一种煤矿井下移动测量机器人、安全评价方法及系统与流程
1.本技术涉及智能检测技术领域,尤其涉及一种煤矿井下移动测量机器人、安全评价方法及系统。
背景技术:
2.煤矿井下地质环境较差,随着开采深度增加,井下巷道愈发复杂,对巷道空间环境测量的专业装备较少,多以手持式、背负式激光雷达测量设备为主,结合行走轨迹对数据进一步处理,形成巷道空间数据。对于掘进巷道等重点区域,安全员一般采用便携式检测设备与裸眼经验判断的传统安全评价方式。掘进工作面完成爆破作业后,一般由安全员进入掘进工作面利用烟气传感器等进行爆破区域的有害气体检测,利用全站仪等设备进行爆破后巷道成形质量的测量。常用的检测设备有全站仪、经纬仪、水准仪、钢尺,将测量结果与设计图纸进行对照,以便评价掘进巷道的安全状况。现有的,安全员利用上述检测设备进行检测的方法,测量不精准并且严重威胁安全员人身安全。
3.目前,手持式或背负式激光雷达测量设备是以行人的位置为基准,基准位置的误差对巷道整体的探测精度影响较大,严重影响煤矿地理三维空间模型的质量;对于掘进巷道等重点区域,传统的安全评价方式难以精准评价对出矿进路顶板围岩稳定性的影响,同时,掘进后存在顶板不稳定现象,严重威胁安全员人身安全。
4.因此,目前亟需提供一种安全性较高、测量准确度高的机器人和提高安全评价准确度的评价方法。
技术实现要素:
5.本技术的目的在于提供一种煤矿井下移动测量机器人、安全评价方法及系统,对煤矿井下巷道空间以及掘进工作面等重点区域进行安全评价,辅助分析巷道围岩稳定性,提高了煤矿井下监测的安全性和监测的准确度,以及安全评价的准确度。
6.为达到上述目的,本技术提供一种煤矿井下移动测量机器人,包括:移动平台和搭载在所述移动平台上的移动测量设备,所述移动测量设备包括slam扫描单元、环境气体检测传感单元以及地质雷达检测单元;
7.所述移动平台,用于在巷道内自主行走;
8.所述slam扫描单元,用于采集巷道空间数据;
9.所述地质雷达检测单元,用于采集地质体内部数据;
10.所述环境气体检测传感单元,用于采集有害气体浓度指标数据;
11.所述slam扫描单元、所述地质雷达检测单元和所述环境气体检测传感单元均与管理平台通信连接,并将采集的数据上传至所述管理平台。
12.如上所述的煤矿井下移动测量机器人,其中,还包括自动识别避让系统和主控系统,所述自动识别避让系统与所述移动平台通信连接;所述自动识别避让系统和所述移动平台与所述主控系统通信连接;
13.所述自动识别避让系统识别到障碍物后,向所述主控系统发出障碍物警告信息;
14.所述主控系统接收到障碍物警告信息后,控制所述移动平台避开障碍物行驶。
15.如上所述的煤矿井下移动测量机器人,其中,所述移动平台为履带式移动平台。
16.如上所述的煤矿井下移动测量机器人,其中,还包括集成多种传感器的三维移动测量系统,三维移动测量系统用于对所述移动测量设备进行定位定姿。
17.如上所述的煤矿井下移动测量机器人,其中,三维移动测量系统包括惯性导航、里程计传感器和控制网辅助模块。
18.本技术还提供一种煤矿井下安全评价方法,该方法包括:
19.应用于煤矿井下移动测量机器人:
20.根据巡检任务的要求,规划行进路径;
21.沿着行进路径行进,实时采集巷道围岩数据、工作面的有害气体浓度指标数据和巷道全景扫描数据;
22.根据巷道全景扫描数据,生成巷道三维实体模型;
23.将采集的巷道围岩数据、工作面的有害气体浓度指标数据和巷道三维实体模型通过网络上传至管理平台,管理平台用于对上传的数据进行分析处理,获取煤矿井下安全评价结果。
24.如上所述的煤矿井下安全评价方法,其中,管理平台获取煤矿井下安全评价结果的方法包括:
