一种阵列干涉合成孔径雷达三维点云配准方法与流程
1.本专利涉及一种阵列干涉sar(synthetic aperture radar)数据处理与应用,尤其是涉及一种基于强点目标的阵列干涉合成孔径雷达三维点云配准方法。
背景技术:
2.相比合成孔径雷达二维成像技术,合成孔径雷达三维成像技术能够消除由雷达侧视成像方式导致的目标叠掩现象,显著提升目标分辨识别能力,是sar技术发展的重要方向之一。中科院提出的阵列干涉sar技术利用跨航向的阵列天线进行侧视成像,在获得的多角度观测数据基础上,实现复杂场景的三维重建,获得区域三维点云。由于受到轨道误差等因素影响,不同航带获得的阵列insar点云之间可能存在一定的位移、旋转,影响点云的进一步应用。
3.为了将点云统一到同一个坐标系统下,需要对不同的点云进行配准处理。常用的点云配准方法主要包括:(1)icp(iterative closest point)算法,通过查找就近点迭代求解点云之间的转换关系;(2)基于特征点的全局最优配准方法,常用的特征点提取算法包括narf(normal aligned radial feature)算法、iss(intrinsic shape signatures)算法等,提取的点云特征点一般为点云中的角点、顶点等,常用点云特征描述子包括fpfh(fast point feature histogram)算法、shot(signature of histograms of orientations)算法、spin image算法等,这类特征描述子基于点云分布的几何特征对特征点进行匹配。此外还有转为频率域的点云配准算法等。这类算法在通过激光雷达、深度相机获得的点云中取得了不错的应用效果。与其他点云获取方式不同,阵列insar技术不能直接获得探测目标表面的点云回波,其点云获取方式主要是通过对sar影像配准后重解算得到。另外由于sar是相干成像的方式,阵列insar点云杂波点较多。因此,阵列insar点云具有非表面分布、杂波点较多的特点,导致传统点云配准算法应用效果差,配准后两个点云之间仍然存在一定的位移、旋转。
技术实现要素:
4.本发明提供了一种阵列干涉合成孔径雷达三维点云配准方法,是一种基于强点目标的点云配准方法,目的在于解决现有点云配准技术无法应用于阵列insar点云的难题,该方法充分利用阵列insar点云的强度信息,通过强点目标提取、构建强度特征描述子实现点云之间的配准。该方法能够有效解决阵列insar点云配准难的问题,有效提高点云的相对几何精度。
5.一种阵列干涉合成孔径雷达三维点云配准方法,通过提取强点目标,构建强度特征描述子并匹配后,计算点云之间的转换关系,实现不同航带点云之间的配准,包括以下步骤:
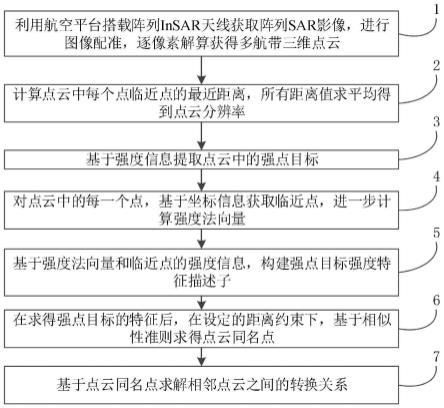
6.s1:利用航空平台搭载阵列insar天线获取阵列sar影像,进行图像配准,逐像素解算获得多航带三维点云;
7.s2:选择相邻的阵列干涉sar点云作为待处理点云,计算点云中每个点的最临近点的距离,所有距离值求平均得到点云分辨率;
8.s3:基于强度信息提取点云中的强点目标;
9.s4:对点云中的每一个点,基于坐标信息获取临近点,进一步计算强度法向量;
10.s5:基于强度法向量和临近点的强度信息,构建强点目标强度的特征描述子;
11.s6:在求得强点目标的特征后,在设定的距离约束下,基于相似性准则求得点云同名点;
12.s7:基于点云同名点求解相邻点云之间的转换关系。
13.进一步的,步骤s3中,将强点目标作为点云配准的点云特征点,设定(xi,yi,zi,ii)、(xj,yj,zj,ij)分别表示获取的两个阵列干涉insar点云p,q,其中(x,y,z)、(i)分别表示点云的坐标和强度,i=[1
