一种惯导系统的四棱台式台体陀螺安装面精度测试方法与流程
1.本发明属于惯性导航系统技术领域,特别涉及一种惯导系统的四棱台式台体陀螺安装面精度测试方法。
背景技术:
2.谐振惯导系统是以谐振陀螺为核心敏感元件,结合加速度计组件组成的新型捷联式惯性导航系统。基于谐振陀螺的原理特性,谐振惯导采用四陀螺圆锥配置结构,该配置方案通过“3+1”方式增加一支冗余陀螺,一方面可提高系统工作可靠性,另一方面有利于实现系统自校准技术应用。采用四棱台式台体安装谐振陀螺,根据陀螺估计误差协方差最优准则,每个陀螺安装面相对于台体加速度计组件安装面的夹角均为α,此陀螺排布方案有利于陀螺间误差最佳解耦角度,保证系统最佳工作状态。
3.为了保证四陀螺安装后形成的惯性坐标系的正交性,需要对惯导系统的四棱台式台体陀螺安装面进行测试,现有技术中未公开相关的测量手段。
技术实现要素:
4.本发明的目的是在于克服现有技术的不足之处,提供一种惯导系统的四棱台式台体陀螺安装面精度测试方法。
5.本发明的上述目的通过如下技术方案来实现:一种惯导系统的四棱台式台体陀螺安装面精度测试方法,其特征在于,包括如下步骤:步骤1、选择测量台并进行测量台调平:测量台采用高精度双轴转台,将双轴转台内框及外框均置为0
°
,调整支撑双轴转台的千斤顶,使内框安装台面与水平面平行;步骤2、在内框的安装台面上固定安装四棱台式台体;步骤3、测量加速度计组件安装面的水平偏差,得到加速度计组件安装面在台体坐标系上的水平偏差角,该水平偏差角包括与外框轴线平行的偏差角为x0,与外框轴线垂直的偏差角为y0;步骤4、将四棱台式台体的第一个陀螺安装面调平并测量其姿态角,该姿态角包括与外框轴线垂直的偏差角为y1及与外框轴线平行的偏差角为x1;步骤5、测量其余三个陀螺安装面的姿态角,具体为:先后旋转内框台面90
°
、180
°
及270
°
,按照步骤4中方法测得其余三个陀螺安装面的姿态角分别为:x2、y2;x3、y3;x4、y4;步骤6、分析台体坐标系的安装误差,包括:6.1、陀螺安装面与加速度计组件安装面的角度误差,包括:第一个陀螺安装面与加速度计组件安装面的角度误差为:x1=x0+ y1第二个陀螺安装面与加速度计组件安装面的角度误差为:
x2=y0+ y2第三个陀螺安装面与加速度计组件安装面的角度误差为:x3=x0+ y3第四个陀螺安装面与加速度计组件安装面的角度误差为:x4=y0+ y46.2、 各陀螺安装面之间的正交误差,包括:第一个与第二个陀螺安装面之间的正交误差为:y1=x1+ x2第二个与第三个陀螺安装面之间的正交误差为:y2=x2+ x3第三个与第四个陀螺安装面之间的正交误差为:y3=x3+ x4第四个与第一个陀螺安装面之间的正交误差为:y4=x4+ x1步骤7、形成补偿矩阵将x1、x2、x3、x4、y1、y2、y3、y4形成姿态角补偿矩阵,姿态角补偿矩阵的建立过程为:设为四个陀螺仪角速度输入值,为系统三正交坐标系的角速度输入;为系统测量矩阵,其中,则有。
6.进一步的:步骤1中进行测量台调平、步骤中3中测量加速度计组件安装面的水平偏差、步骤4及步骤5中测量陀螺安装面的姿态角均采用高精度电子水平仪。
7.本发明具有的优点和积极效果:1、本发明通过测得四个陀螺安装面的姿态角,由姿态角得到台体坐标系的安装误差,由安装误差建立姿态角补偿矩阵,从而可将四个陀螺安装面的两个方向的测量值补偿到系统结算方案中,从而保障谐振惯导导航精度。
8.2、本发明通过使用双轴转台和电子水平仪,精确测量各陀螺安装面精度。在系统实际应用时,先利用本方案测量出的各陀螺安装面的姿态角,将陀螺仪输出由四陀螺圆锥坐标系s系转换到三轴正交坐标系b系,然后再进行系统级三轴分立式标定,可有效提高分立式标定精度,进而提高系统导航精度,具有很好的工程应用价值。
附图说明
9.图1是本发明进行测量台沿垂直于外框架轴调平的结构示意图;图2是本发明进行测量台沿平行于外框架轴调平的结构示意图;图3是本发明在测量台上安装台体的结构示意图;