25.获取掘进工作面爆破作业后巷道的第一扫描数据,并根据第一扫描数据,确定巷道岩体内部的异常区域;
26.获取异常区域内不同水平面的第二扫描数据,得到巷道岩体内部异常区域的水平测量数据;
27.获取异常区域内不同垂直面的第三扫描数据,得到巷道岩体内部异常区域的垂直测量数据;
28.将异常区域的水平测量数据和垂直测量数据拟合至巷道三维激光扫描数据中,对巷道内部岩体的异常结构进行判别。
29.如上的,其中,根据巷道全景扫描数据,生成巷道三维实体模型的方法包括:
30.对多组巷道全景扫描数据进行预处理;
31.将预处理后的数据统一配准整合在一起,得到地下矿山整体空间三维数据;
32.在地下矿山整体空间三维数据的基础上,对巷道的点云进行建模,自动生成巷道模型;
33.对巷道模型的拼接,形成井下巷道模型的更新和延伸趋势,进而获得巷道三维实体模型。
34.如上的,其中,巷道三维激光扫描数据的获取方法为:在掘进工作面巷道中,沿巷道开拓方向进行slam扫描,获取巷道三维激光扫描数据。
35.本技术还提供一种煤矿井下安全评价系统,包括煤矿井下移动测量机器人,以及管理平台;所述煤矿井下移动测量机器人采集巷道内的安全评价数据,并将采集的安全评价数据上传至所述管理平台;所述管理平台对所述煤矿井下移动测量机器人采集的数据进行分析处理,获取煤矿井下安全评价结果。
36.本技术实现的有益效果如下:
37.(1)本技术面向掘进工作面爆破作业后的巷道环境,基于履带式移动平台设计的可伸缩支撑机构,搭载slam激光扫描、环境气体探测、地质雷达监测单元,实现感知设备的自主移动测量;
38.(2)本技术机器人通过搭载地质雷达对掘进工作面前端进行扫描,能够辨识顶板围岩稳定性。
39.(3)本技术通过井下巷道全景扫描后,对采集的扫描数据进行处理分析,生成井下巷道三维实体模型,利用巷道三维实体模型与设计施工图进行对比,完成巷道施工质量验收工作。通过对比多个时间段的实体模型变化情况,辅助分析巷道围岩稳定性。
40.(4)本技术通过机器人的自主巡检,实现了掘进工作面爆破初期巷道安全及质量的快速评价,减少了危险环境下的作业人员,提高了掘进工作面的智能化水平。
附图说明
41.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域技术人员来讲,还可以根据这些附图获得其他的附图。
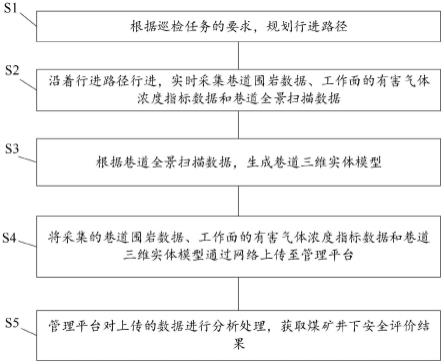
42.图1为本技术实施例的一种煤矿井下安全评价方法的流程图。
43.图2为本技术实施例的管理平台对巷道内部岩石进行异常判别的方法流程图。
44.图3为本技术实施例的获得巷道三维实体模型的方法流程图。
45.图4为本技术实施例的一种煤矿井下移动测量机器人的结构组成示意图。
46.图5为本技术实施例的硬件系统和软件系统的结构示意图。
47.图6为本技术实施例的系统定位定姿的方法示意图。
48.图7为本技术实施例的三维移动测量系统的通信连接示意图。
49.附图标记:10-移动平台;20-slam扫描单元;30-环境气体检测传感单元;40-地质雷达检测单元;100-煤矿井下移动测量机器人;200-管理平台。
具体实施方式
50.下面结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
