一种基于多源异构数据融合的反无人机系统目标检测方法与流程
本发明涉及反无人机系统,具体涉及一种基于多源异构数据融合的反无人机系统目标检测方法。
背景技术:
1、近年来无人机行业的发展突飞猛进,应用范围越来越广,但是随之带来的威胁也不容小觑。传统的安防系统不足以抵御低空的无人机入侵,防御手段也越来越多。
2、数据融合最早便应用于军工领域,是一种将来自多种/多个传感器的数据进行关联与组合以实现较为准确的位置推断和身份估计的技术,利用该技术可以对战场状况、威胁程度和重要水平做出及时完整的评价。多源异构数据融合技术是将来自多个数据来源、结构不同的数据进行融合的数据处理技术,通过多源异构数据融合可以实现多源异构数据的信息整合,信息的互补能增加数据的置信度、提高可靠性、降低不确定性。基于多源异构数据建立的回归预测模型能获得更加综合的估计和判断。研究基于多核学习方法的多源异构数据融合时,多核学习方法可以根据数据类型使用不同核函数将不同的特征映射到同一特征空间,实现异构数据的特征空间融合,在融合特征空间的上层添加回归模型实现预测功能。
3、低空防御系统允许过程中产生了大量的传感器数据,包括无线电扫描数据、可见光红外视频数据、音频、文本等多源异构信息,可以从多方面获取防护空域内的动态信息。但是由于各设备之间的关联度比较低,且各有优劣势,急需对各数据类型进行融合。低空无人机的探测和防御技术主要利用无线电、雷达、光电和干扰等设备对三维空间低、慢、小的飞行目标进行综合管制。低空无人机探测和防御的原始数据包含无线电的频谱信息,雷达探测的目标三维空间位置、速度等运动特征信息和光电设备的影像信息。通过消除冗余数据、结合互补数据和具有依赖关系的合作信息,整合得到更准确、更可靠、更完整的目标信息。
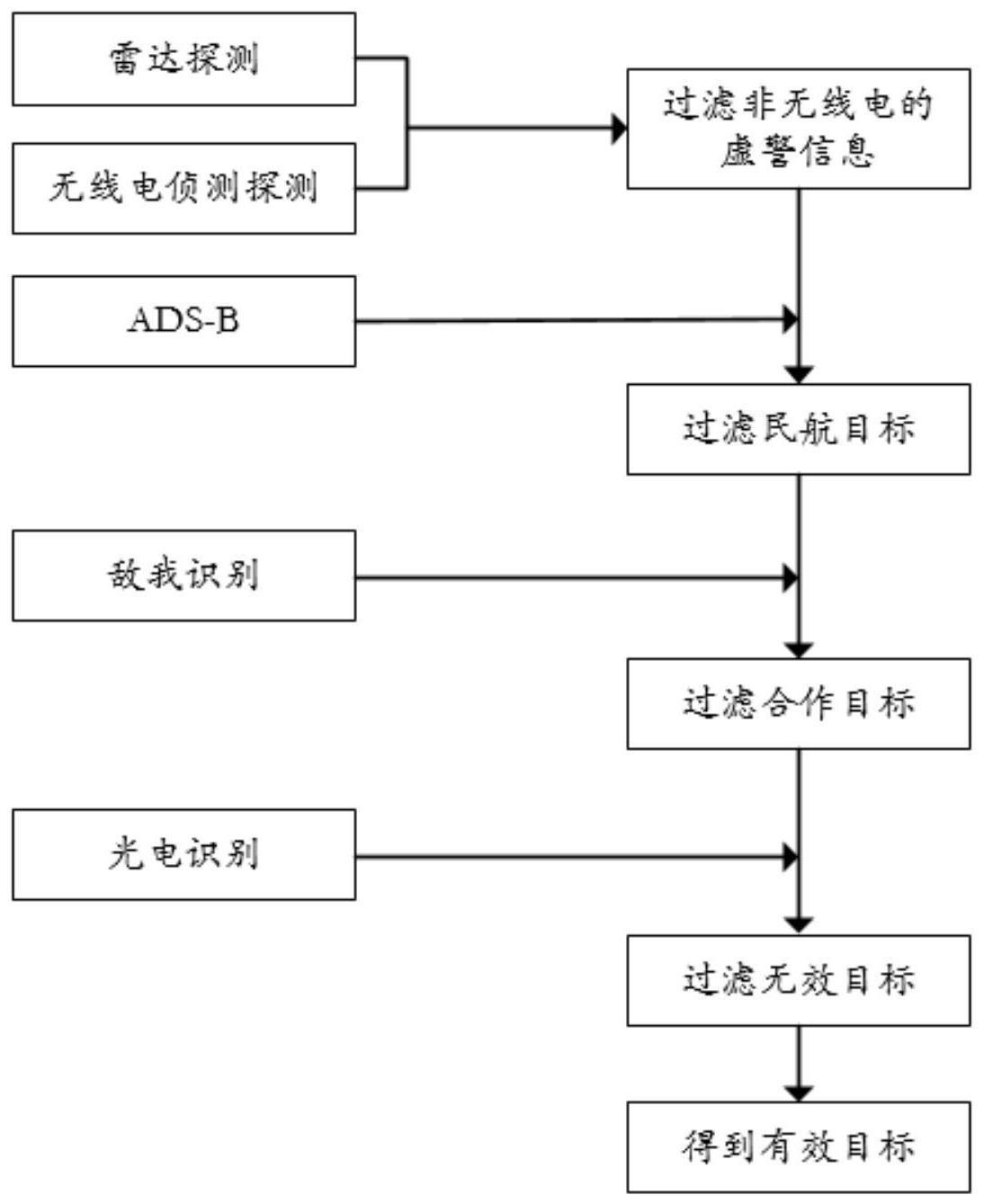
4、如图1所示,反无人机系统的工作流程主要分三个步骤:第一步是目标特征提取,即探测识别,第二步是多源数据的融合,第三步是分析得出结论并实施,对在有效范围内的敌方目标进行防御打击。
5、由于单一设备无法保证防御打击目标的准确性,目前现有的无人机防御系统解决方案多以雷达设备、光电设备、无线电探测设备和干扰设备等多设备进行组合,而多设备类型的系统具有以下等缺陷:
6、1)数据类型不统一;
7、2)难以避免误报、漏报情况;
8、3)无线电探测设备对diy无人机存在探测困难问题;
9、4)无法区分敌我、区分民航目标;
10、5)存在木桶效应短板;
11、6)自动化程度低;
12、7)系统误差不确定;
