一种车载堤防险情隐患探测系统及预警方法与流程
1.本发明涉及堤坝探测和预警技术领域,具体是一种车载堤防险情隐患探测系统及预警 方法。
背景技术:
2.堤防是水利设施的基础建设,在防洪抗洪中起到核心作用,堤防建设关系到人民生命 安全,关系到经济效益及社会效益;现代的堤防水坝主要有两大类:土石坝和混凝土坝; 土石坝是用土或石头横越大河而建造的宽坝;由于物料较松散导致地基的动摇、水流渗入, 降低堤坝的坚固程度;混凝土坝多用混凝土建成,主要特点是利用自身的重量来支撑水体 压力。
3.而不同的时间段,不同的技术修建的堤防不可避免地存在隐患,因此后期堤防险情隐 患分布的排查尤为重要;因此需要对堤防隐患探测进行探测,堤防隐患探测的方法可分为 破损法和无损法,前者包括坑探、槽探、井探和钻探等方法,后者则主要指物理探测方法。
4.破损法具有探测结果一目了然,可以很直观的反映出问题所在,不需进行复杂的分析 计算便可得知堤防所存在的隐患及隐患点的位置;但该方法费时费力,功效低,且具有一 定的破坏性和局部性,单单通过个别探坑发现的问题很难代表整个堤防的隐患问题,而且 开挖部位难以恢复原貌,具有一定的不可逆性。
5.无损法主要包括探地雷达法、瞬变电磁波法、高密度电法和瑞雷面波法;这些无损探 测方法在各类地质探测应用中的重心各有不同,如探地雷达法适用于浅层堤防隐患探测; 而瞬变电磁波法适用于深层堤防隐患探测;由于堤防工程条件的复杂性及现场检测条件的 局限性,只依靠单一设备并不能满足堤防内部全面、精准的隐患探测要求,难以得到全面、 正确和可靠的地学信息,并不能完全适用于堤防险情隐患的探测。
6.中国专利公开了一种堤防隐患时移电法探测系统(公告号cn108873072a),该专利技 术通过对视电阻率幅值、等值线形态异常范围等演变趋势的对比分析来实现隐患—灾害的 预警,在测量时,可一次供电实现多组数据的测量,从而减少了供电次数和测量电测传感 器跑极次数,大大降低测量时间,提高了野外测量工效,但是其探测手段单一、隐患探查 效率低、预警预报难。
技术实现要素:
7.本发明的目的在于提供一种车载堤防险情隐患探测系统及预警方法,以解决上述背景 技术中提出的问题。
8.为实现上述目的,本发明提供如下技术方案:
9.一种车载堤防险情隐患探测系统,包括车载平台、与车载平台相连接的探地雷达、瞬 变电磁仪,以及安装在车载平台上顶部的边坡雷达、三维激光扫描仪、云台摄像机、rtk 定位系统、多功能气象站,其特征在于,所述探地雷达由雷达主机及收发天线组成,其中 收
发天线为400mhz与200mhz的中、低频屏蔽组合天线;所述瞬变电磁仪由收发主机及 收发线圈组成,其中收发线圈采用模块化多匝线圈;
10.所述rtk定位系统分别布置在探地雷达的中、低频屏蔽组合天线的末端位置以及与瞬 变电磁仪的收发线圈的中心位置;所述云台摄像机用于对堤坝监测区域进行大范围扫描监 视,实时获取视频和图像信息;所述多功能气象站用于监测堤坝现场的风速、风向、大气 温度、相对湿度、大气气压、降雨量的气象数据。
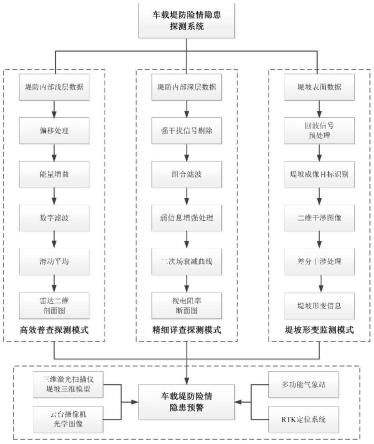
11.作为本发明再进一步的方案:该探测系统包括三种工作模式,分别为高效普查探测模 式、精细详查探测模式以及堤坡形变监测模式;
12.所述高效普查探测模式的工作方法如下:
13.将车载平台以不小于5公里/小时的行进速度沿堤坝顶部道路缓慢行驶;通过发射天线 连续拖动的方式向地下持续发射窄脉冲宽带高频电磁波信号,电磁波信号在堤坝内部传播 时遇到存在电性差异的地下介质交界面时,发生反射、透射和折射;通过接收天线接收反 射电磁波信号的双程走时、幅度与相位;通过雷达主机进行数据偏移处理、回波能量增益、 数字滤波以及滑动平均处理,再经过rtk定位系统标定后,实时计算出地下介质交界面 的深度,以获得堤防内部浅层的雷达二维剖面图,便可依据图像所表示的空间位置对地下 介质的位置和状况进行判断,可快速、全面、精准地探测堤防内部不浅于5米隐患的空间 位置、结构及其分布;
