仿真过程中,第200历元可见卫星数为10,即n=10。
[0073]
如图1所示,本发明的一种gnss/ins组合导航自主完好性监测方法。包括以下步骤:
[0074]
步骤1、参数初始化
[0075]
此步骤需要初始化的参数为:
[0076]
·
gnss卫星先验故障概率p
sat
=1
×
10-5
[0077]
·
ins先验故障概率p
ins
=1
×
10-3
[0078]
·
完好性风险需求值i
req
=0.5
×
10-7
[0079]
步骤2、gnss故障检测排除
[0080]
使用最小二乘残差接收机自主完好性监测技术对gnss进行故障检测,未检测到gnss故障发生,因此gnss故障检测排除结果为此时需执行步骤3;
[0081]
步骤3、gnss故障检测
[0082]
执行针对ins的故障检测,未检测到ins故障发生,因此ins故障检测排除结果为此时需执行步骤4;
[0083]
步骤4、综合gnss和ins的故障检测结果
[0084]
综合步骤3和步骤4得到的gnss和ins的故障检测结果,此时的故障检测结果组合为因此需执行步骤5;
[0085]
步骤5、第一类故障检测结果
[0086]
步骤5-1、故障模式划分
[0087]
此种情况下,需要同时考虑gnss故障和ins故障。将gnss故障分为无故障模式单星故障模式gs和多星故障模式gm,将ins故障分为无故障模式和故障模式i。
[0088]
gnss/ins组合导航系统所有可能的故障模式为gnss故障和ins故障的组合,分别为:gnss无故障且ins无故障gnss单星故障且ins无故障gnss多星故障且ins无故障gnss无故障且ins故障gnss单星故障且ins故障gsi、gnss多星故障且ins故障gmi。
[0089]
步骤5-2、计算各故障模式的先验概率
[0090]
故障模式先验概率的表达式为:
[0091][0092]
根据给定的p
sat
和p
ins
取值,可计算得到
[0093]
故障模式先验概率的表达式为:
[0094][0095]
根据给定的p
sat
和p
ins
取值,可计算得到
[0096]
故障模式先验概率的表达式为:
[0097][0098]
根据给定的p
sat
和p
ins
取值,可计算得到
[0099]
故障模式先验概率的表达式为:
[0100][0101]
根据给定的p
sat
和p
ins
取值,可计算得到
[0102]
故障模式gsi先验概率p(gsi)的表达式为:
[0103]
p(gsi)=np
ins
p
sat
(1-p
sat
)
n-1
[0104]
根据给定的p
sat
和p
ins
取值,可计算得到p(gsi)=9.9991
×
10-8
。
[0105]
故障模式gmi先验概率p(gmi)的表达式为:
[0106]
p(gmi)=p
ins
[1-(1-p
sat
)
n-np
sat
(1-p
sat
)
n-1
]
[0107]
根据给定的p
sat
和p
ins
取值,可计算得到p(gmi)=4.4998
×
10-12
。
[0108]
步骤5-3、判断各故障模式是否需要分配完好性风险需求
[0109]
初始化需要分配完好性风险需求的故障模式集合s
mon
和无需分配完好性风险需求的故障模式集合s
not,mon
,即(表示空集)。
[0110]
遍历以上六种故障模式:
[0111]
i=1时,对于故障模式i=1时,对于故障模式因此需要将故障模式置入集合s
mon
,此时
[0112]
i=2时,对于故障模式因此需要将故障模式置入集合s
mon
,此时
[0113]
i=3时,对于故障模式因此需要将故障模式置入集合s
not,mon
,此时,此时
[0114]
i=4时,对于故障模式因此需要将故障模式置入集合s
mon
,此时
[0115]
i=5时,对于故障模式gsi,p(gsi)=9.9991
×
10-8
>i
req
,因此需要将故障模式gsi置入集合s
mon
,此时
[0116]
i=6时,对于故障模式gmi,p(gmi)=4.4998
×
10-12
<i
req
,因此需要将故障模式gmi置入集合s
not,mon
,此时p
hmi,max
(gmi)=p(gmi)=4.4998
×
10-12
;
[0117]
遍历结束后,直接执行步骤7。
[0118]
步骤7、分配完好性风险需求
[0119]
根据以上各故障模式先验概率计算结果,为集合s
mon
中的故障模式平均分配完好性风险需求,集合中每种故障模式的分配值记为i
req,mode
。
[0120]
此时s
not,mon
非空,且s
mon
中元素数量为4,即n
mon
=4,s
not,mon
中元素数量为2,即n
not,mon
=2。
[0121]
因此,i
req,mode
的计算公式为
[0122][0123]
即此时需要对故障模式gsi进行保护级反演,且分配到每种故障模式的完好性风险需求为i
req,mode
=1.1375
×
10-8
。
[0124]
综合以上优选实施例中的完好性风险需求分配过程,本发明所提供的一种gnss/ins组合导航系统完好性风险需求分配方法,能够综合考虑gnss和ins的故障风险,并向部分故障模式合理分配完好性风险需求,进而有助于实现更为严谨的gnss/ins组合导航保护级反演方法。
[0125]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1