13、其中,各探测方案的优缺点如下表1所示:
14、表1各探测方案的优缺点
15、
技术实现思路
1、有鉴于此,本发明提供了一种基于多源异构数据融合的反无人机系统目标检测方法,支持同时接入多种数据源,使用一系列的融合技术,在目标位置、目标类型、敌我类型、实时性、覆盖范围以及成本维护等方面作出提升,能够减少数据冗余、避开各设备的缺点、综合各设备的优势。
2、本发明的技术方案为:一种基于多源异构数据融合的反无人机系统目标检测方法,包括以下步骤:
3、第一步:对雷达和无线电侦测所探测的目标信息进行融合,并过滤非无线电的虚警信息;
4、第二步:根据ads-b接收到的民航飞机信息,判断经第一步融合并过滤后的目标是否为低空飞行目标,保留低空飞行目标,过滤掉民航飞机;
5、第三步:根据敌我识别模块的实时三维坐标信息,遍历第二步的结果并将其与敌我识别模块的实时三维坐标信息进行对比,设定三维空间的距离阈值和高度阈值,将阈值以外的目标标记为非合作目标,反之标记为合作目标;
6、第四步:经过前三步初步确认目标后,将目标的位置信息传输到光电设备用来引导光电设备;光电设备被引导对准目标后,进行图像检测。
7、优选地,所述第一步中,雷达和无线电侦测信息的融合过程为:
8、步骤一:输入雷达和无线电侦测的探测信息;
9、步骤二:判断无线电侦测是否探测到目标,如果无线电侦测没有探测到目标,判断是否存在特征频段,若不存在特征频段则认为雷达探测的目标均为虚警,并滤除掉,若存在特征频段则转入步骤三;如果无线电侦测探测到目标,则转入步骤三;
10、步骤三:遍历雷达目标,判断其是否在无线电侦测所探测到的方位扇区阈值范围内,如果不在方位扇区阈值范围内,认为雷达探测的目标均为虚警,并滤除掉,反之保留下来。
11、优选地,所述步骤二中,对无线电侦测的频谱探测范围按照每200mhz划定一个区间段,以0.1秒为时间间隔,累计统计各频谱区间段内高于当前平均杂波幅值1.4倍以上的频谱出现的次数;当某频谱区间段内连续2秒探测到特征频段时,遍历雷达目标进一步确认。
12、优选地,所述第三步中,在获取敌我识别模块的实时三维坐标信息后,做统一时间戳处理,具体处理方法为:以收到雷达数据的a时刻为参照,取敌我识别模块最新返回的数据b和上一组数据c,根据数据b和数据c推算出敌我识别模块在a时刻对应的数据d,比较a时刻的雷达数据和数据d;其中,数据包含的种类有:时间戳、经度、纬度、高度。