14.所述精细详查探测模式的工作方法如下:
15.将车载平台以不小于3公里/小时的行进速度沿堤坝道路缓慢行驶;通过发射线圈供入 阶跃脉冲方波,在断电的间隙期,利用接收线圈观测二次感应电压,通过电磁仪主体进行 强干扰信号剔除、组合滤波、弱信息增强处理,获取二次场衰减曲线及视电阻率断面图; 依据不同的测点不同时刻的二次场感应电动势衰减特征初步识别出横向异常,再根据计算 视电阻率图像进行地质异常体的探测,可判读出堤防内部不浅于15米隐患的时空分布;
16.所述堤坡形变监测模式的工作方法如下:
17.将车载平台以固定点方式实现对堤坝岸坡区域全天时、全天候、高精度形变监测,通 过回波信号预处理、成像目标识别获取雷达二维干涉图像,并计算差分干涉相位,进而分 析变形量、变形速度、加速度变化趋势,对脱坡、崩塌等堤坡形变隐患进行预警;同时结 合三维激光扫描仪获取的堤坡三维模型,通过雷达图像与地形数据映射配准算法,直观对 应隐患区域位置。
18.作为本发明再进一步的方案:该探测系统可用于土石坝堤坡和混凝土坝堤坡的险情隐 患探测;其探测方法如下:
19.对于土石坝堤坡:首先采用高效普查探测模式对堤防内部浅层险情隐患进行探测;进 而在疑似堤防内部深层险情隐患的重点区域路线,采用精细详查探测模式的中频屏蔽天线 进一步探明隐患情况;最后采用堤坡形变监测模式,对重点堤坡表面的微小形变进行高精 度监测并完成三维空间建模;最终实现土石坝表层、浅层、深层堤防隐患情况的直观展示, 为现场探测人员险情隐患排查处置提供支持;在土石坝堤坡探测中,高效普查探测模式采 用400mhz中频屏蔽天线,
20.对于混凝土坝堤坡:首先采用高效普查探测模式对堤防内部浅层险情隐患进行探
电流产生的二次磁场与t1时刻负阶跃电流产生的二次磁场的代数和;只需要计算出全空间 三维地质模型的负阶跃电流二次磁场h
–
s2
(t),再结合发射电流关断时间和接收线圈的等效 面积,即可得到接收线圈中二次感应电压v
t
(t)。
42.作为本发明再进一步的方案:所述堤坡形变监测模式下,差分干涉相位的计算公 式如下:
[0043][0044]
上式(7)中,和分别为第一次和第二次扫描监测时的相位,为与形变位移 相关的相位分量,和为数据采集期间由于大气效应引起的相位分量,为其他相关噪声源引起的相位分量,2kπ为相位模糊系数,λ为边坡雷达发射的电磁波的波 长,δd为第一次和第二次扫描监测过程中目标体的形变位移量。
[0045]
一种车载堤防险情隐患预警方法,包括堤防内部险情隐患预警方法和堤坡变形预警方 法;具体如下:
[0046]
所述堤防内部险情隐患预警方法针对堤防内部不同地层深度下的空洞、蚁穴、管涌通 道、局部不密实的隐患,其基于车载堤防险情隐患探测系统中的探地雷达、瞬变电磁仪探 测成像结果,并通过基于并联深度学习网络模型的地质结构智能识别技术,将深度学习中 faster r-cnn和yolov3目标检测算法运用到探地雷达、瞬变电磁仪成像结果识别当中, 对不同地层深度下的堤防隐患目标体精准识别并直接进行预警;
[0047]
所述堤坡变形预警方法针对堤坡变形诱发的脱坡、崩塌的隐患,其基于车载堤防险情 隐患探测系统中的边坡雷达时间序列形变位移信息,结合三维激光扫描仪获取的堤坡三维 模型,通过设立预警等级、预警参数,对堤坡监测区域变形隐患进行分级预警,并基于速 度倒数法预报模型对险情发生时间进行研判。
[0048]
作为本发明再进一步的方案:所述堤坡变形预警方法的具体步骤如下:
[0049]
s1、依据堤坡监测区域实际需求,设立四个预警等级,从高到低分别为:红色预警、 紫色预警、黄色预警、蓝色预警;每个等级对应四个预警参数,预警参数分为短期预警值 ds、长期预警值d
