转向角传感器的故障诊断装置和方法与流程
本公开的示例性实施例涉及一种转向角传感器的故障诊断装置和方法,更具体地,涉及一种转向角传感器的故障诊断装置和方法,被配置为能够诊断包括在转向角传感器中的位置传感器的故障,所述转向角传感器检测为车辆提供的方向盘的转向角。
背景技术:
1、一般而言,应用于车辆的电动转向系统可包括安装在转向轴上的转向角传感器,转向角传感器传送与驾驶员操纵的方向盘相关的操纵力,并检测方向盘的转动角度,也即转向角。
2、如图所示1所示,转向角传感器包括安装在转向轴上的主齿轮mg,与主齿轮mg以恒定传动比(即,具有不同传动比)啮合的第一和第二副齿轮sg1和sg2,以及分别附接到第一和第二副齿轮sg1和sg2的位置传感器ps1和ps2。
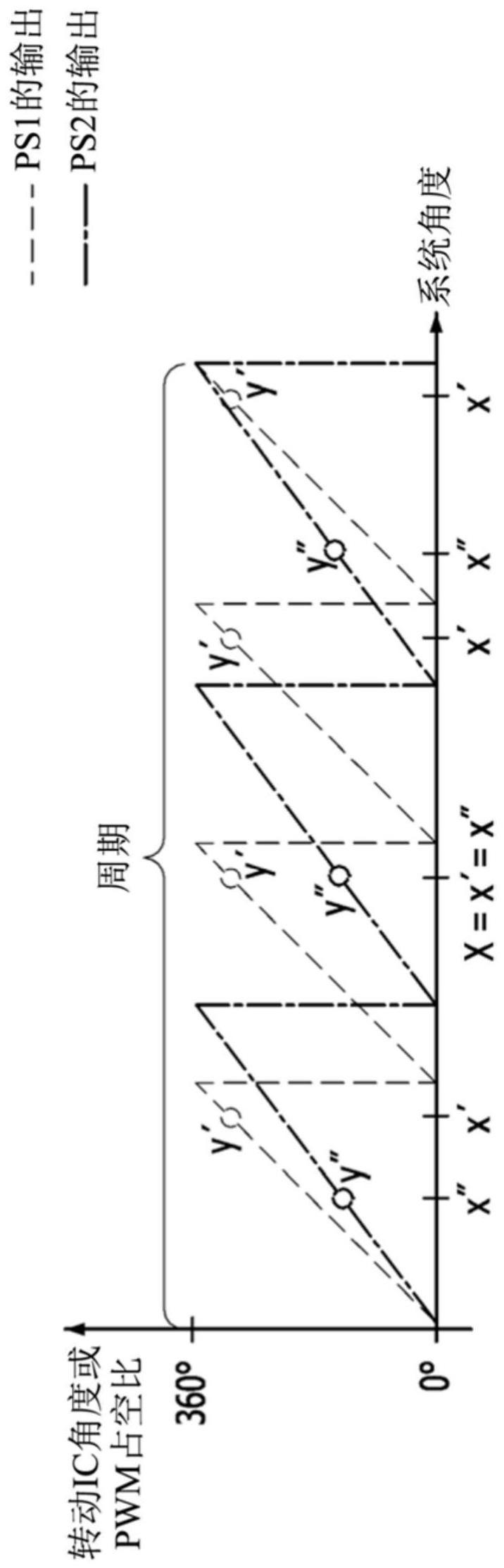
3、转向角传感器的第一和第二位置传感器ps1和ps2的输出(即,信号)被输出到电动转向系统的电子控制单元(ecu)。第一位置传感器ps1输出第一副齿轮sg1的转动角度,第二位置传感器ps2输出第二副齿轮sg2的转动角度。
4、转向轴的转动角度(即,转向角)可以根据第一副齿轮sg1的转动角度和第二副齿轮sg2的转动角度来确定。
5、本公开的背景技术在韩国专利申请公开文本第10-2021-0113758号(2021年9月17日公开,名称为“用于检测转向角传感器故障的装置及其控制方法”)中公开。
6、背景技术涉及在齿轮的轮齿丢失或变形的情况下,主齿轮和每个副齿轮之间的啮合脱位时,检测关于不正确角度的输出信息的方法。
7、然而,背景技术存在的问题在于,如果转向角传感器的故障是第一位置传感器ps1或第二位置传感器ps2的故障(例如,传感器ic的故障)导致的,而齿轮是正常啮合状况,没有轮齿损坏,则可能无法诊断。
技术实现思路
1、根据本公开的一个方面,发明本公开是为了解决上述问题,并且旨在提供一种用于诊断转向角传感器的故障的装置和方法,被配置为能够诊断包括在转向角传感器中以检测为车辆提供的方向盘转向角的位置传感器的故障。
2、根据本公开的一个方面,一种转向角传感器的故障诊断装置包括:转向角传感器和处理器,其中转向角传感器包括安装在转向轴上的主齿轮(main gear,mg),以不同的传动比与主齿轮(mg)啮合的第一和第二副齿轮(sub-gears,sg1和sg2),以及分别连接到第一和第二副齿轮(sg1和sg2)的位置传感器(ps1和ps2);所述处理器接收随着对应的副齿轮的转动而从转向角传感器的每个位置传感器(position sensor,ps1和ps2)输出的信号,检测两个位置传感器(ps1和ps2)中输出未指定与同一系统角度的值(x'=x")对应的不同输出信号值(y'和y")的位置传感器,并确定该位置传感器是故障的原因。
3、在一实施例中,处理器可接收从每个位置传感器(ps1和ps2)输出的输出信号,并通过将位置传感器(ps1和ps2)的输出信号值(y'和y")与以表格或映射图形式预存的与同一系统角度的值(x'=x")相对应的值进行比较而输出超出误差范围的输出信号值时,确定导致故障情况的对应位置传感器。
