空中RTK悬停对地目标激光测量装置及方法与流程
空中rtk悬停对地目标激光测量装置及方法
技术领域
1.本发明涉及工程施工技术领域,尤其是涉及一种空中rtk悬停对地目标激光测量装置及方法。
背景技术:
2.在基坑开挖施工中涉及到较多的特征点测量放样,若采用gps-rtk法放样,仪器存在信号连接不畅通,往往是浮点解,长时间无法固定或者无信号,导致无法进行有效固定解放样。而使用全站仪常规测量方法受地理环境和施工影响,一般仪器都需架设在基坑临边,仪器稳定性较差,容易发生较大偏差,往往需要进行多次设站才能完成本次的测量任务。同时测量过程中缺少检核条件、测量精度较差、基准传递数据难以溯源。同时由于环境因素的客观存在,无人机在飞行的过程中对于横摆侧向风的修正能力有限,当风力超过修正的阈值时,则会导致激光发射器的标记位置会和实际位置偏差很大。中国专利文献cn 114136292 a记载了一种适用土方工程的无人机放样方法及系统,该方法在使用的过程中,并不能很好的客服环境因素的影响,导致精度保持性较差,使用存在缺陷,需要改进。
技术实现要素:
3.本发明提供了一种空中rtk悬停对地目标激光测量装置及方法,解决了基坑放样操作麻烦、精度较差、施工安全性不高、不能克服环境因素的影响进行准确快速放样的问题。
4.为解决上述技术问题,本发明所采用的技术方案是:一种空中rtk悬停对地目标激光测量装置及方法,包括设置在无人机上的rtk,无人机包括载体,载体的顶部设有rtk,载体的底部设有自适应单元,自适应单元的底部铰接有伸缩单元,伸缩单元的下侧设有配重单元,配重单元的底部设有激光发射器。
5.优选的方案中,载体的上部设有多个第二安装孔,第二安装孔通过螺钉连接有连接单元,连接单元包括底座,底座上设有多个第一通孔,螺钉穿设在第一通孔内,底座的上部设有筒体,rtk通过支撑柱和筒体连接。
6.优选的方案中,筒体内部设有第二螺纹,支撑柱的上部和rtk连接,支撑柱的下部和第二螺纹螺纹连接。
7.优选的方案中,底座的上侧螺纹连接有调整座,支撑柱的底部设有限位块,限位块可拆卸的设置在调整座内侧,限位块下侧设有弹簧,弹簧位于筒体内,筒体外部设有第一螺纹,调整座内部设有第三螺纹,第三螺纹和第一螺纹螺纹连接,限位块的上部设有连接柱,连接柱和支撑柱的底部螺纹连接,调整座的上部设有盖板,盖板的中间设有通槽和卡槽,通槽和卡槽的长度小于第三螺纹的直径。
8.优选的方案中,载体的底部设有多个第一安装孔,自适应单元包括固定座,固定座通过螺钉和载体连接,固定座的上部设有凸台,凸台内设有第一半球面,凸台和固定座之间设有阶台,凸台外侧螺纹连接有连接座,连接座内设有第二半球面,第一半球面和第二半球
面形成球形密闭空间,球头贴合在球形密闭空间内,球头的底部设有转接盘,转接盘通过螺钉和伸缩单元连接。
9.优选的方案中,固定座外侧设有多个耳板,耳板上设有第二通孔,耳板通过螺钉个载体连接,凸台的外侧设有第四螺纹,连接座包括直伸部和圆弧部,直伸部的内侧设有第五螺纹,第五螺纹和第四螺纹螺纹连接,第二半球面位于圆弧部内,圆弧部底部贯穿设有第四通孔,转接盘上设有支柱,支柱上设有第六螺纹,球头底部设有第三安装孔,第六螺纹和第三安装孔螺纹连接,固定座的底部还设有多个圆环槽。
10.优选的方案中,转接盘上设有多个第三通孔,伸缩单元包括支撑座,支撑座的底部设有安装盘,安装盘上设有第五通孔,螺钉穿设在第三通孔和第五通孔内,支撑座的两侧分别设有电机和平衡块,电机和平衡块之间设有伸缩部,伸缩部内设有顶杆,顶杆通过挂钩和配重单元连接。
11.优选的方案中,顶杆的下侧设有第六通孔,顶杆的底部设有第五安装孔,挂钩包括c型杆,c型杆的一侧穿设在第六通孔内,c型杆的另一侧设有挂板,挂板上设有第八通孔,配重单元包括配重块,配重块上平行设有两个立柱,两个立柱之间通过平行设置的夹持板连接,两个夹持板的距离和挂板的厚度相匹配,夹持板上设有第七通孔,第七通孔的直径和第八通孔直径相等,夹持板内穿设有锁钉,锁钉和第五安装孔螺纹连接;配重块的上部设有多个调整孔,调整孔内可拆卸的设有增重杆,配重块的底部设有第六安装孔,激光发射器和第六安装孔螺纹连接。