l
、预警面积s
ew
、预警持续时间t
ew
;
[0050]
s2、利用堤坡加速变形阶段的边坡雷达时序形变位移数据diff(xi,yi)与预警形变值对 比,同时超过短期预警值、长期预警值、预警面积的情况下,即:
[0051]
{diff(xi,yi)》ds∩diff(xi,yi)》d
l
∩∑s(xi,yi)》s
ew
}
ꢀꢀ
(8)
[0052]
则转入搜索预警区域判断,若未搜索到预警区域则结束预警流程;若搜索到预警区域 则转入预警状态判断;若处于预警状态则为当前预警追加一条节点信息并结束预警流程; 若不处于预警状态则转入预警持续时间判断;若未达到预警持续时间则结束预警流程,若 达到预警持续时间则生成预警记录和对应的节点信息,并结束预警流程,即:
[0053]
∑t(xi,yi)》t
ew
ꢀꢀ
(9)
[0054]
s3、当触发红色预警时基于加速变形阶段的速度数据,通过速度倒数法进行堤坡临滑 前短期预报;假设在堤坡下滑时刻其变形速度为无穷大,通过速度倒数值与时间的线性趋 势线在时间轴上相交点,即为脱坡时间tf;开始点之后的速度倒数与时间的线性拟合关系 式为
[0055]
[0056]
上式(10)中,a和b为所监测堤坡变形常数,t
sp
为预测模型所用数据的开始时间;
[0057]
当时即可得脱坡时间上式(10)可改写为:
[0058][0059]
对上式(11)进行积分得:
[0060][0061]
式中,c为积分常数项;在数据计算开始点以后的堤坡累计形变位移值与时间关系符 合式(10)的对数函数,应用对数函数模型进行数据点拟合,获得a和b参数,便可计算出 预测的脱坡时间点。
[0062]
作为本发明再进一步的方案:所述s1步骤中短期预警值、长期预警值、预警面积和预 警持续时间的具体使用方法如下:
[0063]
短期预警值:在同一等级下进行预警校验时,优先使用短期预警值校验,对应一个小 时内的数据搜索预警区域;
[0064]
长期预警值:若根据短期预警值进入预警流程后未触发预警,则进行长期预警值校验, 对应24小时内的数据搜索预警区域;
[0065]
预警面积:当合并的短期/长期雷达监测数据中存在达到预警值的点,那么开始预警 面积判断,当连续点超过预警值且连续点面积达到预警面积,则触发预警;
[0066]
预警持续时间:单次触发预警不足以说明堤坡区域的危险性,可能原因为干扰、震动 等,而连续触发预警应立刻发出通知进行调查处理。
[0067]
与现有技术相比,本发明的有益效果:
[0068]
本发明通过探地雷达、瞬变电磁仪、边坡雷达、三维激光扫描仪、云台摄像机、rtk 定位系统和多功能气象站,可以全面获取堤防内部雷达剖面图、视电阻率断面图,堤坡表 面形变位移等探测结果,提升堤防隐患探测排查效能,其探测模式包括采用高效普查探测 模式、精细详查探测模式以及堤坡形变监测模式,可以克服堤防工程条件的复杂性及现场 探测条件的局限性,其预警方法包括堤防内部险情隐患预警方法和堤坡变形预警方法,可 以有效利用探测系统的数据结果对堤防险情隐患进行综合研判,进而可对堤防内部不同地 层深度下的空洞、蚁穴、管涌通道、局部不密实及堤坡变形等险情隐患进行探测和预警, 保障人民群众的生命财产安全。
附图说明
[0069]
图1为一种车载堤防险情隐患探测系统的结构示意图;
[0070]
图2为一种车载堤防险情隐患预警方法的流程示意图。
具体实施方式
[0071]
本发明实施例中,一种车载堤防险情隐患探测系统,包括车载平台、与车载平台相连 接的探地雷达、瞬变电磁仪,以及安装在车载平台上顶部的边坡雷达、三维激光扫描仪、 云台摄像机、rtk定位系统、多功能气象站,其特征在于,探地雷达由雷达主机、收发天 线组成,其中收发天线为400mhz与200mhz的中、低频屏蔽组合天线,该屏蔽天线具有抗 干扰性