51.现有技术中,掘进工作面完成爆破作业后,一般由安全员进入掘进工作面利用烟气传感器等进行爆破区域的有害气体检测,利用全站仪等设备进行爆破后巷道成形质量的测量。上述工作,需要安全员进入掘进工作面使用检测装置进行检测,使安全员存在人身安全隐患。本技术采用移动测量机器人目的在于爆破作业后初期替代安全员的上述工作,本技术采用的移动测量机器人具备在掘进工作面自主行走的能力,同时加装检测有害气体的传感单元和测量巷道的扫描装置,由于移动测量机器人主要用于完成掘进工作面放炮后的巡检工作,采集该区域环境数据并上传至管理平台,通过管理平台分析回采工作面安全情
况,确保安全后安排出矿人员和设备进入矿井进行出矿作业。
52.实施例一
53.如图4所示,本技术提供一种煤矿井下移动测量机器人100,包括:移动平台10和搭载在移动平台10上的移动测量设备,移动测量设备包括slam扫描单元20、环境气体检测传感单元30以及地质雷达检测单元40;移动平台10,用于在巷道内自主行走;slam扫描单元20,用于采集巷道空间数据;地质雷达检测单元40,用于采集地质体内部数据;环境气体检测传感单元30,用于采集有害气体浓度指标数据;slam扫描单元20、地质雷达检测单元40和环境气体检测传感单元30均与管理平台200通信连接,并将采集的数据上传至管理平台200。
54.作为本发明的具体实施例,移动平台10具有空间位置信息交互、移动检测协同控制、坐标变换、运动学分析、自主行走和自主充电等功能。slam扫描单元20具有巷道成形尺寸测量、巷道连续测量、移动本体协同作业和重点区域精准测量等功能,slam扫描单元20采用的slam扫描技术能够对视觉信息和激光雷达数据进行地图构建和三维重现,所构建的地图和三维模型用于巷道安全或质量评价。环境气体检测传感单元30具有环境气体检测、粉尘浓度测量、移动本体协同作业和重点区域精准测量等功能。地质雷达检测单元40具有巷道围岩稳定性探测、多参数检测协调、移动本体协同作业和重点区域精准测量等功能。
55.作为本发明的具体实施例,管理平台200设置在pc端或移动端。管理平台200提供质量评价、三维可视化、辅助决策和移动app等应用。
56.作为本发明的具体实施例,煤矿井下移动测量机器人还包括自动识别避让系统和主控系统,自动识别避让系统与移动平台10通信连接;自动识别避让系统和移动平台10与主控系统通信连接;自动识别避让系统识别到障碍物后,向主控系统发出障碍物警告信息;主控系统接收到障碍物警告信息后,控制移动平台10避开障碍物行驶。
57.移动平台10是机器人运动的载体。掘进工作面形成初期,巷道地面平整度不高,轮式移动平台难以满足在巷道稳定行走的要求,因此,移动测量机器人选用履带式移动平台作为机器人的运动载体。
58.优选的,履带式移动平台上固定连接有可伸缩支撑机构,可伸缩支撑机构为气缸实现伸缩,可伸缩支撑机构,搭载slam激光扫描、环境气体探测、地质雷达监测单元,实现感知设备的自主移动测量。
59.作为本发明的具体实施例,移动平台10的性能指标包括:最小离地间隙20cm;负载能力不小于80kg;工作行驶速度不小于0.5m/s;最大行驶速度1.5m/s;爬坡角度不小于30
°
;越障能力15cm高20cm宽;连续工作时间》5h;涉水深不小于20cm;电池为锂电池36v;通讯方式为wifi/4g/5g;工作环境温度0-50℃;防护性能ip65。
60.具体的,slam扫描单元20为在移动平台10上搭载的slam扫描装置,利用slam扫描装置重量轻、体积小的特点,对井下巷道进行全面的快速测量,通过测量,获取矿山地下三维空间数据,用于巷道质量评价。通过打开slam扫描装置让其沿着巷道进行作业便可实现对巷道的三维数据采集,在采集过程中slam扫描装置内部采用slam技术,实现数据的实时自动拼接和处理,简化后期管理平台200数据处理流程。