12.一种空中rtk悬停对地目标激光测量的方法,包括以下步骤:s1、根据设计图纸对无人机进行第一安装孔和第二安装孔的改装;s2、通过天气数据和风向仪获取基坑附近的风的相关参数;s3、当风力强度小于无人机的横摆侧倾的修正阈值时,在无人机的上部安装rtk,在无人机的下部直接安装激光发射器;s4、当风力强度大于无人机的横摆侧倾的修正阈值时,在无人机的上部安装rtk,在无人机的下部分别通过自适应单元、伸缩单元、配重单元和挂钩进行转接,然后在配重单元的底部安装激光发射器;s5、将改装后的无人机通过手持控制飞至基坑上方,当到达设计位置时,打开激光发射器对基坑底部进行标记;s6、根据基坑的类型进行相应的放样点的调整,直至完成所有点的放样标记。
13.优选的方案中,在s5中,通过手持实时观察无人机的位置是否和采样的数据相同,直至微调至误差范围内,当风力强度大于无人机的横摆侧倾的修正阈值时,通过打开伸缩单元的顶杆,从而将整体的重心降低,在保证rtk的信号良好的情况下,同时稍微降低无人机的飞行高度,然后进行后续的工序。
14.本发明的有益效果为:本发明主要在建(构)筑物深大基坑施工过程中,从提高工作效率、保障测量放样精度、规避人员安全风险等方面入手,充分利用rtk惯导测量的有效补偿,配合激光发射器的激光指示引导,直接对地面目标特征点进行放样,有效减少测量人员、设备的大量投入,达到测量控制的高效性、实时性、便捷性和准确性。本发明对无人机的改动非常小,避免了对无人机的结构造成破坏从而影响无人机性能的问题,在面对较强的风力时,由于伸缩单元底部设置有配重单元,从而能在一定范围内保持稳定状态,此时位于
伸缩单元上部的自适应单元能对无人机进行拉持,同时调整伸缩杆的顶杆长度,将整体装置的重心进一步降低,辅助无人机进行修正,增重杆起到调整配重的作用,修正后的rtk处于补偿范围内时,打开激光发射器,对基坑的底部进行放样标记,从而为后续的施工提供指导,具有良好的经济效益。
附图说明
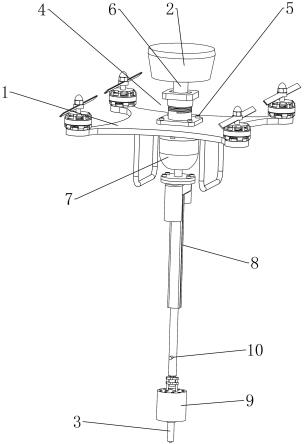
15.下面结合附图和实施例对本发明作进一步说明:图1是本发明的结构示意图状态一;图2是图1的正视示意图;图3是图1的右视示意图图;图4是本发明的无人机安装rtk爆炸结构示意图状态一;图5是本发明的无人机安装rtk爆炸结构示意图状态二;图6是本发明的底座结构示意图;图7是本发明的调整座结构示意图;图8是本发明的无人机安装激光发射器爆炸结构示意图状态一;图9是本发明的无人机安装激光发射器爆炸结构示意图状态二;图10是本发明的配重单元结构示意图;图11是本发明的结构示意图状态二;图12是本发明的结构示意图状态三;图13是本发明的结构示意图状态四。
16.图中:无人机1;载体101;第一安装孔102;第二安装孔103;rtk2;激光发射器3;连接单元4;底座401;调整座402;第一通孔403;第一螺纹404;第二螺纹405;弹簧406;限位块407;连接柱408;盖板409;第三螺纹410;通槽411;卡槽412;筒体413;螺钉5;支撑柱6;自适应单元7;固定座701;凸台702;第一半球面703;第四螺纹704;耳板705;第二通孔706;阶台707;球头708;第三安装孔709;连接座710;直伸部711;圆弧部712;第五螺纹713;第二半球面714;转接盘715;支柱716;第六螺纹717;圆环槽718;第三通孔719;第四通孔720;伸缩单元8;支撑座801;电机802;平衡块803;安装盘804;伸缩部805;顶杆806;第五通孔807;第五安装孔808;第六通孔809;配重单元9;配重块901;立柱902;夹持板903;第七通孔904;调整孔905;第六安装孔906;挂钩10;c型杆1001;挂板1002;第八通孔1003;锁钉11;增重杆12。
具体实施方式
17.如图1-13中,一种空中rtk悬停对地目标激光测量装置,包括设置在无人机1上的rtk2,无人机1包括载体101,载体101的顶部设有rtk2,载体101的底部设有自适应单元7,自适应单元7的底部铰接有伸缩单元8,伸缩单元8的下侧设有配重单元9,配重单元9的底部设有激光发射器3。由此结构,以使得用无人机1作为飞行平台,能实现空中悬停稳定的技术特点,从而控制手持器将rtk2和激光发射器3带入设计坐标点完成放样,rtk2计算出设计点的搜索求解,当无人机1飞行至设计点上方时,施工人员操作无人机1处于悬停状态,此时激光发射器3正对基坑,完成放样点的标记,从而利于施工人员精准高效的对基坑进行作业,自适应单元7借助底部的伸缩单元8连接有配重单元9,从而能承受横摆侧向风的影响,保持自