强,分辨率高并且理论最大探深可达到10m,满足堤防内部浅层隐患探测要求;瞬 变电磁仪由收发主机及收发线圈组成,其中收发线圈采用模块化多匝线圈;
[0072]
rtk定位系统分别布置在探地雷达的中、低频屏蔽组合天线的末端位置以及与瞬变电 磁仪的收发线圈的中心位置,从而可准确标记探地雷达、瞬变电磁仪探测堤防隐患的空间 位置,便于堤防检测人员进行隐患排查处置;云台摄像机用于对堤坝监测区域进行大范围 扫描监视,实时获取视频和图像信息;多功能气象站用于监测堤坝现场的风速、风向、大 气温度、相对湿度、大气气压、降雨量的气象数据,对探地雷达、瞬变电磁仪、边坡雷达 监测结果进行及时研判分析,如图1。
[0073]
优选的,该探测系统包括三种工作模式,分别为高效普查探测模式、精细详查探测模 式以及堤坡形变监测模式;
[0074]
高效普查探测模式的工作方法如下:
[0075]
将车载平台以不小于5公里/小时的行进速度沿堤坝顶部道路缓慢行驶,基本线距为 2m,存在疑似隐患时可加密至1m,在背水坡坝脚附近可放宽至4m;通过发射天线连续拖 动的方式向地下持续发射窄脉冲宽带高频电磁波信号,电磁波信号在堤坝内部传播时遇到 存在电性差异(如介电常数差异)的地下介质交界面时,发生反射、透射和折射;通过接 收天线接收反射电磁波信号的双程走时、幅度与相位;通过雷达主机进行数据偏移处理、 回波能量增益、数字滤波以及滑动平均处理,再经过rtk定位系统标定后,实时计算出地 下介质交界面的深度,以获得堤防内部浅层的雷达二维剖面图,便可依据图像所表示的空 间位置对地下介质的位置和状况进行判断,可快速、全面、精准地探测堤防内部不浅于5 米隐患的空间位置、结构及其分布;具体地:可对深度在8m以内、不小于0.4m
×
0.3m
×
0.3m (长
×
宽
×
高)的不规则空洞进行有效探测;可对深度在5m以内、不小于1m3的蚁穴进行 有效探测;可对深度在8m以内、截面积不小于0.2m2的管涌通道进行有效探测;
[0076]
精细详查探测模式的工作方法如下:
[0077]
将车载平台以不小于3公里/小时的行进速度沿堤坝道路缓慢行驶,基本线距为2m,测 点间距1m;存在疑似隐患时线距可加密至1m,测点间距可加密至0.5m;通过发射线圈供入 阶跃脉冲方波,在断电的间隙期,利用接收线圈观测二次感应电压,通过电磁仪主体进行 强干扰信号剔除、组合滤波、弱信息增强处理,获取二次场衰减曲线及视电阻率断面图; 依据不同的测点不同时刻的二次场感应电动势衰减特征初步识别出横向异常,再根据计算 视电阻率图像进行地质异常体的探测,可判读出堤防内部不浅于15米隐患的时空分布,具 体地:
[0078]
可对深度在20m以内、不小于0.5m
×
0.5m
×
0.3m(长
×
宽
×
高)的不规则空洞进行有 效探测;可对深度在15m以内、不小于1.5m3的蚁穴进行有效探测;可对深度在20m以内、截 面积不小于0.2m2的管涌通道进行有效探测;
[0079]
堤坡形变监测模式的工作方法如下:
[0080]
将车载平台以固定点方式实现对堤坝岸坡区域全天时、全天候、高精度形变监测,通 过回波信号预处理、成像目标识别获取雷达二维干涉图像,并计算差分干涉相位,进而分 析变形量、变形速度、加速度变化趋势,对脱坡、崩塌等堤坡形变隐患进行预警;同时结 合三维激光扫描仪获取的堤坡三维模型,通过雷达图像与地形数据映射配准算法,直观对 应隐患区域位置。
[0081]
优选的,该探测系统可用于土石坝堤坡和混凝土坝堤坡的险情隐患探测;其探测方法 如下:
[0082]
对于土石坝堤坡:首先采用高效普查探测模式对堤防内部浅层险情隐患进行探测;进 而在疑似堤防内部深层险情隐患的重点区域路线,采用精细详查探测模式的中频屏蔽天线 进一步探明隐患情况;最后采用堤坡形变监测模式,对重点堤坡表面的微小形变进行高精 度监测并完成三维空间建模;最终实现土石坝表层、浅层、深层堤防隐患情况的直观展示, 为现场探测人员险情隐患排查处置提供支持;在土石坝堤坡探测中,高效普查探测模式采 用400mhz中频屏蔽天线,