ꢀ…ꢀ
m],j=[1
ꢀ…ꢀ
n],m和n分别表示p,q中点的数量,所述强点目标的提取方式表示为:
[0014]
i》i0ꢀꢀꢀ
(1)
[0015]
其中,i0表示提取强点目标的强度阈值。
[0016]
进一步的,步骤s4中,对强点目标p,以分辨率d的倍数作为半径值,选择某一个半径范围内的点作为临近点点集p',强度梯度向量通过以下公式计算:
[0017][0018]
其中p'表示邻域内的点,p'∈p',n表示邻域中点的个数。
[0019]
进一步的,步骤s5中,构建了基于强度梯度的强度特征描述子,对每个点,选择设定距离范围内的点作为邻域点,由式(2)计算得到的强度法向量用法向量用表示,将强度法向量由笛卡尔坐标数组转换为球面坐标:
[0020][0021][0022][0023]
其中,az,el,r分别表示方位角、仰角、半径长度;
[0024]
在将邻域点的强度向量转为球面坐标系后,将点散射体与临近点的距离等分,统计每个区间内梯度向量r的均值,得到强度梯度直方图f,作为点散射体的特征描述子。
[0025]
进一步的,步骤s6中,以平方和测度得到了点云同名点,选择特征向量平方和测度最小值得点作为同名点:
[0026]
argmin||f
p1-f
p2
||
ꢀꢀꢀ
(6)
[0027]
其中,f表示特征向量,p1,p2表示不同点云中的强点目标;基于同名点,通过随机抽样一致算法能够建立不同点云之间的坐标转换关系。
[0028]
进一步的,步骤s7中,所述随机抽样一致算法建立不同点云之间的坐标转换关系如下:
[0029][0030]
其中,t表示平移参数,s表示尺度参数,r表示旋转矩阵。
[0031]
本发明提供的基于强点目标的阵列干涉合成孔径雷达三维点云配准方法,能够解决阵列干涉sar点云的配准问题。考虑到层析sar技术会受到sar技术本身特点的影响,与阵列干涉sar技术特点具有相似之处,本文提出的基于点散射体配准思路同样适用于解决层析sar点云的配准问题。本发明基于强点目标而不是特征点进行点云配准,有效避免了由于阵列干涉sar点云非表面分布导致的无法提取特征点的问题。本发明基于强度梯度构建了强点目标的特征描述子,能够有效表达强点目标的特征,获得不同点云中的同名点。本发明有效提高了阵列干涉sar点云之间的几何精度,能够进一步促进阵列干涉sar技术在测绘中的应用。
附图说明
[0032]
下面结合附图对本发明进行进一步详细的描述,以使得本发明的上述优点更加明确。
[0033]
图1是本发明所述的阵列干涉合成孔径雷达三维点云配准方法的流程图;
[0034]
图2是基于阵列干涉sar技术获得点云分布与lidar点云对比图;
[0035]
图3是笛卡尔坐标系与球面坐标系转换关系图;
[0036]
图4a和图4b分别是应用本发明后的效果对比图,图4a为配准前点云图,图4b为经过本发明算法配准后结果。
具体实施方式
[0037]
下面结合附图对本发明作进一步详细的描述,本发明通过提取强点目标,构建强度特征描述子并匹配后,计算点云之间的转换关系,实现不同航带点云之间的配准,整个处理流程如图1所示:
[0038]
步骤s1,利用航空平台搭载阵列干涉sar天线获取阵列sar影像,进行图像配准,逐像素解算获得多航带三维点云。
[0039]
步骤s2,选择相邻的阵列干涉sar点云作为待处理点云,对于点云中的每个点,计算最临近点的距离,将所有点的最邻近距离求平均,得到点云的分辨率d。
[0040]
步骤s3,基于强度信息提取点云中的强点目标:对每个点云,选择强点目标作为点云特征点。阵列干涉sar点云非表面分布的特点如图2所示,基于几何特征的传统特征点匹配算法利用的是点云表面的特征点,传统算法无法适用于阵列干涉sar点云。本发明利用强度信息提取点云强点目标,选择强度大于某一个阈值的点作为强点目标。