图4是本发明沿垂直于测量台的外框架轴方向测量加速度组件的初始姿态的结构示意;图5是本发明沿平行于测量台的外框架轴方向测量加速度组件的初始姿态的结构示意;图6是本发明测量加速度组件的初始姿态的坐标方向示意图;图7是本发明沿垂直于测量台的外框架轴方向测量陀螺安装面姿态角的结构示意图;图8是本发明沿平行于测量台的外框架轴方向测量陀螺安装面姿态角的结构示意图。
具体实施方式
10.以下结合附图并通过实施例对本发明的结构作进一步说明。需要说明的是本实施例是叙述性的,而不是限定性的。
11.一种惯导系统的四棱台式台体陀螺安装面精度测试方法,请参见图1-8,其发明点为:包括如下步骤:骤1、选择测量台并进行测量台调平所述测量台采用高精度双轴转台,比如采用acutronic公司ac2236型,精度为1
″
的高精度双轴转台。该测量台主要由u型外框3、内框2构成,在u型外框的上端两边安装有转轴5,转轴与内框的下部可转动式连接,内框由上下绕中心可相对转动的两部分构成,内框的上部分的上端形成安装台面。外框的下端通过千斤顶4支撑。具体的,调平过程为:将双轴转台内框及外框均置为0
°
,在内框安装台面上放置电子水平仪1,调整支撑双轴转台的千斤顶,使内框安装台面与水平面平行(电子水平仪示值在平行于外框轴线方向和垂直于外框轴线方向均小于1
″
),参加图1和图2。
12.步骤2、在内框的安装台面上固定安装四棱台式台体,具体的,使用螺钉将四棱台式台体安装到内框安装台面上,见图3。
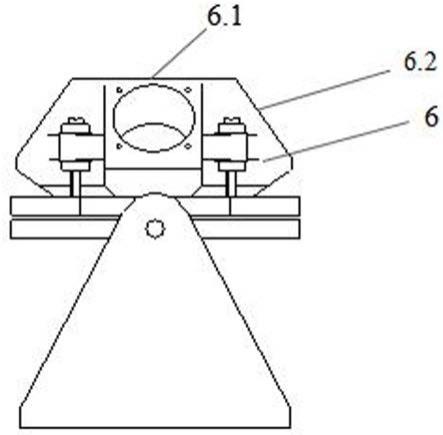
13.步骤3、测量加速度组件的初始姿态将高精度电子水平仪置于台体6的加速度计组件安装面6.1上,使用高精度电子水平仪测量加速度计组件安装面的水平偏差,得到加速度计组件安装面在台体坐标系上的水平偏差角,该水平偏差角包括与外框轴线(外框架上端的转轴轴线)平行的偏差角为x0,与外框轴线垂直的偏差角为y0。见图4-6。
14.步骤4、将四棱台式台体的第一个陀螺安装面调平并测量其姿态角将双轴转台外框轴旋转α角,使第一陀螺安装面置于水平,将高精度电子水平仪沿平行于外框轴线方向置于第一陀螺安装面上,旋转内框台面使高精度电子水平仪示值小于1
″
,将电子水平仪沿垂直外框轴线方向放置,测得与外框轴线垂直的偏差角为y1,将电子水平仪沿外框轴线方向放置,测得与外框轴线平行的偏差角为x1。
15.步骤5、测量其余三个陀螺安装面6.2的姿态角,具体为:先后旋转内框台面90
°
、180
°
及270
°
,按照步骤4中方法测得其余三个陀螺安装面的姿态角分别为:x2、y2;x3、y3;x4、y4。
16.步骤6、分析台体坐标系的安装误差,包括:
6.1、陀螺安装面与加速度计组件安装面的角度误差,包括:第一个陀螺安装面与加速度计组件安装面的角度误差为:x1=x0+ y1第二个陀螺安装面与加速度计组件安装面的角度误差为:x2=y0+ y2第三个陀螺安装面与加速度计组件安装面的角度误差为:x3=x0+ y3第四个陀螺安装面与加速度计组件安装面的角度误差为:x4=y0+ y46.2、 各陀螺安装面之间的正交误差,包括:第一个与第二个陀螺安装面之间的正交误差为:y1=x1+ x2第二个与第三个陀螺安装面之间的正交误差为:y2=x2+ x3第三个与第四个陀螺安装面之间的正交误差为:y3=x3+ x4第四个与第一个陀螺安装面之间的正交误差为:y4=x4+ x1步骤7、形成补偿矩阵将x1、x2、x3、x4、y1、y2、y3、y4、形成姿态角补偿矩阵,对陀螺形成的元件坐标系精确补偿,进一步提高惯导系统导航精度。姿态角补偿矩阵的建立过程为:设为四个陀螺仪角速度输入值,为系统三正交坐标系的角速度输入;为系统测量矩阵,其中,则有通过上述转换矩阵完成四陀螺圆锥坐标系下陀螺输出在三正交坐标系下的矩阵转换,从而可实现系统在三正交坐标系下的标定与导航解算,可有效提高标定精度和系统导航精度。
17.尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神范围内,各种替换、变化和修改都是可以的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1