4、在一实施例中,当在表示副齿轮(sg1和sg2)的正常工作范围或其转动角度的纵轴的任一值处绘制虚拟水平线时,以及当基于虚拟水平线与位置传感器(ps1)信号相交的交点(y')绘制虚拟垂直线时,如果虚拟垂直线与位置传感器(ps2)信号相交的交点(y")对应的系统角度的值(x")和虚拟垂直线和与位置传感器(ps1)信号相交的交点(y')对应的系统角度的值(x')在指定的误差范围内是相同的值(x'=x"),并且当虚拟水平线和位置传感器(ps1)的信号在所有交点(y')处全都被正常检测到时,处理器可确定位置传感器(ps1和ps2)正常。
5、在一实施例中,当在表示副齿轮(sg1和sg2)的正常工作范围或其转动角度的纵轴的任一值处绘制虚拟水平线时,以及当基于虚拟水平线与位置传感器(ps1)信号相交的交点(y')绘制虚拟垂直线时,如果虚拟垂直线与位置传感器(ps1)信号相交的交点(y')对应的系统角度的值(x')以及虚拟垂直线与位置传感器(ps1)信号相交的交点(y')对应的系统角度的值(x")在指定的误差范围内是相同的值(x'=x"),并且当在虚拟水平线与位置传感器(ps2)的信号相交的交点(y")全都正常检测到位置传感器(ps1和ps2)时,并且当虚拟水平线和位置传感器(ps2)的信号在所有交点(y")全都被正常检测到时,处理器可确定位置传感器(ps1和ps2)正常。
6、在一实施例中,处理器可在一次也没有检测到对应于交点的系统角度的值在指定的误差范围内是相同的值(x'=x”)时,确定位置传感器(ps1和ps2)中的至少一个异常。
7、在一实施例中,当使用下面的数学公式1和2计算位置传感器(ps1和ps2)的对应于相同特定系统角度(x'和x")的输出信号值(y'和y")时,以及当位置传感器(ps1和ps2)的输出信号值(y'和y”)偏离与相同的两个系统角度(x'和x")对应的指定误差范围时,处理器可确定位置传感器的故障。
8、(公式1)
9、x'=y'/a+b*i
10、a是通过第一位置传感器(ps1)相对于系统角度的传动比计算的值,作为在系统角度内可检测到相同输出信号值(y')的重复次数,
11、b是通过“系统角度/a”计算的值,作为第一位置传感器(ps1)的输出值被等同地重复的系统角度间隔(差值),并且
12、i是从零(0)起小于a的常数值。
13、(公式2)
14、x"=y"/c+d*j
15、c是通过第一位置传感器(ps1)相对于系统角度的传动比计算的值,作为在系统角度内可检测到相同输出信号值(y')的重复次数,
16、d是通过“系统角度/c”计算的值,作为第一位置传感器(ps1)的输出值被等同地重复的系统角度间隔(差值),并且
17、j是从零(0)起小于c的常数值。
18、根据本公开的一个方面,一种转向角传感器故障诊断方法中,转向角传感器被配置为包括安装在转向轴上的主齿轮(mg),以不同的传动比与主齿轮(mg)啮合的第一和第二副齿轮(sg1和sg2),以及分别连接到第一和第二副齿轮(sg1和sg2)的位置传感器(ps1和ps2),方法包括:通过处理器接收随着对应的副齿轮的转动从转向角传感器的每个位置传感器(ps1和ps2)输出的信号;以及通过处理器检测两个位置传感器(ps1和ps2)中输出未指定与同一系统角度的值(x'=x")对应的不同输出信号值(y'和y")的位置传感器,并确定检测到的位置传感器是故障的原因。
19、在一实施例中,在接收从每个位置传感器(ps1和ps2)输出的输出信号后,当位置传感器(ps1和ps2)的输出信号值(y'和y”)来与以表格或映射图形式预存的与同一系统角度的值(x'=x")相对应的值进行比较,并且输出了超出误差范围的输出信号值时,处理器确定对应的位置传感器为故障情况。
