一种机器人的位姿确定方法及电子设备与流程
本发明涉及机器人,具体涉及一种机器人的位姿确定方法及电子设备。
背景技术:
1、机器人一般根据已知地图进行自主导航,以进行路径规划等各类作业。机器人可靠实现自主导航的前提是在已知地图上准确确定机器人当前位姿。传统技术确定机器人当前位姿时,通常,需要将采集的当前激光数据进行全局地图匹配,全局地图匹配过程需要将当前激光数据与全局地图的所有的原始激光数据皆进行匹配,匹配时间较长,原始激光数据的数据量还会根据地图尺寸的增大而增多,原始激光数据越多,匹配时间也会越长,不利于机器人及时调整当前位姿,降低机器人进行自主导航的实时性。
技术实现思路
1、本发明实施例的一个目的旨在提供一种机器人的位姿确定方法及电子设备,有利于提高调整位姿的效率。
2、在第一方面,本发明实施例提供了一种机器人的位姿确定方法,包括:
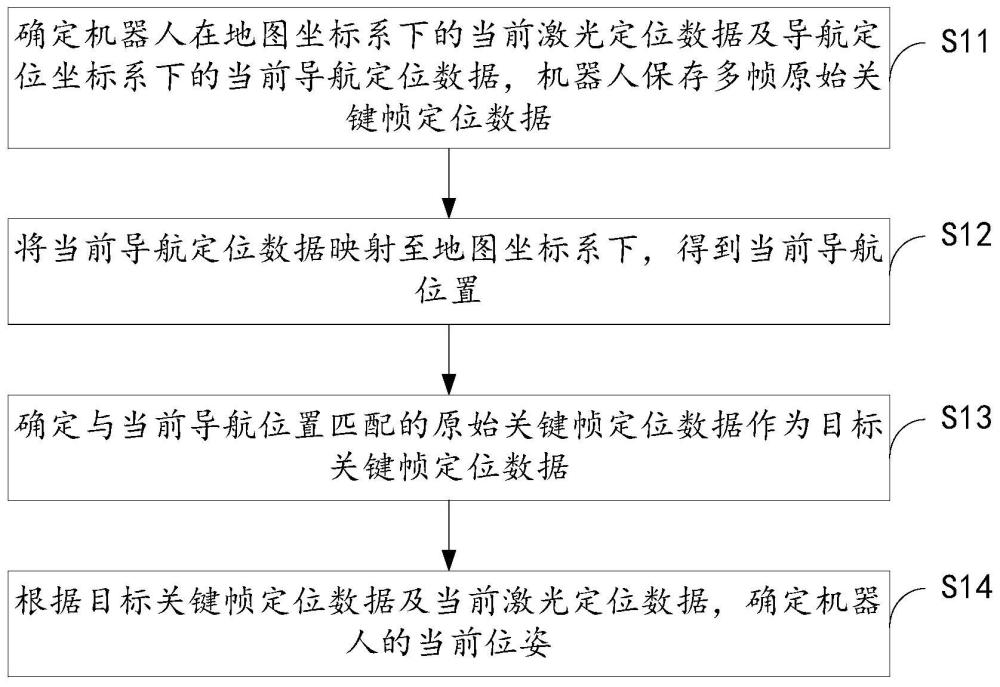
3、确定机器人在地图坐标系下的当前激光定位数据及导航定位坐标系下的当前导航定位数据,所述机器人保存多帧原始关键帧定位数据;
4、将所述当前导航定位数据映射至所述地图坐标系下,得到当前导航位置;
5、确定与所述当前导航位置匹配的原始关键帧定位数据作为目标关键帧定位数据;
6、根据所述目标关键帧定位数据及所述当前激光定位数据,确定所述机器人的当前位姿。
7、可选的,所述目标关键帧定位数据包括在原始位姿下的原始激光定位数据,所述根据所述目标关键帧定位数据及当前激光定位数据,确定所述机器人的当前位姿包括:
8、根据所述目标关键帧定位数据及所述当前激光定位数据,确定预测角度;
9、根据所述当前导航位置、所述预测角度及所述原始激光定位数据,确定所述机器人的当前位姿。
10、可选的,所述原始位姿包括原始位置及原始姿态角度,所述根据所述目标关键帧定位数据及当前激光定位数据,确定预测角度包括:
11、根据所述目标关键帧定位数据及当前激光定位数据,确定主方向偏差角度;
12、根据所述原始姿态角度及所述主方向偏差角度,确定预测角度。
13、可选的,所述根据所述目标关键帧定位数据及当前激光定位数据,确定主方向偏差角度包括:
14、根据指定定位数据,确定主方向角度,当所述指定定位数据为所述目标关键帧定位数据时,所述主方向角度为原始主方向角度,当所述指定定位数据为所述当前激光定位数据时,所述主方向角度为当前主方向角度;
15、根据所述原始主方向角度及所述当前主方向角度,确定主方向偏差角度。
16、可选的,所述根据指定定位数据,确定主方向角度包括:
17、对所述指定定位数据进行直线检测处理,得到多条候选直线;
18、根据每条所述候选直线占据的激光点的数量,确定目标直线;
19、确定所述目标直线的主方向斜率为所述主方向角度。
20、可选的,所述原始位姿包括原始位置及原始姿态角度,所述根据所述原始位姿及预测角度,确定所述机器人的当前位姿包括:
21、根据所述当前导航位置及所述预测角度,确定第一预测位姿;
22、根据所述当前导航位置、所述预测角度及预设角度,确定第二预测位姿;