身垂直地面的能力,在面对较强的风力时,自适应单元7能对无人机1进行辅助修正,由于伸缩单元8和配种单元9为刚性连接,通过伸缩单元8改变装置整体的重心,保证整体结构的稳定。
18.优选的方案中,载体101的上部设有多个第二安装孔103,第二安装孔103通过螺钉5连接有连接单元4,连接单元4包括底座401,底座401上设有多个第一通孔403,螺钉5穿设在第一通孔403内,底座401的上部设有筒体413,rtk2通过支撑柱6和筒体413连接。由此结构,以使得rtk2可以方便的和底座401连接,只需要通过在无人机1的基体上进行设置螺纹孔的方式即可完成rtk2和激光发射器3的安装,避免了对无人机1的改动过大造成影响无人机整体性能和飞行效果的问题,底座401可以根据需要进行更换和调整,从而使用更便捷。
19.优选的方案中,筒体413内部设有第二螺纹405,支撑柱6的上部和rtk2连接,支撑柱6的下部和第二螺纹405螺纹连接。支撑柱6的外侧设置有螺纹,由此结构,以使得支撑柱6可以方便的安装到rtk2上,然后将rtk2固定在筒体413内,操作简单,且整体的稳定性更好。
20.优选的方案中,底座401的上侧螺纹连接有调整座402,支撑柱6的底部设有限位块407,限位块407可拆卸的设置在调整座402内侧,限位块407下侧设有弹簧406,弹簧406位于筒体413内,筒体413外部设有第一螺纹404,调整座402内部设有第三螺纹410,第三螺纹410和第一螺纹404螺纹连接,限位块407的上部设有连接柱408,连接柱408和支撑柱6的底部螺纹连接,调整座402的上部设有盖板409,盖板409的中间设有通槽411和卡槽412,通槽411和卡槽412的长度小于第三螺纹410的直径。由此结构,以使得可以通过改变调整座402相对底座401的位置,从而改变弹簧406的压缩状态,也即改变了弹簧406的支撑力的大小,从而能将限位块407更稳定的顶在调整座402的内侧,保证了支撑柱6的位置的稳定,从而能为rtk2提供更好的工作环境;调整座402和筒体413的安拆方便,可以根据使用的需要快速的改变调整座402的位置,同时限位块407和支撑柱6的连接方便且整体刚性好,结构稳定,连接柱408起到了承上启下的作用。通槽411和卡槽412垂直设置,卡槽412的深度小于通槽411,从通槽411内将限位块407插入到调整座402内后,继续向下压缩弹簧406然后转动限位块407,让限位块407卡入到卡槽412内,最后弹簧406给予限位块407稳定牢固的支撑,从而将rtk2的状态保持。
21.优选的方案中,载体101的底部设有多个第一安装孔102,自适应单元7包括固定座701,固定座701通过螺钉5和载体101连接,固定座701的上部设有凸台702,凸台702内设有第一半球面703,凸台702和固定座701之间设有阶台707,凸台702外侧螺纹连接有连接座710,连接座710内设有第二半球面714,第一半球面703和第二半球面714形成球形密闭空间,球头708贴合在球形密闭空间内,球头708的底部设有转接盘715,转接盘715通过螺钉5和伸缩单元8连接。由此结构,以使得当风力强度大于无人机1的修正能力时,在无人机1的底部安装自适应单元7,由于球头708和固定座701以及连接座710之间形成球铰结构,伸缩单元8底部的配重单元9保证了伸缩单元8的状态垂直地面,无人机1受风力的吹动倾斜,球头708在固定座701内转动,保证了整体的稳定,也即当无人机1受风力吹动时,伸缩单元8能够保持垂直地面的状态,从而为激光发射器3提供准确标记的基础和环境。
22.优选的方案中,固定座701外侧设有多个耳板705,耳板705上设有第二通孔706,耳板705通过螺钉5个载体101连接,凸台702的外侧设有第四螺纹704,连接座710包括直伸部711和圆弧部712,直伸部711的内侧设有第五螺纹713,第五螺纹713和第四螺纹704螺纹连