61.作为本发明的具体实施例,slam扫描装置的主要技术指标包括:最大测距为30m;数据获取速率为43200点/秒;分辨率为水平0.625
°
,垂直1.8
°
;视场角范围为0-270
°
;电源
电压为14.8v;电源电流为2.5a;工作温度0-30℃;默认输出文件格式为las/ply/e57;通用性:兼容主流cad;图形化用户界面兼容主流平板或手机;相对精度为
±
1cm;绝对精度为3-30cm(10分钟扫描);激光安全等级为人眼一级安全激光;激光波长为905nm;扫描线速率为100hz;旋转速率为0.5hz。
62.作为本发明的具体实施例,环境气体检测传感单元30的搭载载体为移动测量机器人的移动平台10。环境气体检测传感单元30的电源供电、数据传输、位置更新均依赖于移动测量机器人,因此,对环境气体检测传感单元30的功耗、体积等参数有着严格的要求,多种参数的智能传感器能够适应集成度高的要求,各个传感器插槽可任意组合,传感器可现场任意互换,增强检测的灵活性。机器人搭载的环境气体检测传感单元30满足的技术指标包括:检测气体类型为粉尘、co、so2、o2和co2;报警方式为声音报警、红色led报警灯或振动报警;显示为lcd图形显示;背光为手动或报警时自动;工作温度为-20℃-+50℃;工作湿度为0%
‑‑
95%rh(非冷凝);直接读数包括测量值,电池电量,数据记录状态,泵状态;采样方式为泵吸式/扩散式;数据记录为1分钟间隔采集一次,可存储6个月;记录间隔为1-3600秒;防护等级为ip65;标定设备支持autorae lite 2自动标定平台;标定为两点标定;保护措施为标定、报警等限值设置有密码保护。
63.具体的,地质雷达检测单元40采用地质雷达技术,地质雷达技术是一种利用高频电磁波技术探测地下结构体的手段,能够根据现场探测显示异常区域,增强对内部结构的了解和数据掌握。地质雷达技术采用现场成像的方式,能够对巷道内部结构进行现场分析,探测深度可以达到6-8m,能够满足掘进工作面爆破后初期对巷道质量和危险源的评价。地质雷达检测单元40重量为4-5kg,在巷道检测过程中以机器人为载体,以移动平台10基坐标为参考坐标系,将探头位置及探测位置数据与移动平台10位置信息相结合,增强对危险源的评价和定位。
64.为满足煤矿作业环境快速获取巷道三维空间数据(巷道空间数据)的需求,本发明移动测量机器人还包括集成多种传感器的三维移动测量系统。
65.具体的,三维移动测量系统采用了多传感器实时显控技术、时空标定技术,高速数据采集、存储与管理技术,移动地理坐标框架、系统定位与定姿技术,多源数据融合技术,多源数据应用软件等。
66.如图6所示,三维移动测量系统包括惯性导航、里程计传感器和控制网辅助模块,惯性导航和里程计传感器和控制网辅助模块接收卫星信号后,采集移动测量设备的位置和姿态信息,对移动测量设备进行定位定姿。具体的,控制网辅助模块由控制网和立体条码标靶组成;惯性导航和里程计传感器采集移动测量设备的位置和姿态信息,并结合控制网辅助模块标定的移动测量设备的位置和姿态信息,对移动测量设备进行定位定姿,实现移动测量设备定位定姿的有效精度控制,保证煤矿地下三维数据质量的整体可靠性。
67.作为本发明的具体实施例,三维移动测量系统采用的系统定位与定姿技术如下:
68.为解决煤矿地下空间没有卫星信号的定位问题,在煤矿井下,布设控制点组,建立专用地理坐标框架转换模型;选用特定立体条码标靶,将立体条码标靶贴设在控制点位,用于对移动测量设备的位置信息或姿态信息进行标定,利用条码识别技术配以高精度惯导和里程计等传感器位置和姿态信息,实现运动状态下三维移动测量系统的定位与定姿。立体条码标靶可以是射频识别标签和二维码标签等,通过识别立体条码标靶可以获得当前控制