23、根据所述第一预测位姿、所述第二预测位姿及所述原始激光定位数据,确定所述机器人的当前位姿。
24、可选的,所述根据所述第一预测位姿、所述第二预测位姿及所述原始激光定位数据,确定所述机器人的当前位姿包括:
25、根据所述第一预测位姿,将所述原始激光定位数据转换至地图坐标系下,得到第一激光定位数据;
26、根据所述第二预测位姿,将所述原始激光定位数据转换至地图坐标系下,得到第二激光定位数据;
27、将所述第一激光定位数据与所述第二激光定位数据分别与预存的环境地图进行匹配,得到第一匹配结果及第二匹配结果;
28、根据所述第一匹配结果及所述第二匹配结果,确定所述机器人的当前位姿。
29、可选的,所述第一匹配结果包括第一匹配值及所述第一预测位姿相对所述环境地图的第一相对位姿,所述第二匹配结果包括第二匹配值及所述第二预测位姿相对所述地图的第二相对位姿,所述根据所述第一匹配结果及所述第二匹配结果,确定所述机器人的当前位姿包括:
30、将所述第一匹配值与所述第二匹配值进行比较,确定目标匹配值;
31、若所述目标匹配值为第一匹配值,则根据所述第一相对位姿与所述第一预测位姿,确定所述机器人的当前位姿;
32、若所述目标匹配值为第二匹配值,则根据所述第二相对位姿与所述第二预测位姿,确定所述机器人的当前位姿。
33、可选的,所述机器人预存有在地图坐标下的多个原始激光定位数据及在导航定位坐标系下的多个原始导航定位数据,所述将所述当前导航定位数据映射至所述地图坐标系下,得到当前导航位置包括:
34、对多个所述原始激光定位数据及多个所述原始导航定位数据进行插值处理,得到每个所述原始导航定位数据对应的激光定位数据;
35、根据每个所述原始导航定位数据及其对应的激光定位数据,确定所述导航定位坐标系转换至所述地图坐标系的转换矩阵;
36、根据所述转换矩阵,将所述当前导航定位数据转换至所述地图坐标系下,得到当前导航位置。
37、可选的,所述原始关键帧定位数据包括原始位置,所述确定与所述当前导航位置信息匹配的目标关键帧定位数据包括:
38、计算所述当前导航位置与所述原始位置之间的距离;
39、确定与所述当前导航位置距离最短的所述原始位置对应的原始关键帧定位数据为所述目标关键帧定位数据。
40、在第二方面,本发明实施例提供了一种电子设备,包括:
41、至少一个处理器;
42、以及,与所述至少一个处理器通信连接的存储器;其中,
43、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上所述的方法。
44、在本发明实施例提供的机器人的位姿确定方法中,首先,确定机器人在地图坐标系下的当前激光定位数据及导航定位坐标系下的当前导航定位数据,机器人保存多帧原始关键帧定位数据,其次,将当前导航定位数据映射至地图坐标系下,得到当前导航位置信息,再次,确定与当前导航位置信息匹配的原始关键帧定位数据作为目标关键帧定位数据,最后,根据目标关键帧定位数据及当前激光定位数据,确定机器人的当前位姿。由于本方法无需将当前激光数据进行全局地图匹配,只需要根据当前导航位置,在多帧原始关键帧定位数据中找到与当前激光定位数据最匹配的目标关键帧定位数据,根据当前激光定位数据与目标关键帧定位数据,即可确定机器人的当前位姿,因此,本方法能够快速确定机器人的当前位姿,提高机器人调整位姿的效率,有利于机器人及时调整位姿。