20、在一实施例中,为了确定位置传感器的故障,处理器可被配置为:在表示每个副齿轮(sg1和sg2)的正常工作范围或转动角度的纵轴的任一值处绘制虚拟水平线,基于虚拟水平线与位置传感器(ps1)信号相交的交点(y′)绘制虚拟垂直线,如果虚拟垂直线与位置传感器(ps2)信号相交的交点(y″)所对应的系统角度的值(x″)以及虚拟垂直线与位置传感器(ps1)信号相交的交点(y′)所对应的系统角度的值(x′)在指定的误差范围内是相同的值(x′=x"),并且当在虚拟水平线与位置传感器(ps1)的信号在两者相交的所有交点(y′)处全都正常检测到时,确定位置传感器(ps1和ps2)正常。
21、在一实施例中,当要确定位置传感器的故障时,处理器可被配置为:在表示每个副齿轮(sg1和sg2)的正常工作范围或其转动角度的纵轴的任一值处绘制虚拟水平线,并基于虚拟水平线与位置传感器(ps2)信号相交的交点(y″)绘制虚拟垂直线,如果虚拟垂直线与位置传感器(ps1)信号相交的交点(y′)对应的系统角度的值(x′)以及虚拟垂直线与位置传感器(ps2)信号相交的交点(y″)对应的系统角度的值(x″)在指定的误差范围内是相同的值(x′=x"),并且当在虚拟水平线与位置传感器(ps2)的信号相交的所有交点(y″)处位置传感器(ps1和ps2)全都被正常检测到时,确定位置传感器(ps1和ps2)正常。
22、在一实施例中,处理器可在于指定的误差范围内(指定了相应交点对应的系统角度的值在该误差范围内)一次也没有检测到相同值(x′=x″)时,确定位置传感器(ps1和ps2)中的至少一个异常。
23、在一实施例中,为了确定位置传感器的故障,处理器可使用下面的数学公式1和2计算位置传感器(ps1和ps2)的对应于相同特定系统角度(x'和x")的输出信号值(y'和y"),以及可以在位置传感器(ps1和ps2)的输出信号值(y'和y”)偏离指定的与两个系统角度的相同值(x'和x")对应的误差范围时,确定位置传感器的故障。
24、(公式1)
25、x'=y'/a+b*i
26、a是第一位置传感器(ps1)相对于系统角度的传动比,作为在系统角度内能检测到相同输出信号值(y')的重复次数,
27、b是通过“系统角度/a”计算的值,作为第一位置传感器(ps1)的输出值被等同地重复的系统角度间隔(差值),并且
28、i是从零(0)起小于a的常数值。
29、(公式2)
30、x"=y"/c+d*j
31、c是通过第一位置传感器(ps1)相对于系统角度的传动比计算的值,作为在系统角度内检测到相同输出信号值(y')的重复次数,
32、d是通过“系统角度/c”计算的值,作为第一位置传感器(ps1)的输出值被等同地重复的系统角度间隔(差值),并且
33、j是从零(0)起小于c的常数值。
34、根据本公开的一个方面,本公开被配置为能够诊断包括在转向角传感器(所述转向角传感器检测为车辆提供的方向盘转向角)中的位置传感器的故障。此外,本公开具有的效果在于:检测两个位置传感器(ps1和ps2)之一并使得被检测出的位置传感器能够被确定为故障,其中所述位置传感器(ps1和ps2)之一包括在转向角传感器中并输出没有指定与同一系统角度的值(x)对应的不同输出信号值(y)。
- 还没有人留言评论。精彩留言会获得点赞!