点的位置信息。
69.为保证激光扫描仪和工业相机数据在移动平台10移动过程中准备的融合解算,选取高精度的惯导系统(惯性导航),作为位置姿态测量系统。
70.如图7所示,惯导系统与主控系统、激光雷达、工业相机和移动测量设备分别通信连接。由于煤矿地下空间没有gnss信号,移动测量设备的定位定姿数据由惯导系统提供,随着时间的累计,惯导系统的漂移量逐渐增加,由此引出的测量误差也越来越大,测量数据的可靠性快速下降。为了将测量精度保持在较高的指标,引入立体条码标靶,相当于控制点组,在煤矿井下固定位置设置立体条码标靶,通过多个立体条码标靶构建的“控制网”,辅助惯性导航和里程计等传感器对移动测量设备进行定位定姿,实现移动测量设备定位定姿的有效精度控制,提高移动测量设备定位定姿的准确度,保证煤矿地下三维数据质量的整体可靠性。
71.作为本发明的一个具体实施例,在煤矿井下布设控制网,在控制网内建立专用的坐标框架及其与国家地理坐标框架的转换模型。采用条形码识别技术,配以高精度惯导和里程计进行系统运动状态下的定位与定姿,条形码识别技术可以是射频识别技术;融合里程计、立体条码标靶数据进行空间匹配,实现移动测量设备的定位与定姿。
72.实施例二
73.如图1所示,本技术提供一种煤矿井下安全评价方法,该方法包括:
74.应用于煤矿井下移动测量机器人:
75.步骤s1,根据巡检任务的要求,规划行进路径。
76.具体的,根据巡检任务的要求获得待检测的位置信息,根据待检测的位置信息规划移动测量机器人的行进路径,使得机器人按照规划的行进路径能够对待检测的位置进行检测。优选的,向移动测量机器人派发巡检任务,移动测量机器人根据巡检任务的要求,自主规划行进路径。
77.步骤s2,沿着行进路径行进,实时采集巷道围岩数据、工作面的有害气体浓度指标数据和巷道全景扫描数据。
78.现有技术中辨识顶板围岩稳定性采用的方式是:巡检人员裸眼观测岩石类型、松散情况等属性以及顶板出水状态,结合经验分析巷道围岩稳定性,作为后续采用何种支护方式的依据,该方式需要巡检人员进入煤矿井下,巡检人员存在安全隐患,且人为判断精确度较低。因此,本发明为解决上述问题,采用如下技术手段:
79.本发明移动测量机器人沿着行进路径行进,通过移动测量机器人搭载的地质雷达检测单元40对回采进路端进行扫描,采集地质体内部数据。地质体内部数据用于辨识巷道围岩稳定性。从而避免了巡检人员进入煤矿井下观测和分析巷道围岩稳定性,提高了巷道围岩稳定性分析的安全性和准确性。
80.优选地,地质雷达采用现场成像的方式,能够对巷道内部结构进行现场分析,辨识巷道围岩稳定性,地质雷达检测单元40探测深度可以达到6m-8m,能够满足掘进工作面初期对巷道质量和危险源的评价。
81.作为本发明的具体实施例,实时采集工作面的有害气体浓度指标数据包括:实时采集工作面粉尘浓度、co气体浓度、so2气体浓度、o2气体浓度和co2气体浓度数据。掘进工作面爆破作业后,巷道内粉尘浓度高、有害气体类型较多,通过机器人搭载环境气体检测装
置采集工作面的有害气体浓度指标数据,能够有效避免人工检测方式给安全员带来的健康影响。
82.作为本发明的具体实施例,巷道全景扫描数据的采集方法为:移动测量机器人对已施工巷道进行三维激光扫描,获取巷道全景扫描数据。
83.步骤s3,根据巷道全景扫描数据,生成巷道三维实体模型。
84.如图3所示,步骤s3中包括如下子步骤:
85.步骤s310,对多组巷道全景扫描数据进行预处理。
