机器人的地图生成方法、机器人及清洁系统与流程
本公开涉及机器人,具体涉及一种机器人的地图生成方法、机器人及清洁系统。
背景技术:
1、随着机器人技术的发展,机器人根据slam算法(simultaneous localization andmapping,同步定位与地图构建)边行走边探索构图,以便生成地图。由于机器人采用自动导航方式自动构图,受限于传感数据漂移、环境复杂等因素,机器人容易误判地图已封闭,便结束探索和结束地图生成操作,如此会导致机器人容易遗漏部分区域未进行构图,构图覆盖率不高。
2、公开内容
3、本公开实施例的一个目的旨在提供一种机器人的地图生成方法、机器人及清洁系统,旨在改善现有技术构图覆盖率不高的问题。
4、在第一方面,本公开实施例提供一种机器人的地图生成方法,包括:
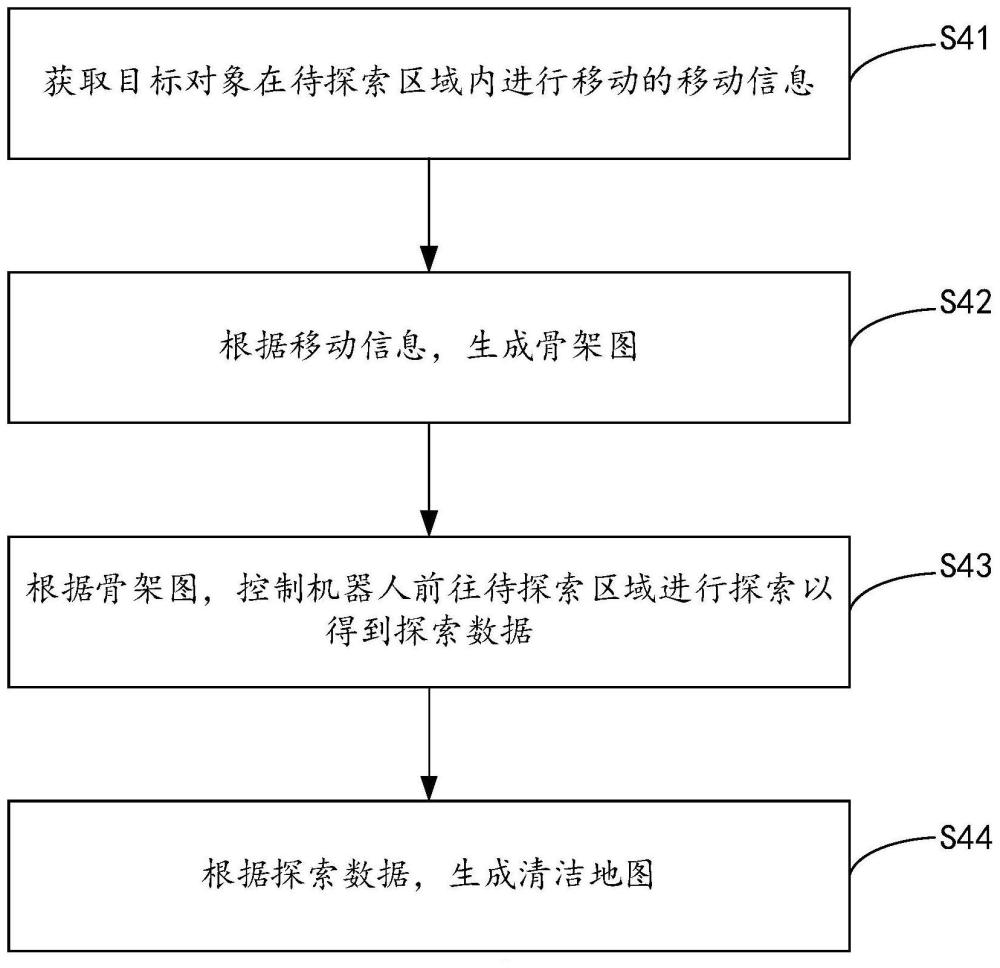
5、获取目标对象在待探索区域内进行移动的移动信息;
6、根据所述移动信息,生成骨架图;
7、根据所述骨架图,控制所述机器人前往所述待探索区域进行探索以得到探索数据;
8、根据所述探索数据,生成清洁地图。
9、可选地,所述移动信息包括移动速度及移动姿态,所述获取目标对象在待探索区域内进行移动的移动姿态信息包括:
10、当目标对象在待探索区域内进行移动时,获取所述目标对象的目标点云信息;
11、根据所述目标点云信息,计算观测速度及观测姿态;
12、将所述观测速度及所述观测姿态输入卡尔曼滤波器,得到移动速度及移动姿态。
13、可选地,所述移动信息包括移动速度及移动姿态,所述根据所述移动信息,生成骨架图包括:
14、根据所述移动姿态,控制所述机器人按照所述移动速度跟随所述目标对象;
15、记录所述机器人跟随所述目标对象的骨架路径及骨架点;
16、根据所述骨架点及所述骨架路径,生成骨架图。
17、可选地,所述记录所述机器人跟随所述目标对象的骨架路径及骨架点包括:
18、记录所述机器人跟随目标对象时的每个位置点,其中,按照时间排序的多个所述位置点可形成骨架路径;
19、获取位置记录命令,根据所述位置记录命令将所述机器人的当前位置点记录为骨架点。
20、可选地,所述骨架图包括骨架路径及骨架点,所述根据所述骨架图,控制所述机器人前往所述待探索区域进行探索以得到探索数据包括:
21、确定目标骨架点,所述目标骨架点为多个所述骨架点中的一个;
22、根据所述骨架路径,控制所述机器人导航至所述目标骨架点;
23、控制所述机器人探索所述目标骨架点所在的待探索区域,得到探索数据。
24、可选地,所述根据所述探索数据,生成清洁地图包括:
25、根据所述探索数据,按照预设频率更新清洁地图;
26、判断所述目标骨架点所在的待探索区域是否已探索完毕;
27、若已探索完毕,则控制所述机器人导航至下一个目标骨架点;
28、若未探索完毕,则控制所述机器人在所述目标骨架点所在的待探索区域继续探索。
29、可选地,所述判断所述目标骨架点所在的待探索区域是否已探索完毕包括:
30、判断所述目标骨架点所在的待探索区域是否存在探索导航点,所述探索导航点为所述机器人对所述待探索区域进行探索的位置点;
31、若存在,则确定所述目标骨架点所在的待探索区域未探索完毕;
32、若不存在,则确定所述目标骨架点所在的待探索区域已探索完毕。
33、可选地,所述目标骨架点所在的待探索区域包括已构图区域和待构图区域,所述判断所述目标骨架点所在的待探索区域是否存在探索导航点包括:
34、根据探索收益算法,在所述已构图区域上确定最大探索收益值的已探索点;
35、判断所述最大探索收益值是否大于临界阈值;