[0083]
对于混凝土坝堤坡:首先采用高效普查探测模式对堤防内部浅层险情隐患进行探测; 进而在疑似堤防内部深层险情隐患的重点区域路线,采用精细详查探测模式进一步探明隐 患情况,在混凝土坝堤坡探测中,高效普查探测模式采用200mhz中频屏蔽天线。
[0084]
优选的,高效普查探测模式下,地下介质交界面的深度h的计算公式如下:
[0085][0086]
上式(1)中,v为电磁波传播速度,t为单个脉冲的往返时间,x为探地雷达的水平位 移;
[0087]
当地下介质中的电磁波传播速度v确定时,可以依据精确测得的单个脉冲的往返时间t 和探地雷达的水平位移x,求出地下反射界面的深度h。
[0088]
优选的,精细详查探测模式下,二次感应电压计算方法如下:
[0089]
s21、通过在发射线圈中通入电流i0,并在目标体中产生感应电流i1(t),依据电磁感应 定律,则在目标体中产生的感应电流i1(t)的计算公式为:
[0090][0091]
上式(2)中,i0为发射线圈中通入的电流,m为发射线圈与目标体之间的互感,τ=l/r, r和l分别为目标体的阻抗以及感抗;
[0092]
s22、再通过感应电流i1(t)激发感应磁场h2(t),感应磁场h2(t)的计算公式如下:
[0093]
h2(t)=lv0sinθ/i1(t)
ꢀꢀ
(3)
[0094]
上(3)式中,v0为目标体切割磁场的速度,l为切割磁场的目标体长度,θ为目标体 切割磁场的角度;
[0095]
s23、通过发射线圈产生发射电流i(t),并通过发射电流i(t)激发二次磁场h2(t),二 次磁场h2(t)的计算公式如下:
[0096]hi2
(t)=h2(t)/i(t)
ꢀꢀ
(4)
[0097]
上式(4)中,i(t)为梯形波发射电流;h
i2
(t)为全空间冲击脉冲电流二次磁场;
[0098]
s24、通过二次磁场h2(t)产生在接收线圈中二次感应电压v
t
(t),根据法拉第电磁感应 定律,二次感应电压v
t
(t)的计算公式如下:
[0099]
[0100]
上式(5)中:sr为接收线圈等效接收面积;u(t)为单位阶跃函数;t为单个脉冲的往 返时间;t0为关断开始时间;t1为完全关断时间;μ0为真空磁导率;t
off
为关断时间;h
s2
(t) 为正阶跃电流二次磁场;
[0101]
s25、根据正阶跃电流二次磁场与负阶跃电流二次磁场h
–
s2
(t)关系,可得接收线圈中 二次感应电压v
t
(t)的计算公式如下:
[0102][0103]
因此,由上式(6)可以得出,梯形波关断二次感应电压在数值上等于t0时刻负阶跃 电流产生的二次磁场与t1时刻负阶跃电流产生的二次磁场的代数和;只需要计算出全空间 三维地质模型的负阶跃电流二次磁场h
–
s2
(t),再结合发射电流关断时间和接收线圈的等效 面积,即可得到接收线圈中二次感应电压v
t
(t)。
[0104]
优选的,堤坡形变监测模式下,差分干涉相位的计算公式如下:
[0105][0106]
上式(7)中,和分别为第一次和第二次扫描监测时的相位,为与形变位移 相关的相位分量,和为数据采集期间由于大气效应引起的相位分量,为其他相关噪声源引起的相位分量,2kπ为相位模糊系数,λ为边坡雷达发射的电磁波的波 长,δd为第一次和第二次扫描监测过程中目标体的形变位移量。
[0107]
一种车载堤防险情隐患预警方法,包括堤防内部险情隐患预警方法和堤坡变形预警方 法,从而可有效利用探测系统的数据结果对堤防险情隐患进行综合研判;具体如下:
[0108]