86.其中,每一组巷道全景扫描数据是对巷道尺寸的精确描述。预处理包括抽稀、降噪、剪切和平剖等处理。抽稀处理是通过减少点的数量(例如删除每n个点)来减少点云体量的一种方法。这样做是为了加快大规模数据的处理时间。剪切和平剖也是切减少点云大小的方法。降噪是为了降低干扰,减少干扰数据。
87.步骤s320,将预处理后的数据统一配准整合在一起,得到地下矿山整体空间三维数据。
88.步骤s330,在地下矿山整体空间三维数据的基础上,对巷道的点云进行建模,自动生成巷道模型。
89.具体的,采用点云建模技术,对巷道的点云进行建模,自动生成巷道模型。其中,将多次扫描得到的点云数据,分别生成一个巷道模型。
90.可以理解的是,点云是通过激光发射器接收的信号进行处理所获得的表达巷道三维形态的、离散的、密度不均匀的数据点集,能够以较高的精度反映巷道的真实情况,如巷道内物体反射特征、大小、高矮,物体之间的相对距离关系等。
91.步骤s340,对生成的巷道模型进行拼接,形成井下巷道模型的更新和延伸趋势,进而获得巷道三维实体模型。
92.具体的,利用点云拼接方法将生成的多个巷道模型进行拼接合成一个整体,形成巷道三维实体模型。
93.作为本发明的具体实施例,将巷道内布置的重大设备模型及运行数据相结合,实现矿山井下生产情况的数字孪生,为矿山智能化建设提供模型基础和数据依据。
94.如图5所示,为巷道三维实体模型构建所提供的硬件系统和软件系统。
95.具体的,硬件系统包括:激光扫描仪、组合导航系统和控制系统安装在一起,以实现一体化机械设计;并集成煤安防爆装置和无线充电装备,然后对系统进行标定与校验(包括多传感器时间同步标定、外方位传感器标定和一体化集成系统的校验)。软件系统包括:惯性导航系统、条形标码(即立体条码标靶)和控制系统对移动测量设备进行定位定姿(获取位置与姿态信息);采集显控系统;构建标码控制网后进行空间时间整合、姿态位置解算、多源数据融合;空间时间整合后进行点云数据解析与融合和点云数据管理与分析;姿态位置解算后进行点云数据显示与编辑;多源数据融合后进行点云数据滤波与导出。
96.作为本发明的具体实施例,对于重点部分,利用裁剪盒工具提取目标(例如重点观察区域、异常区域等)所在位置。对多期的掘进工作面巷道数据进行对比,分析巷道的形变,可精准定潜在的安全隐患,协助矿山相关部门做出判断,进行支护方面的处置有效避免相关灾害的发生。
97.本发明利用slam扫描进行的三维重建和地图构建能够对巷道测量和gis应用提供
精准的数据支撑,相较于传统的巷道测量,slam扫描具有以下特点:
98.1、减小安全员现场测量的工作强度,缩短数据处理成图的时间;
99.2、扫描数据能清晰的反映现场,一目了然,可以根据现场情况更合理的布设生产的重大设备等;
100.3、平面位置和高程位置精度能够达到厘米级;
101.4、在爆破初期进入安全隐患不明确的区域,有效规避安全风险。
102.5、数据获取速度快,机器人自主完成,自动构图,快速构建巷道三维模型。
103.步骤s4,将采集的巷道围岩数据、工作面的有害气体浓度指标数据和巷道三维实体模型通过网络上传至管理平台。
104.步骤s5,管理平台对上传的数据进行分析处理,获取煤矿井下安全评价结果。
105.如图2所示,应用于管理平台,管理平台获取煤矿井下安全评价结果的方法包括对巷道内部岩体的异常结构进行判别,管理平台对巷道内部岩体的异常结构进行判别的方法包括如下步骤:
106.步骤t1,获取掘进工作面爆破作业后巷道的第一扫描数据,并根据第一扫描数据,确定巷道岩体内部的异常区域。
107.具体的,在掘进工作面巷道中,沿巷道开拓方向进行地质雷达扫描,获取巷道地质体内部数据,即获得第一扫描数据,根据巷道地质体内部数据确定巷道岩体内部的异常区域。