接,第二半球面714位于圆弧部712内,圆弧部712底部贯穿设有第四通孔720,转接盘715上设有支柱716,支柱716上设有第六螺纹717,球头708底部设有第三安装孔709,第六螺纹717和第三安装孔709螺纹连接,固定座701的底部还设有多个圆环槽718。第四通孔720的直径满足当支柱716贴合在通孔720的内侧时,支柱716的轴线和第四通孔轴线的夹角(锐角)不大于无人机1的惯导修正的倾斜角度,由此结构,以使得固定座701和连接座710的安拆方便,同时转接盘715上的支柱716对球头708进行拉持,保证了球头708对固定座701和连接座710形成稳定约束和限位,圆环槽718则避免了由于无人机1表面存在曲率的变化,减少固定座701和无人机1的接触面积,整体连接刚性更好,无人机1当面对横摆风时,由于第四通孔720的限制,同时配种单元9的拉持,能辅助修正无人机的倾斜角度,减缓倾斜的程度,从而保证rtk在补偿的倾斜角度范围内高效稳定工作。
23.优选的方案中,转接盘715上设有多个第三通孔719,伸缩单元8包括支撑座801,支撑座801的底部设有安装盘804,安装盘804上设有第五通孔807,螺钉5穿设在第三通孔719和第五通孔807内,支撑座801的两侧分别设有电机802和平衡块803,电机802和平衡块803之间设有伸缩部805,伸缩部805内设有顶杆806,顶杆806通过挂钩10和配重单元9连接。由此结构,以使得借助平衡块803,伸缩单元8的支撑座801两侧的重量相等,能保持更好的平衡状态,顶杆806的伸缩动作改变了配重单元9的位置,从而改变整体的重心,无人机 的飞行状态更稳。
24.优选的方案中,顶杆806的下侧设有第六通孔809,顶杆806的底部设有第五安装孔808,挂钩10包括c型杆1001,c型杆1001的一侧穿设在第六通孔809内,c型杆1001的另一侧设有挂板1002,挂板1002上设有第八通孔1003,配重单元9包括配重块901,配重块901上平行设有两个立柱902,两个立柱902之间通过平行设置的夹持板903连接,两个夹持板903的距离和挂板1002的厚度相匹配,夹持板903上设有第七通孔904,第七通孔904的直径和第八通孔1003直径相等,夹持板903内穿设有锁钉11,锁钉11和第五安装孔808螺纹连接;配重块901的上部设有多个调整孔905,调整孔905内可拆卸的设有增重杆12,配重块901的底部设有第六安装孔906,激光发射器3和第六安装孔906螺纹连接。由此结构,以使得挂钩10能为配重单元9提供更好的拉力,同时均布载荷,受力更稳定,且保证了配重单元9拆下后再安装时位置的准确。
25.一种空中rtk悬停对地目标激光测量的方法,包括以下步骤:s1、根据设计图纸对无人机1进行第一安装孔102和第二安装孔103的改装;s2、通过天气数据和风向仪获取基坑附近的风的相关参数;s3、当风力强度小于无人机1的横摆侧倾的修正阈值时,在无人机1的上部安装rtk2,在无人机1的下部直接安装激光发射器3;s4、当风力强度大于无人机1的横摆侧倾的修正阈值时,在无人机1的上部安装rtk2,在无人机1的下部分别通过自适应单元7、伸缩单元8、配重单元9和挂钩10进行转接,然后在配重单元9的底部安装激光发射器3;s5、将改装后的无人机1通过手持控制飞至基坑上方,当到达设计位置时,打开激光发射器3对基坑底部进行标记;s6、根据基坑的类型进行相应的放样点的调整,直至完成所有点的放样标记。
26.由此结构,以使得测量人员无需攀爬到基坑底部进行司镜,利用激光发射器的激
光引导即可对目标具体位置示意,按照示意的位置进行标注即可,安全方面有保障;在进行深大基坑结构物特征点放样时,无人机飞行高度距离站立地面一般为1-2m,应对环境变化的能力更好,对于不同深度的基坑特征点进行放样时,可以实时调整激光发射器的激光斑点直径大小,以确保已放样点位标识清晰、范围最小。
27.优选的方案中,在s5中,通过手持实时观察无人机1的位置是否和采样的数据相同,直至微调至误差范围内,当风力强度大于无人机1的横摆侧倾的修正阈值时,通过打开伸缩单元8的顶杆806,从而将整体的重心降低,在保证rtk2的信号良好的情况下,同时稍微降低无人机1的飞行高度,然后进行后续的工序。由此结构,以使得能有效解决了深大基坑gps-rtk点位放样信号稳定性差,全站仪放样定位过程中遮挡、盲区等重复设站问题,弥补了效率较低、重复设站误差等方面不足,且面对风力强度较大时,无法进行施工放样,保证效率和精度的问题,本装置可做到按需施测、高效快捷。
28.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1