13、优选地,推算所述敌我识别模块在a时刻对应的数据d的具体过程包括:以敌我识别模块的设备架设点为基准,在地心极坐标系下,把数据b和数据c的经度、纬度、高度转换为数据b和数据c的距离、方位、俯仰信息;
14、当a时刻和数据b对应的时间之间的间隔t2小于30毫秒时,直接比较不再进行推算;当时间间隔t2大于30毫秒时,进行推算:
15、令t1=tb-ta,t2=ta-tb;
16、其中,t1为数据b对应时间和a时刻之间的时间间隔,t2为a时刻和数据b对应时间之间的时间间隔,ta为a时刻的时间,tb为数据b对应的时间;
17、根据数据b和数据c相对地面站的距离、方位、俯仰信息计算其在北、天、东三个方向上的距离矢量:
18、lb北=b距离×cos(b俯仰÷180×π)×cos(b方位÷180×π);
19、lb天=b距离×sin(b俯仰÷180×π);
20、lb东=b距离×cos(b俯仰÷180×π)×sin(b方位÷180×π);
21、同样方法可得到lc北、lc天、lc东;
22、其中,lb北、lb天、lb东、lc北、lc天、lc东分别为数据b和数据c在北、天、东三个方向上的距离矢量;b距离、b方位、b俯仰分别为数据b相对地面站的距离、方位、俯仰信息;
23、计算数据d在北、天、东三个方向上的距离矢量:
24、ld北=lb北+(lb北-lc北)÷t1×t2;
25、ld天=lb天+(lb天-lc天)÷t1×t2;
26、ld东=lb东+(lb东-lc东)÷t1×t2;
27、其中,ld北、ld天、ld东分别为数据d在北、天、东三个方向上的距离矢量;
28、把ld北、ld天、ld东转换成地心坐标系下的距离矢量,再将地心坐标系下的距离矢量转换为经度、纬度、高度信息,至此,得到数据d的三维空间坐标。
29、优选地,所述第四步中,采用帧间差分法做图像检测,且在取帧之前对视频流进行图像分割。
30、优选地,所述帧间差分处理过程中,当相邻目标之间的距离在预设范围内,对每一帧图像取像素点时隔一个点取一次。
31、有益效果:
32、1、本发明的目标检测方法融合了多种传感设备的数据类型,行业内涵盖面广,计算速度快,结果准确率高,能够减少数据冗余、避开各设备的缺点、综合各设备的优势。
33、2、本发明对非常见频段无人机目标,采用一种特征频段采集分析的方法,从而提高了目标检测的覆盖面。
34、3、本发明采用了一种推点的方法,能够实时高效推算敌我识别模块采集的信息,提高了敌我识别模块的准确度和实时性。
35、4、本发明针对光电设备的融合过程设计了一种改进型的图像目标检测算法,能够有效提高检测效率。
- 还没有人留言评论。精彩留言会获得点赞!