技术特征:
1.一种机器人的位姿确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述目标关键帧定位数据包括在原始位姿下的原始激光定位数据,所述根据所述目标关键帧定位数据及当前激光定位数据,确定所述机器人的当前位姿包括:
3.根据权利要求2所述的方法,其特征在于,所述原始位姿包括原始位置及原始姿态角度,所述根据所述目标关键帧定位数据及当前激光定位数据,确定预测角度包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述目标关键帧定位数据及当前激光定位数据,确定主方向偏差角度包括:
5.根据权利要求4所述的方法,其特征在于,所述根据指定定位数据,确定主方向角度包括:
6.根据权利要求2所述的方法,其特征在于,所述根据所述当前导航位置、所述预测角度及所述原始激光定位数据,确定所述机器人的当前位姿包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述第一预测位姿、所述第二预测位姿及所述原始激光定位数据,确定所述机器人的当前位姿包括:
8.根据权利要求7所述的方法,其特征在于,所述第一匹配结果包括第一匹配值及所述第一预测位姿相对所述环境地图的第一相对位姿,所述第二匹配结果包括第二匹配值及所述第二预测位姿相对所述环境地图的第二相对位姿,所述根据所述第一匹配结果及所述第二匹配结果,确定所述机器人的当前位姿包括:
9.根据权利要求1至8任一项所述的方法,其特征在于,所述机器人预存有在地图坐标下的多个原始激光定位数据及在导航定位坐标系下的多个原始导航定位数据,所述将所述当前导航定位数据映射至所述地图坐标系下,得到当前导航位置包括:
10.根据权利要求1至8任一项所述的方法,其特征在于,所述原始关键帧定位数据包括原始位置,所述确定与所述当前导航位置匹配的目标关键帧定位数据包括:
11.一种电子设备,其特征在于,包括:
技术总结
本发明涉及机器人技术领域,公开一种机器人的位姿确定方法及电子设备。位姿确定方法包括:确定机器人在地图坐标系下的当前激光定位数据及导航定位坐标系下的当前导航定位数据,机器人保存多帧原始关键帧定位数据,将当前导航定位数据映射至地图坐标系下,得到当前导航位置信息,确定与当前导航位置匹配的原始关键帧定位数据作为目标关键帧定位数据,根据目标关键帧定位数据及当前激光定位数据,确定机器人的当前位姿。因此,本方法能够根据当前导航位置,找到与当前激光定位数据最匹配的关键帧激光定位数据,以便快速确定机器人的当前位姿,提高机器人调整位姿的效率,有利于机器人及时调整位姿。
技术研发人员:曹军
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!