36、若大于,则确定所述目标骨架点所在的待探索区域存在探索导航点;
37、若小于或等于,则确定所述目标骨架点所在的待探索区域不存在探索导航点。
38、在第二方面,本公开实施例提供一种机器人,包括:
39、至少一个处理器;以及,
40、与所述至少一个处理器通信连接的存储器;其中,
41、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的机器人的地图生成方法。
42、在第三方面,本公开实施例提供一种清洁系统,包括:
43、上述的机器人;及
44、服务器,所述服务器与所述机器人通信连接。
45、在本公开实施例提供的机器人的地图生成方法中,获取目标对象在待探索区域内进行移动的移动信息,根据移动信息,生成待探索区域的骨架图,根据骨架图,控制机器人前往待探索区域进行探索以得到探索数据,根据探索数据,生成清洁地图。本实施例在骨架图的指引下,能够高覆盖率地探索骨架图所涉及的待探索区域,以便能够生成覆盖面较广的清洁地图,如此提高了构图覆盖率。另外,由于骨架图是根据目标对象的移动信息生成的,通常目标对象的移动都是比较安全可靠的移动,因此,机器人根据骨架图进行移动以生成清洁地图时,机器人的安全性和可靠性都比较高。同时,机器人能够自动跟随目标对象,无需人为控制机器人,有利于提高构图效率。
技术实现思路
技术特征:
1.一种机器人的地图生成方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述移动信息包括移动速度及移动姿态,所述获取目标对象在待探索区域内进行移动的移动姿态信息包括:
3.根据权利要求1所述的方法,其特征在于,所述移动信息包括移动速度及移动姿态,所述根据所述移动信息,生成骨架图包括:
4.根据权利要求3所述的方法,其特征在于,所述记录所述机器人跟随所述目标对象的骨架路径及骨架点包括:
5.根据权利要求1所述的清洁方法,其特征在于,所述骨架图包括骨架路径及骨架点,所述根据所述骨架图,控制所述机器人前往所述待探索区域进行探索以得到探索数据包括:
6.根据权利要求5所述的清洁方法,其特征在于,所述根据所述探索数据,生成清洁地图包括:
7.根据权利要求6所述的清洁方法,其特征在于,所述判断所述目标骨架点所在的待探索区域是否已探索完毕包括:
8.根据权利要求7所述的清洁方法,其特征在于,所述目标骨架点所在的待探索区域包括已构图区域和待构图区域,所述判断所述目标骨架点所在的待探索区域是否存在探索导航点包括:
9.根据权利要求6所述的清洁方法,其特征在于,还包括:
10.一种机器人,其特征在于,包括:
11.一种清洁系统,其特征在于,包括:
技术总结
本公开涉及机器人技术领域,公开了一种机器人的地图生成方法、机器人及清洁系统。方法包括:获取目标对象在待探索区域内进行移动的移动信息,根据移动信息,生成骨架图,根据骨架图,控制机器人前往待探索区域进行探索以得到探索数据,根据探索数据,生成清洁地图。本实施例在骨架图的指引下,能够高覆盖率地探索骨架图所涉及的待探索区域,以便生成覆盖面较广的清洁地图,如此提高了构图覆盖率。由于骨架图是根据目标对象的移动信息生成的,通常目标对象的移动都是比较安全可靠的,机器人根据骨架图进行移动以生成清洁地图时,机器人的安全性和可靠性都比较高。同时,机器人能够自动跟随目标对象,无需人为控制机器人,有利于提高构图效率。
技术研发人员:阳方平,任亮亮,吴胜凯,武康康
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!