[0041]
假设(xi,yi,zi,ii)、(xj,yj,zj,ij)分别表示获取的两个阵列干涉sar点云p,q,其中(x,y,z)、(i)分别表示点云的坐标和强度,i=[1
ꢀ…ꢀ
m],j=[1
ꢀ…ꢀ
n],m和n分别表示p,q中点的数量。那么步骤(3)中强点目标的提取方式可以表示为
[0042]
i》i0ꢀꢀꢀ
(1)
[0043]
其中,i0表示提取强点目标的强度阈值。
[0044]
步骤s4,对点云中的每一个点,基于坐标信息获取临近点,进一步计算强度法向量:对强点目标p,以分辨率d的倍数作为半径值,选择某一个半径范围内的点作为临近点点集p',强度梯度向量进一步可以通过式2计算:
[0045][0046]
其中p'表示邻域内的点,p'∈p',(x
p
,y
p
,z
p
)表示强点目标的坐标,(x
p'
,y
p'
,z
p'
)表示邻域内点的坐标,n表示邻域中点的个数。
[0047]
对每个点,选择一定距离范围内的点作为邻域点。由式2计算得到的强度法向量用表示,将强度法向量由笛卡尔坐标数组转换为球面坐标,笛卡尔坐标系和球面坐标的转换关系如图3示。其中,方位角az的值域是[-180,180],仰角el的值域是[-90,90]。笛卡尔坐标数组与球面坐标的转换关系如下:
[0048][0049][0050][0051]
其中,az,el,r分别表示方位角、仰角、半径长度。
[0052]
步骤s5,在将邻域点的强度向量转为球面坐标系后,将点散射体与临近点的距离等分,统计每个区间内梯度向量r的均值,得到强度梯度直方图f,作为点散射体的特征描述子。
[0053]
步骤s6,在求得强点目标的特征后,在设定的距离约束下,基于相似性准则求得同名点;
[0054]
选择特征向量平方和测度最小值得点作为同名点:
[0055]
argmin||f
p1-f
p2
||
ꢀꢀꢀ
(6)
[0056]
其中,f表示特征向量,p1,p2表示不同点云中的强点目标。
[0057]
步骤s7,基于点云同名点求解相邻点云之间的转换关系:以特征向量平方和作为测度得到同名点。进一步,基于同名点,通过随机抽样一致算法即可建立不同点云之间的坐标转换关系。
[0058][0059]
其中,t表示平移参数,s表示尺度参数,r表示旋转矩阵。
[0060]
所述方法适用于解决阵列干涉sar三维点云配准难的问题,提高不同航带获得的阵列干涉sar点云之间的相对几何精度,有利于阵列干涉sar技术的测绘应用。
[0061]
本发明所述的基于强点目标的三维点云配准方法,有效避免了由于阵列insar点云非表面分布导致的无法提取特征点的问题。本发明基于强度梯度构建了强点目标的特征描述子,能够有效表达强点目标的特征,获得不同点云中的同名点。本发明有效提高了阵列
干涉sar点云之间的几何精度,能够进一步促进阵列insar技术在测绘中的应用。本发明所述的基于强点目标的三维点云配准方法能够适用于阵列干涉sar、层析sar技术生成的点云。
[0062]
应用本发明进行阵列insar点云配准实验,实验结果如图4所示。其中,上图为配准前点云之间关系图,下图为应用本发明算法后点云关系示意图。从图中黑色圆圈标记的区域可以看到,应用本发明后,点云的相对精度得到了很大提升。
[0063]
上述具体实施例仅仅是示例性的,在本发明的上述教导下,本领域技术人员可以在上述实施例的基础上进行各种改进和变形,而这些改进或者变形落在本发明的保护范围内。本领域技术人员应该明白,上面的具体描述只是为了解释本发明的目的,并非用于限制本发明。本发明的保护范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1