108.步骤t2,获取异常区域内不同水平面的第二扫描数据,得到巷道岩体内部异常区域的水平测量数据(水平方向剖视图)。
109.具体的,对异常区域进的不同水平面分别进行地质雷达扫描,进而获取异常区域内不同水平面的第二扫描数据(也就是巷道地质体内部数据),得到巷道岩体内部异常区域的水平剖视图。
110.步骤t3,获取异常区域内不同垂直面的第三扫描数据,得到巷道岩体内部异常区域的垂直测量数据(垂直方向剖视图)。
111.具体的,对异常区域不同垂直面进行地质雷达扫描,获取异常区域内不同垂直面的第三扫描数据(也就是巷道地质体内部数据),得到巷道岩体内部异常区域的垂直测量数据。
112.步骤t4,将异常区域的水平测量数据和垂直测量数据拟合至巷道三维激光扫描数据中,对巷道内部岩体的异常结构进行判别。
113.其中,巷道三维激光扫描数据的获取方法为:在掘进工作面巷道中,沿巷道开拓方向进行slam扫描,获取巷道空间数据,即为巷道三维激光扫描数据。
114.可以理解的是,通过以上一系列扫描,可在现场快速确定岩体内部异常空间区域的测量数据和异常区域的详细信息(例如位置信息、面积大小等)。将所得数据图拟合至巷道三维激光扫描数据中,对巷道内部岩体的异常结构进行判断和识别,进而实现对巷道爆破质量的评价。
115.管理平台还执行如下评价方法:
116.管理平台,根据巷道三维实体模型和设计施工图进行对比,获得巷道施工质量评价结果。其中,测量并获取巷道三维实体模型和设计施工图的质量评价指标的差值,判断该
差值是否在合格阈值范围内,若是,则表示巷道施工质量合格,否则,不合格。质量评价指标可以是长度、宽度、深度或缺陷等。可以理解的是,巷道三维实体模型用于与设计施工图进行对比,对巷道施工质量完成情况进行评估,进而完成巷道施工质量验收工作;同时对比多个时间段巷道三维实体模型的变化情况,辅助分析巷道围岩稳定性。
117.管理平台,根据巷道围岩数据,辨识巷道围岩稳定性。其中,巷道围岩数据包括地质体内部数据。
118.实施例三
119.如图4所示,本技术提供一种煤矿井下安全评价系统,该系统包括:
120.煤矿井下移动测量机器人100,以及管理平台200;
121.煤矿井下移动测量机器人100采集巷道内的安全评价数据,并将采集的安全评价数据上传至管理平台200;
122.管理平台200对煤矿井下移动测量机器人100采集的数据进行分析处理,获取煤矿井下安全评价结果。
123.本技术实现的有益效果如下:
124.(1)本技术面向掘进工作面爆破作业后的巷道环境,基于履带式移动平台设计的可伸缩支撑机构,搭载slam激光扫描、环境气体探测、地质雷达监测单元,实现感知设备的自主移动测量;
125.(2)本技术机器人通过搭载地质雷达对掘进工作面前端进行扫描,能够辨识顶板围岩稳定性。
126.(3)本技术通过井下巷道全景扫描后,对采集的扫描数据进行处理分析,生成井下巷道三维实体模型,利用巷道三维实体模型与设计施工图进行对比,完成巷道施工质量验收工作。通过对比多个时间段的实体模型变化情况,辅助分析巷道围岩稳定性。
127.(4)本技术通过机器人的自主巡检,实现了掘进工作面爆破初期巷道安全及质量的快速评价,减少了危险环境下的作业人员,提高了掘进工作面的智能化水平。
128.以上所述仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理内所做的任何修改、等同替换、改进等,均应包括在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1