堤防内部险情隐患预警方法针对堤防内部不同地层深度下的空洞、蚁穴、管涌通道、 局部不密实的隐患,其基于车载堤防险情隐患探测系统中的探地雷达、瞬变电磁仪探测成 像结果,并通过基于并联深度学习网络模型的地质结构智能识别技术,将深度学习中 faster r-cnn和yol0v3目标检测算法运用到探地雷达、瞬变电磁仪成像结果识别当中,对 不同地层深度下的堤防隐患目标体精准识别并直接进行预警,如图2所示;
[0109]
堤坡变形预警方法针对堤坡变形诱发的脱坡、崩塌的隐患,其基于车载堤防险情隐患 探测系统中的边坡雷达时间序列形变位移信息,结合三维激光扫描仪获取的堤坡三维模型, 通过设立预警等级、预警参数,对堤坡监测区域变形隐患进行分级预警,并基于速度倒数 法预报模型对险情发生时间进行研判。
[0110]
优选的,堤坡变形预警方法的具体步骤如下:
[0111]
s1、依据堤坡监测区域实际需求,设立四个预警等级,从高到低分别为:红色预警、 紫色预警、黄色预警、蓝色预警;每个等级对应四个预警参数,预警参数分为短期预警值 ds、长期预警值d
l
、预警面积s
ew
、预警持续时间t
ew
;
[0112]
s2、利用堤坡加速变形阶段的边坡雷达时序形变位移数据diff(xi,yi)与预警形变值对 比,同时超过短期预警值、长期预警值、预警面积的情况下,即:
[0113]
{diff(xi,yi)》ds∩diff(xi,yi)》d
l
∩∑s(xi,yi)》s
ew
}
ꢀꢀ
(8)
[0114]
则转入搜索预警区域判断,若未搜索到预警区域则结束预警流程;若搜索到预警区域 则转入预警状态判断;若处于预警状态则为当前预警追加一条节点信息并结束预警流程; 若不处于预警状态则转入预警持续时间判断;若未达到预警持续时间则结束预警流
程,若 达到预警持续时间则生成预警记录和对应的节点信息,并结束预警流程,即:
[0115]
∑t(xi,yi)》t
ew
ꢀꢀ
(9)
[0116]
s3、当触发红色预警时基于加速变形阶段的速度数据,通过速度倒数法进行堤坡临滑 前短期预报;假设在堤坡下滑时刻其变形速度为无穷大,通过速度倒数值与时间的线性趋 势线在时间轴上相交点,即为脱坡时间tf;开始点之后的速度倒数与时间的线性拟合关系 式为
[0117][0118]
上式(10)中,a和b为所监测堤坡变形常数,t
sp
为预测模型所用数据的开始时间;
[0119]
当时即可得脱坡时间上式(10)可改写为:
[0120][0121]
对上式(11)进行积分得:
[0122][0123]
式中,c为积分常数项;在数据计算开始点以后的堤坡累计形变位移值与时间关系符 合式(10)的对数函数,应用对数函数模型进行数据点拟合,获得a和b参数,便可计算出 预测的脱坡时间点。
[0124]
优选的,s1步骤中短期预警值、长期预警值、预警面积和预警持续时间的具体使用方 法如下:
[0125]
短期预警值:在同一等级下进行预警校验时,优先使用短期预警值校验,对应一个小 时内的数据搜索预警区域;
[0126]
长期预警值:若根据短期预警值进入预警流程后未触发预警,则进行长期预警值校验, 对应24小时内的数据搜索预警区域;
[0127]
预警面积:当合并的短期/长期雷达监测数据中存在达到预警值的点,那么开始预警 面积判断,当连续点超过预警值且连续点面积达到预警面积,则触发预警;
[0128]
预警持续时间:单次触发预警不足以说明堤坡区域的危险性,可能原因为干扰、震动 等,而连续触发预警应立刻发出通知进行调查处理。
[0129]
以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此, 任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其 发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1